
2. Аналогты-цифрлық түрлендіргіштер








3. Микро ЭЕМ-ға аналогтық түрлендіріп бергіштен сигналдарды ендіргенде көбінесе аналогты-цифрлық түрлендіргіштер пайдаланылады.
Жұмыс принципі. Аналогтық цифрлық түтрендірудің бірнеше әдістері болады, соның ішінде олардың мынадай екі түрі кеңінен таралған: интегралдау жіне кезекпен салыстыру әдістері. Аналогтық сигналды сегіз разрядты кодқа интегралдау әдісімен түрлендіру ұзақтығы, әдетте 1-20мкс, ал кезекпен салыстыру әдісімен 10-30мкс болады. Қажетті АЦТ ны таңдаудағы негізгі критерий түрлену уақыт, түрлендіргіштің дәлдігі мен құны. Интегралдау әдісімен жұмыс істейтін түрлендіргіштер арзан, әрі дәлдігі өте жоғары болғанымен олардың түрлену ұзақтығы тым үлкен болады. Кезекпен салыстыру әдісі түрленудің шапшаңдығын қамтамасыз етеді.
4. Вискозиметрлер
Тұтқырлықты динамикалық және кинематикалық деп ажыратуға болады. Динамикалық тұтқырлық өнімнің сырғанауға ығысуға кедергісін сипаттайды. Вискозметрлер. Тұтқырлықыт өлшеу үшін ақпа, вибрациялы ротациялы вискозиметрлер қолданады. Ақпа вискозиметрлер. Жұмыс принципі Ньютон сұйығының капилляр арқылы өткендегі ламинарлық ағысының қасиетіне негізделген. Тұтқырлыққа капиляр арқылы өтетін сұйық шығыны тәуелді. Вибрациялы вискозметрлер. Жұмыс істеу принципі: генератордың айнымалы тоқ болат серпімді пластинкалы әсер ететеін электромагниттік катушкаға беріледі. Ультра дыбысты вискозметрдің жұмыс істеу принципі: тербеліс генераторынан, тербеліс қабылдағыштан, күшейткіштен, тіркеуші аспаптан тұрады. Ротайиялы вискозметрлердің жұмыс принципі: зерттелетін заттардың айналмалы дененің бұралма кедергілік моментін өлшеуге негізделген. Бұралма моментті өлшеу әдістері айналмалы денелердің пішіндері тәрізді түрліше болуы мүмкін. Өлшеуіш аспап ретінде автомат потенциометрер қолданады.
№ 29 билет
1. Салыстырушы элемент деген не?
Автоматты жүйе өзара байланысқан және белгілі бір қызымет атқаратын дербес конструкциялық элементтен тұрады, оларды автоматика элементтері немесе құралдары деп атайды. Элементтерді жүйеде атқаратын қызыметіне қарай салыстырушы, түзетуші, қабылдаушы, жоспарлаушы, түрлендіруші және атқарушы деп ажыратады.
Салыстырушы элементтер реттелетін шаманың берілген мәнін  нақты мәнімен
нақты мәнімен  салыстырады. Бұл элементтің шығысында алынатын айырымдық сигнал
салыстырады. Бұл элементтің шығысында алынатын айырымдық сигнал  атқарушы элементке тікелей немесе күшейткіш арқылы беріледі.
атқарушы элементке тікелей немесе күшейткіш арқылы беріледі.
2. Диффериенциалдаушы буын
Дифференциалдаушы буын
Буын теңдеуі  ,
,
яғни, шығыстық сигнал кірістік сигналдың өзгеру жылдамдығына пропорционал
Беріліс функциясы 
Өтпелі функциясы h(t)=Кδ(t), мұнда δ(t) – дельта функция.
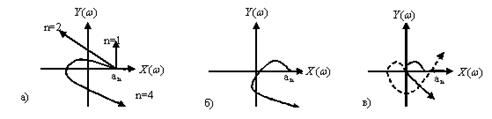
Жиіліктік сипаттамалары
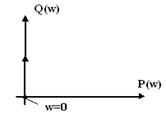
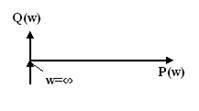
Буынның КБФ-сы W(jω)=jкω,
яғни буын АФЖС оң жартылай жорамал өспен беттеседі. Егер ω=0, онда А(ω)=0, жиіліктің өсуімен А(ω) мәні ұлғаяды, егер ω=∞, онда А(ω)=∞.
КБФ-ың модульі А(ω)=ωК,
КБФ-ың аргументі φ(ω)=90°,
Яғни, жиіліктің өсуімен шығыстық тербелістің амплитудасы ұлғаяды. Аргумент жиілікке тәуелсіз, бұл буында шығыстық сигнал кірістік сигналдан фаза жағынан барлық жиілікте 90° озыңқы жүреді.
 11.1 сурет Буын АФЖС
11.1 сурет Буын АФЖС
ЛАЖС-ың өрнегі  .
.
