
Қосу элементін жылжыту








Түйінді жылжыту
8.3 сурет. Қосу элементін және түйінді жылжыту
Қосу элементін сигналдың өту бағытымен жылжыту барысында косу элементінің кірісіне аттап өткен буынның беріліс функциясы тіркеледі, ал сигнал бағытына қарсы бағытта жылжыту барысында косу элементінің кірісіне аттап өткен буынның беріліс функциясының кері шамасы тіркеледі. Схемаларды түрлендіру барысында қосу элементін сигналдарды алу түйіні арқылы секіртуге болмайды. Түйіндерді жылжыту ережесі суретте көрсетілгендей, қосу элементін жылжыту операцияларына керісінше іске асады. Түйіндердің орнын ауыстыруға болады.
№ 18 билет 1.Интегралдаушы буын Буын теңдеуі  . Теңдеуді келесі түрде келтіруге болады ,
. Теңдеуді келесі түрде келтіруге болады ,  Яғни, шығыстық шаманың жылдамдығы кірістік шамаға пропорционал.
Яғни, шығыстық