Буынның ЛАЖС көлбеулігі 20 дб/дек болатын түзумен сипатталады. ω=1 жиілігінде ордината мәні 20 lg к. тең
Буынның ЛФЖС жиілік өсінен 90° қашықтықта жатқан , жиілік өсіне параллель түзу (11.2 б сурет)
а) 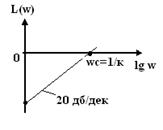 б)
б) 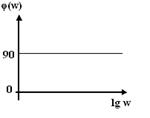
11.2 сурет Буынның а)– ЛАЖС және б) – ЛФЖС
3. Деңгей өлшеуіштер
Технологиялық процесстердің автоматты жүйесінің сипаттамасын және құрылымын анықтайтын, олардың автоматика құрылғыларымен және аспаптарымен, оның ішінде есептеу техникасының құрылғыларымен жабдықталуын анықтайтын негізгі техникалық құжатты автоматтандырылған схема деп атаймыз.
Автоматтандырылған схеманы өңдеу технологиялық процесстерді талдауға, олардың объектілерінің статикалық және динамикалық сипаттамасын игеруге, яғни негізгі басқарылатын және бақыланатын параметрлерді дұрыс таңдауға, олардың өзгеру диапазонын және жұмыстық белгіленуін қоюға, қозу әсерінің сипаттамасын анықтауға және басқару әсерін таңдауға әкеледі.
Құбырлардың қиылысқан жеріне нүкте қойылады, ал егер нүкте болмаса онда құбырлардың қиылыспағанын көрсетеді. Мұндай автоматика құрылғыларына ұлғаю термометрлері, термопара, пирометр датчиктері, ротаметр, газдың және сұйықтың шығынын өлшеуіштер, индуктивті шығын датчиктері, деңгей өлшеуіштер, радиоактивтілік, тығыздық датчиктері және басқа да орындау механизмдері, реттеу органдары жатады.
№ 30 билет
1. Түрлендіруші элемент деген не?
Автоматты жүйе өзара байланысқан және белгілі бір қызымет атқаратын дербес конструкциялық элементтен тұрады, оларды автоматика элементтері немесе құралдары деп атайды. Элементтерді жүйеде атқаратын қызыметіне қарай салыстырушы, түзетуші, қабылдаушы, жоспарлаушы, түрлендіруші және атқарушы деп ажыратады.
Түрлендіруші элементтер сигналдың пайдалануға ыңғайлы түрге түрлендіруін және оның қуатын магниттік, электрондық және т.б. күшейткіштер арқылы үдетуін жүзеге асырады.
2. Шығын өлшеу аспаптары
Тамақ өнеркәсібінде аралық өнімдерді дайындауда бір бірімен әсерлеспейтін түрлі заттарды араластыру үрдісін іске асыру қажет болады. Араластыру үрдісіне сұйық заттар да, қатты сусымалы заттар да қатыса алады. Араластырғыштар қоспаның біртектілігін жүзеге асыру үшін, және араластыру үрдісін тездетуді жүзеге асыру үшін қалақтармен жабдықталады. Технологиялық үрдістің технологиялық ұйымдастырылуына қарай араластырғыштар үздікті және үздіксіз әсерлі болып бөлінеді.
Араластырғыштарды автоматизация объектісі ретінде «кірістік компонент шығыны - қоспа сапасының көрсеткіші» каналы бойынша таза кешігуі бар апериодты буынға жатқызуға болады. Бұл қоспа компоненттерінің физикалық параметрлеріне және араласу тиімділігіне байланысты болады. Осы белгі бойынша араластыру үрдісінің инерциялығын өлшеу диапазоны кең көлемде өзгеруі мүмкін.
Қажетті қоспа беретін К1 және К2 компоненттерінің шығыны сәйкес 1а және 2а шығын өлшеуіштердің көмегімен өлшенеді. Өлшеу нәтижесі екіншілік көрсеткіш, өздігінен жазатын аспаптарда 1б және 2б көрсетіледі, содан кейін шығын қатынасының реттеуішіне 1в беріледі, ол қашықтықтан басқару панелі 1г арқылы бірінші компоненттің шығынына байланысты екінші компоненттің К2 шығынын реттейтін реттеу клапанына 1д әсер етеді.
3. Орнықтылық жөнінде жалпы түсінік
Жүйенің орнықтылығы деп оның тепе-теңдік күйінен ауытқуына себеп болған әсерді алып тастағаннан кейін, баспатқы орнықтылық қалпына оралу қабілеттілігін айтады.
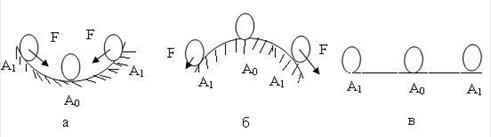
Автоматты реттеу жүйесінің статикалық тепе-теңдік күйі әртүрлі болады. Жүйенің орнықтылық режиміндегі тепе-теңдік күйі үш түрге ажыратылады (12.1 - сурет):
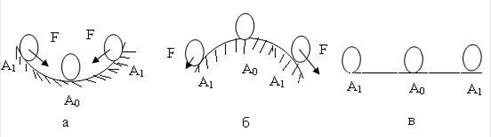
12.1 сурет. Тепе теңдік күйдің үш түрі: а – орнықты; б – орнықсыз; в – бейтарап.
Тепе теңдік күйдің мүмкін болатын түрлерін алдымен беттің әртүрлі нүктелерінде орналасқан шариктің қозғалыс бағытынан қарастырайық: а) шарикті бастапқы тепе теңдік күйіне қайтарушы F күші шарик беттің қай жерінде жатса да пайда болады; б) шарик тепе-теңдік күйінен сәл ауытқыса F күші пайда болып, оны одан әрі тепе теңдік күйінен ауытқытуға тырысады; в) шарик беттің қай нүктесінде жатса да орнықты күйінде қалады.
Автоматты жүйелере мынадай үш талаптар орындалуы қажет: орнықтылық шарты, өтпелі процеске және қалыптасқан режимге қойылатын талаптар АРЖ-ның орнатылығын анықтау мәселесі басты болып саналады, өйткені орнықсыз жүйелер іс жүзінде жарамсыз.
№ 31 билет
1. Салыстырушы элемент деген не?
Автоматты жүйе өзара байланысқан және белгілі бір қызымет атқаратын дербес конструкциялық элементтен тұрады, оларды автоматика элементтері немесе құралдары деп атайды. Элементтерді жүйеде атқаратын қызыметіне қарай салыстырушы, түзетуші, қабылдаушы, жоспарлаушы, түрлендіруші және атқарушы деп ажыратады.
Салыстырушы элементтер реттелетін шаманың берілген мәнін нақты мәнімен салыстырады. Бұл элементтің шығысында алынатын айырымдық сигнал атқарушы элементке тікелей немесе күшейткіш арқылы беріледі.
2. Интегралдаушы буын
Буын теңдеуі  .
.
Теңдеуді келесі түрде келтіруге болады  ,
,
Яғни, шығыстық шаманың жылдамдығы кірістік шамаға пропорционал.
Буынның беріліс функциясы 
Өтпелі функциясы 
Өтпелі функциясы кординатаның бас нүктесінен өтетін түзумен сипатталады. Көлбеуліктің бұрыштық коэффициенті К –ға тең (10.3 сурет)
Импульстік өтпелі функциясы ω(t)=К,
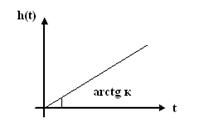
10.3 сурет Өтпелі сипаттама
яғни, импульстік өтпелі сипаттамасы абсцисса өсіне параллель жатыр.
Жиіліктік сипаттамалары
Буынның КБФ – сы 
Буынның АФЖС жорамал өстің бойында жатыр (10.2 сурет).
10.2-сурет. АФЖС звеносы
КБФ-ың модульі А(ω)=К/ω,
КБФ-ың аргументі φ(ω)=-π/2.
Бұл өрнектерден көретініміз, егер ω=0 болса, онда А(ω)=∞. Жиіліктің өсуімен А(ω) мәні азаяды, егер ω=∞ болса, онда А(ω)=0. Бұл буында шығыстық сигнал кірістік сигналдан фаза жағынан барлық жиілікте - 90° қалыс қалады (10.3б суреті)
ЛАЖС-ың өрнегі  .
.
Буын ЛАЖС көлбеулігі– 20 дб/дек болатын, ал ω=1 жиілігінде ординатасы 20 lg к тең түзумен сипатталады. Қию жиілігі ωс = К.
а) 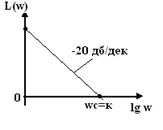 б)
б) 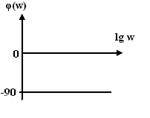
3. Электр орындаушы тетіктер
Электр орындаушы тетіктер қызмет әрекетіне қарай электромагниттік және электрқозғалтқышты болып бөлінеді. Бұлардың ішіндегі неғұлым қарапайымы, сенімдісі әрі тез әрекеттісі электромагниттік орындаушы тетікте болып саналады. Оларды әртүрлі реттеуші және тосқауыл клапандарының, шұралардың (вентильдедің), золотниктедің жұмысын басқару үшін пайдаланады. Орындаушы органның, шығыс қозғалу түріне қарай электромагниттік механизмдер қозғалысы түзу сызықты және қозғалысы айналмалы электомагниттік муфталар болып ажыратылады.
Құрылымы жағынан электромагниттер әртүрлі болып кездесуі мүмкін. Әйтсе де олардың 5.3-суретте келтірілгендей ортақ элементтері бар. Оларға катушка(2), жылжымалы өзекше(3), қайтымды серіппені (1) жатқызуға болады. Жылжымалы өзекше арқылы магнит өрісінің энергиясы механикалық энергияға түрленіп, сояуыш (4) (өзек-шток) арқылы тосқауыл бөлікке беріледі. Тосқауыл бөліктің қозғалуын тудыратын өзекшенің жылжу аралығын  жұмысшы жүріс (рабочий ход) деп атайды.
жұмысшы жүріс (рабочий ход) деп атайды.
Өзекшенің және оған байланысты реттеуші органның қозғалыс сипаты бойынша электомагниттік тетіктер татушы, итеруші, бұрушы, тежеуші және реверсивті болып ажыратылады.
№ 32 билет
1. Атқарушы элемент деген не?
Автоматты жүйе өзара байланысқан және белгілі бір қызымет атқаратын дербес конструкциялық элементтен тұрады, оларды автоматика элементтері немесе құралдары деп атайды. Элементтерді жүйеде атқаратын қызыметіне қарай салыстырушы, түзетуші, қабылдаушы, жоспарлаушы, түрлендіруші және атқарушы деп ажыратады.
Атқарушы элементтер басқару объектісіне берілетін басқару әсерін тудырады. Олар басқару объектісіне берілетін не одан алынатын энергия немесе заттар санын өзгерту арқылы басқарылатын шаманы берілген мәніне сәйкес етіп ұстап отырады.
2. Гурвиц критерийі
Критериді қолдану үшін сипаттама теңдеуінің коэффицинттерінен келесі кестені құрамыз
 (13.1)
(13.1)
Гурвиц критериін қолдану үшін (13.1) сипаттама теңдеуінің коэффициенттерінен Гурвицтің бас анықтауышын құрамыз
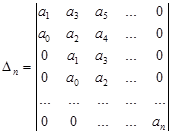
Гурвиц анықтауышын құру тәртібі:
1) Бас диоганалға сипаттама теңдеуінің  -ден бастап ап -ға дейіңгі коэффициенттерін орналастыру керек
-ден бастап ап -ға дейіңгі коэффициенттерін орналастыру керек
2) Бас диоганалдан жоғары жатқан коэффициеттердің индекстері біртіндеп ұлғаяды, ал төмен жатқан коэффициенттердің индекстері біртіндеп кеми береді
3) Егер коэффициенттердің индекстері нөлден кіші немесе  үлкен болған жағдайда, коэффициенттер нөлмен алмастырылады
үлкен болған жағдайда, коэффициенттер нөлмен алмастырылады
Гурвиц критериінің тұжырымдалуы: Егер  болған жағдайда, Гурвиц анықтауышы
болған жағдайда, Гурвиц анықтауышы  және оның бардық диоганал минорлары
және оның бардық диоганал минорлары  оң болса, онда жүйе орнықты деп есептеледі. Диоганал минорлар келесі формулалармен есептеледі
оң болса, онда жүйе орнықты деп есептеледі. Диоганал минорлар келесі формулалармен есептеледі
 ;
;  ;
;  ; т.с.с.
; т.с.с.
анықтауышын құру тәртібінен шығатыны  . Бұл теңдік екі жағдайда орындалады:
. Бұл теңдік екі жағдайда орындалады:  немесе
немесе  . Бірінші жағдайда жүйе апериодтық орнықтылық шекарасында болады (сипаттама теңдеуінің бір түбірі нөлге тең); Екінші жағдайда жүйе тербелмелі орнықтылық шекарасында болады (сипаттама теңдеуінің бір түйіндес түбірі жорамал ось бойында жатыр).
. Бірінші жағдайда жүйе апериодтық орнықтылық шекарасында болады (сипаттама теңдеуінің бір түбірі нөлге тең); Екінші жағдайда жүйе тербелмелі орнықтылық шекарасында болады (сипаттама теңдеуінің бір түйіндес түбірі жорамал ось бойында жатыр).
3. Реттеу сапасының негізгі көрсеткіштері
Автоматты реттеу жүйесінің қозғалыс орнықтылығы оның негізі, бірақ жеткілікті емес қасиеті болып табылады.
Сапаның негізгі көрсеткіштеріне: реттеу мерзімі, асыра реттеу, тербелмелі және қалыптасқан статикалық ауытқу жатады. Оған қоса, нақты жағдайда реттеу сапасына басқа да талаптар қойылады, айталық, реттелетін шаманың өзгерісінің ең үлкен жылдамдығы, оның тербелісінің негізгі жиілігі т.б. 5,1-суреттегідей h(t) өтпелі функция мысалында реттеу сапасының негізгі көрсеткіштерін қарастырамыз.
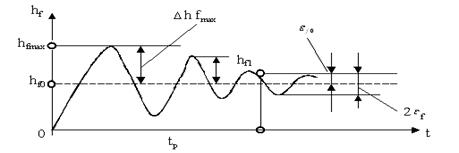
5.1-сурет.АРЖ сапа көрсеткіштері.
Реттеу мерзімі  абсолют шама
абсолют шама  жүйе жұмысының
жүйе жұмысының  берілген дәлдігінің ауқымынан аспайтын деңгейге жеткеніне дейінгі уақыт аралығы.
берілген дәлдігінің ауқымынан аспайтын деңгейге жеткеніне дейінгі уақыт аралығы.
Іс жүзінде реттеу мерзімі деп, өтпелі қате абсолют шамасының әлі де мүмкіндік мәнінен (әдетте, ол реттелетін параметрдің қалыптасқан мәнінің 3-5 % құрайды) кем болатын уақыт аралығын (өтпелі процесстің басынан) айтады. 0-ден -ға дейінгі уақыт аралығы реттеу мерзімі болып табылады. Реттеу мерзімі өтпелі процесстің ұзақтығын анықтайды.
Асыра реттеу  деп реттелетін шаманың процентпен өрнектелген қалыптасқан мәнінен
деп реттелетін шаманың процентпен өрнектелген қалыптасқан мәнінен  максимал ауытқуын
максимал ауытқуын  айтады.
айтады.  абсолют шама өтпелі сипаттамадан анықталады:
абсолют шама өтпелі сипаттамадан анықталады:
=  -
-  . (5.1)
. (5.1)
Осыған сәйкес асыра реттеу мынаған тең болады
 . (5.2)
. (5.2)
Жүйенің тербелмелілігі реттелетін шаманың реттеу мерзімі кезіндегі тербеліс санымен сипатталады. Егер осы уақыт ішіндегі жүйедегі өтпелі процесс технология шарты бойынша алдын ала берілген санннан аз тербеліс жасаса, онда жүйе өзінің тербелмелілігі жөнінде қажетті реттеу талабында деуге болады.
Қалыптасқан статикалық ауытқу (  ) өтпелі процесс аяқталғаннан кейін реттелетін шаманың қалыптасқан мәні
) өтпелі процесс аяқталғаннан кейін реттелетін шаманың қалыптасқан мәні  мен оның берілген мәні
мен оның берілген мәні  арасындағы айырым түрінде анықталады:
арасындағы айырым түрінде анықталады:
 (5.3)
(5.3)
Қажетті реттеу сапасына қол жеткізу үшін статикалық дәлділікті қамтамасыз ету керек. Статикалық қате реттеуіштің жалпы күшейту коэффициентін арттыру арқылы азайтылуы мүмкін.
№ 33 билет
1. Қандай байланысты негізгі байланыс дейміз?
Автоматты жүйенің құрылымдық схемасының байланысы негізгі, қосымша және кері байланыстар болып ажыратылады. Негізгі байланыс деп, автоматты басқару жүйесінің негізгі тізбегі бойындағы бөліктерінің арасындағы түзілетін байланысты айтады.
2. Реттеу сапасының жанама бағасы
Автоматты реттеу жүйесінің қозғалыс орнықтылығы оның негізі, бірақ жеткілікті емес қасиеті болып табылады. Автоматты реттеу жүйесінің қозғалыс орнықтылығы немесе орнықсыздығы деп ондағы өтпелі процестің өшуінің бар немесе жоқ екендігінен түсінуге болады.
Реттеу процесінің сапасы ретінде автоматты реттеуіштің жеткілікті дәлдікпен реттелетін параметрдің шамасын белгіленген өзгеріс заңы бойынша ұстап отыру қабілетін айтуға болады. Реттеу процесінің сапасы реттелетін параметр белгіленген шамадан аз ауытқыса, әрі белгіленген режимге тез жетсе, соғұрлым жоғары болады.
Сапаның негізгі көрсеткіштеріне: реттеу мерзімі, асыра реттеу, тербелмелі және қалыптасқан статикалық ауытқу жатады. Оған қоса, нақты жағдайда реттеу сапасына басқа да талаптар қойылады, айталық, реттелетін шаманың өзгерісінің ең үлкен жылдамдығы, оның тербелісінің негізгі жиілігі т.б. 5,1-суреттегідей h(t) өтпелі функция мысалында реттеу сапасының негізгі көрсеткіштерін қарастырамыз.
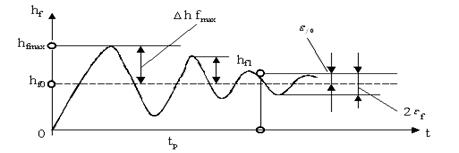
5.1-сурет.АРЖ сапа көрсеткіштері.
3. Пневматикалық орындаушы тетіктер
Гидравликалық және пневматикалық орындаушы қозғалтқыштар қысым астындағы жұмыс ортасының энергиясын ілгерлемелі және айналмалы қозғалыстың механикалық энергиясына түрлендіреді, пневмо қозғалтқыштарда жұмыстық орта ретінде сығылған ауа пайдаланылады. Автоматты басқару құрылғыларында гидро және пневма қозғалтқыштар электрлікке қарағанда сирек пайдаланғанмен техникалық жағдайда қарағанда тиімді болып келеді. Гидро және пневма қозғалтқыштар шағын болып келгенмен басқа қозғалтшықтарға қарағанда өте үлкен күш тудыруға қабілетті. Құрылысы қарапайым жұмысы сенімді болып келеді. Гидравликалық және пневматикалық қозғалтқыштардың жұмыс істеу принципі бірдей, айырмашылығы тез әрекет етуінде, әртүрлігінде. Гидро және пневмо қозғалтқыштар ілгерлемелі қозғалыста мембраналы және поршенді әрі айналмалы тегершікті қозғалтқыштар қалақты, плунжерлі , турбиналы болып бөлінеді. Басқару тәсілі б-ша гид-о және пневмо қоз-штар дросселді және көлемді болып бөлінеді. Дросселді басқарғанда басқарушы құрылғы ретінде золотниктер, ағынды түтіктер қолданылады. Көлемді басқаруда насостарды немесе жұмыс өнімділігі айналмалы компрессорларды қолданады.
№ 34 билет
1. Қандай байланысты қосалқы байланыс дейміз?
Автоматты жүйенің құрылымдық схемасының байланысы негізгі, қосымша және кері байланыстар болып ажыратылады. Қосымша байланыс деп, негізгі тізбекке не оның қайсы бір бөлігіне қосалқы түрде әсер беріу жорлын түзетін автоматты басқару жүйесінің құрылымдық схемасының байланысын айтады.
2. Михайлов критерийі
Михайлов критериі
Бұл критерий бойынша тұйықталған және тұйықталмаған жүйелердің орнықтылығын анықтауға болады. Критерий Михайлов қисығының комплекстік жазықтығындағы графигінің өзгерісін талдауға негізделген. Михайлов қисығы (13.1) сипаттама полиномынан алынады. Ол үшін сипаттама теңдеуінде  деп қабылдап, келесі функцияны аламыз
деп қабылдап, келесі функцияны аламыз

мұндағы  нақты бөлік
нақты бөлік
 жорамал бөлік
жорамал бөлік
Жиілік нөлден шексіздікке дейін өзгергенде,  векторының ұшы комплекс жазықтығында годограф сызады. Бұл сызылған годографты Михайлов қисығы деп атайды. Михайлов критериі былайша тұжрымдалады: дәрежелі жүйе орнықты болу үшін жиілік нөлден шексіздікке дейін өзгергенде Михайлов қисығы сағат тіліне қарсы бағытта біртіндеп ширекті кординатаның бас нүктесін баспай өтуі қажет (10.1 сурет)
векторының ұшы комплекс жазықтығында годограф сызады. Бұл сызылған годографты Михайлов қисығы деп атайды. Михайлов критериі былайша тұжрымдалады: дәрежелі жүйе орнықты болу үшін жиілік нөлден шексіздікке дейін өзгергенде Михайлов қисығы сағат тіліне қарсы бағытта біртіндеп ширекті кординатаның бас нүктесін баспай өтуі қажет (10.1 сурет)
13.1 сурет Михайлов критериінің түсініктемесіне
а) – орнықты жүйе, б) – орнықсыз жүйе., в) -орнықтылық шекарасында
Егер  , онда
, онда  және
және  , яғни Михайлов қисығы нақты оң жартылай осінде орналасқан
, яғни Михайлов қисығы нақты оң жартылай осінде орналасқан  нүктесінен басталады. Практикалық есептеулерде Михайлов қисығын тұрғызбай-ақ , сол қисықтың ерекше нүктелерін табу арқылы қисықтың өзгерісін зерттеуге болады.: Михайлов қисығының кордината өсімен қиылысу нүтелері келесі шарттан анықталады
нүктесінен басталады. Практикалық есептеулерде Михайлов қисығын тұрғызбай-ақ , сол қисықтың ерекше нүктелерін табу арқылы қисықтың өзгерісін зерттеуге болады.: Михайлов қисығының кордината өсімен қиылысу нүтелері келесі шарттан анықталады
 и .
и .
Экстремалдық нүктелер келесі шарттан табылады
 және
және 
Михайлов қисығының қай ширекте шексіздікке кететінін білу үшін,  және
және  мәндерінің таңбаларын анықтау жеткілікті
мәндерінің таңбаларын анықтау жеткілікті
3.Орнықтылық қоры туралы түсінік
Жүйенің орнықтылығы деп оның тепе-теңдік күйінен ауытқуына себеп болған әсерді алып тастағаннан кейін, баспатқы орнықтылық қалпына оралу қабілеттілігін айтады.
Автоматты реттеу жүйесінің статикалық тепе-теңдік күйі әртүрлі болады. Жүйенің орнықтылық режиміндегі тепе-теңдік күйі үш түрге ажыратылады (12.1 - сурет):
12.1 сурет. Тепе теңдік күйдің үш түрі: а – орнықты; б – орнықсыз; в – бейтарап.
Тепе теңдік күйдің мүмкін болатын түрлерін алдымен беттің әртүрлі нүктелерінде орналасқан шариктің қозғалыс бағытынан қарастырайық: а) шарикті бастапқы тепе теңдік күйіне қайтарушы F күші шарик беттің қай жерінде жатса да пайда болады; б) шарик тепе-теңдік күйінен сәл ауытқыса F күші пайда болып, оны одан әрі тепе теңдік күйінен ауытқытуға тырысады; в) шарик беттің қай нүктесінде жатса да орнықты күйінде қалады.
№ 35 билет
1. Алгоритмдік құрылым дегеніміз не?
АБЖ алгоритмдік құрылымы деп, әр бөлігі ақпаратты түрлендірудегі белгілі бір алгоритмді орындауғы арналған құрылымды айтады.
2. Басқару объектілерінің негізгі қасиеті
Басқару деп- технологиялық процестерді жүргізу үшін басқару объектісіне әсер ететін тиімді ықпалды айтады.
Басқару объектісі деп- технологиялық процесстерді жүзеге асыратын жабдықтарды айтады. Жалпы технологиялық процесстер орындалатын барлық өндіріс жабдықтары басқару объектілеріне жатады. Технологиялық процестің өзі де басқару объектісі бола алады, әр объектіде физикалық шаманың берілген мәнін тұрақтандырып, немесе оны берілген бағыттта өзгертіп отыратын басқарғыш құрылғысы болады. Технологиялық процесті берілген қызымет алгоритмі бойынша өткізу мақсатында объектіге сырттан берілетін арнайы нұсқаулар (ережелер) жиынтығын басқару алгоритмі дейді.
Гидравликалық орындаушы тетіктер Гидравликалық және пневматикалық орындаушы қозғалтқыштар қысым астындағы жұмыс ортасының энергиясын ілгерлемелі және айналмалы қозғалыстың механикалық энергиясына түрлендіреді, гидро қозғалтқыштарда жұмыстық орта ретінде көбінесе жоғарғы қысымда өз қасиетін жоғалтпайтын минерал май пайдаланылады. Автоматты басқару құрылғыларында гидро және пневма қозғалтқыштар электрлікке қарағанда сирек пайдаланғанмен техникалық жағдайда қарағанда тиімді болып келеді. Гидро және пневма қозғалтқыштар шағын болып келгенмен басқа қозғалтшықтарға қарағанда өте үлкен күш тудыруға қабілетті. Құрылысы қарапайым жұмысы сенімді болып келеді. Гидравликалық және пневматикалық қозғалтқыштардың жұмыс істеу принципі бірдей, айырмашылығы тез әрекет етуінде, әртүрлігінде. Гидро және пневмо қозғалтқыштар ілгерлемелі қозғалыста мембраналы және поршенді әрі айналмалы тегершікті қозғалтқыштар қалақты, плунжерлі , турбиналы болып бөлінеді. Басқару тәсілі б-ша гид-о және пневмо қоз-штар дросселді және көлемді болып бөлінеді. Дросселді басқарғанда басқарушы құрылғы ретінде золотниктер, ағынды түтіктер қолданылады. Көлемді басқаруда насостарды немесе жұмыс өнімділігі айналмалы компрессорларды қолданады.
3. Гидравликалық орындаушы тетіктер.
Гидравликалық және пневматикалық орындаушы қозғалтқыштар қысым астындағы жұмыс ортасының энергиясын ілгерлемелі және айналмалы қозғалыстың механикалық энергиясына түрлендіреді, гидро қозғалтқыштарда жұмыстық орта ретінде көбінесе жоғарғы қысымда өз қасиетін жоғалтпайтын минерал май пайдаланылады. Автоматты басқару құрылғыларында гидро және пневма қозғалтқыштар электрлікке қарағанда сирек пайдаланғанмен техникалық жағдайда қарағанда тиімді болып келеді. Гидро және пневма қозғалтқыштар шағын болып келгенмен басқа қозғалтшықтарға қарағанда өте үлкен күш тудыруға қабілетті. Құрылысы қарапайым жұмысы сенімді болып келеді. Гидравликалық және пневматикалық қозғалтқыштардың жұмыс істеу принципі бірдей, айырмашылығы тез әрекет етуінде, әртүрлігінде. Гидро және пневмо қозғалтқыштар ілгерлемелі қозғалыста мембраналы және поршенді әрі айналмалы тегершікті қозғалтқыштар қалақты, плунжерлі , турбиналы болып бөлінеді. Басқару тәсілі б-ша гид-о және пневмо қоз-штар дросселді және көлемді болып бөлінеді. Дросселді басқарғанда басқарушы құрылғы ретінде золотниктер, ағынды түтіктер қолданылады. Көлемді басқаруда насостарды немесе жұмыс өнімділігі айналмалы компрессорларды қолданады.
№ 36 билет
1. Функционалдық құрылым дегеніміз не?
АБЖ функционалдық құрылымында әрбір бөлік белгілі бір қызмет атқарады,қызмет ретінде автоматты басқарушы құрылғының ақпарат алу, оны өңдеу, т.б. осы секілді негізгі қызметін, сонымен бірге сигналды беру, оларды салыстыру, ақпаратты беру түрін өзгерті тәрізді дербес қызметін айтуға болады.
2. Найквист критерийі
Бұл критеридің жәрдемімен тұйықталмағанған жүйенің АФЖС-сы бойынша тұйықталған жүйенің орнықтылығын анықтауға болады. Найквист критериін қолдану үшін, жүйенің тұйықталмаған кездегі КБФ-ын анықтау қажет.
 (14.1)
(14.1)
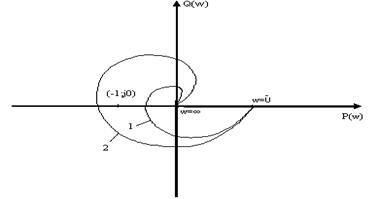
14.1 сурет Тұйықталмаған жүйе АФЖС. 1- орнықты, 2- орнықсыз жүйе
Жиілікке түрлі мән бере отырып, тұйықталмаған жүйенің АФЖС-ын тұрғызу арқылы тұйықталған жүйенің орнықтылығына баға беру қажет.
Найквист критериі былайша тұжрымдалады: Егер тұйықталмаған жүйе орнықты болса, немесе орнықтылық шекарасында болса, онда тұйықталған жүйе орнықтылығы үшін тұйықталмаған жүйенің АФЖС жиілік нөлден шексіздікке дейін өзгергенде кординатасы (-1, j0) нүктесін қамтымауы әрі қажетті әрі жеткілікті шарты болып табылады (14.1 сурет). Егер тұйықталмаған жүйе орнықсыз болса, яғни сипаттама теңдеуінің m түбірі жорамал өстің оң жағында орналасса, онда тұйықталған жүйе орнықтылығының қажетті әрі жеткілікті шарты, жиілік нөлден шексіздікке дейін өзгергенде тұйықталмаған жүйе АФЖС кординатасы (-1, j0) нүктесін сағат тіліне қарсы бағытта m/2 рет қамтуы қажет. Найквист критериіне мынадай физикалық мән беруге болады. Жүйе кірісіне бірлік амплитудалы тербеліс берілсін. Егер тұйықталмаған жүйенің АФЖС кординатасы (-1, j0) нүктесінен өтсе, онда шығыстық тербеліс фаза жағынан кірістік тербелістен 180 0 қалыс қалады. Бұл жағдайла жүйені тұйықтаса, онда тұйықталған жүйеде өшпейтін тербеліс туындайды, яғни жүйе орнықтылық шекарасында болады.
3. Реттеуіштер және реттеу заңдылықтары
Автоматты реттеу деп- технологиялық процесстің параметрлерін алдын ала берілген заңдылықпен өзгертуді немесе берілген деңгейде ұстап тұруды айтады.
Автоматты реттеуішпен (АР) реттелетін объектінің (РО) жиынтығы автоматты реттеу жүйесін (АРЖ) құрайды.
Автоматты реттеуіш деп- реттелетін шаманы берілген мәнде ұстап отыратын немесе берілген заңдылықпен өзгертіп отыратын техникалық құрылғыны айтады.
Реттеу объектісінде технологиялық процесстің параметрлерлері реттеліп отырады.
Тәжрибе жүзінде реттеудің негізгі 2 түрі бар:
2. Қозу әсері бойынша реттеу принципі (компенсациялау принципі).

Бұл принциптің ерекшелігі, реттеуші ықпал  реттеу объектісіне әсер ететін қозуларға тәуелді түрде туындайды:
реттеу объектісіне әсер ететін қозуларға тәуелді түрде туындайды:

Бұлай туындаған реттеу әсері нәтижесінде, РО қозу әсерлері бейтарапсыздандырылады.
Кемшілігі: Реттеу жүйесінің шығысынан кірісіне реттелетін шамалардың нақты мәндері туралы деректердің түспеуі (себебі- жүйедегі кері байланыстың жоқтығы).
2. Ауытқу бойынша басқару принципі.
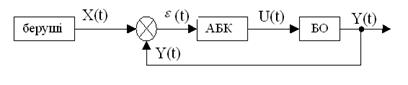
Бұл принципті жүзеге асыру үшін, жүйеде кері байланыстың болуы шарт.
Реттеу әсері жүйе шығысындағы реттелетін шаманың нақты мәні  мен жүйе кірісінің жоспарланған мәнәінің
мен жүйе кірісінің жоспарланған мәнәінің  арасындағы ауытқуға
арасындағы ауытқуға  тәуелді туындайды.
тәуелді туындайды.


Артықшылығы: Реттеу жүйесінің шығысы мен кірісіне кері байланыстың нәтижесінде келіп түскен реттелетін шамалардың мәндері реттеу әсерін туғызуға тікелей әсерін тигізеді.
Кемшілігі: Егер жүйеде үлкен беріліс коэффициентіне сәйкес режимде жұмыс істесе, жүйенің орнықтылығы нашарлайды және автотербеліске бейім болып келеді.
№ 37 билет
1. Конструкциялық құрылым дегеніміз не?
Егер АБЖ құрылымының әр бөлігі жеке конструкциялық тұтастық құратын бөлік болса, ондай құралымды конструкйиялық құрылым деп атайды.
2. Автоматтандыру схемасы
Технологиялық процесстердің автоматты жүйесінің сипаттамасын және құрылымын анықтайтын, олардың автоматика құрылғыларымен және аспаптарымен, оның ішінде есептеу техникасының құрылғыларымен жабдықталуын анықтайтын негізгі техникалық құжатты автоматтандырылған схема деп атаймыз.
Автоматтандырылған схеманы өңдеу технологиялық процесстерді талдауға, олардың объектілерінің статикалық және динамикалық сипаттамасын игеруге, яғни негізгі басқарылатын және бақыланатын параметрлерді дұрыс таңдауға, олардың өзгеру диапазонын және жұмыстық белгіленуін қоюға, қозу әсерінің сипаттамасын анықтауға және басқару әсерін таңдауға әкеледі.
Автоматтандырылған схеманың дайын түрі технологиялық жабдықтардың, коммуникациялардың, технолгиялық жабдықтар және автоматика элементтерінің арасындағы байланысты, автоматика құрылғылары мен аспаптарының шартты белгілері арқылы берілетін схемалық түрдегі сызбаны көрсетеді. Автоматтандырылған схема стандарттқа сәйкес орындалады.
Автоматтандырылған объектінің технологиялық схемасы схеманың жоғарғы жағында, жобаның технологиялық бөлігінде схемаға сәйкес қабылданған тұтас сызықтармен көрсетіледі. Технологиялық схема солдан оңға қарай тармақталуы керек.
3. Өлшеу аспаптары
Тамақ өндірістеріне және басқа да салаларда өлшеу, өлшеу құралдары, бақылау өнімнің жоғарғы сапасын алуда басты мәселе болып табылады.
Өндірісте обьективті өлшеу құралынсыз өндіріс процессін автоматтандыру
мүмкін емес.Өлшеу құрамының дамуы өнеркәсіп дамуымен өте тығыз байланысты. Өлшеу құралдарының дәлдігі, сенімділігі үлкен жетістіктер әкеледі.
Бақылау өлшеу аспаптары келесідей болып бөлінеді:
өлшенетін шама түріне қарай;
метрологиялық белгіленуіне қарай;
ақпарат алу тәсіліне қарай;
әсер ету принципіне қарай, энергия қолдануына қарай;
іске асырылуына қарай.
Бақылау өлшеу аспаптары өлшенетін шама түріне қарай келесідей түрлерге бөлінеді: температура; қысым; су, бу, сұйық шығынын; сұйық және сусымалы заттардың деңгейін; тығыздық; ылғалдылық; тұтқырлылық өлшеу аспаптары.
Метрологиялық белгіленуіне қарай аспаптар жұмыстық (техникалық және практикалық), үлгілік және эталондық болып бөлінеді.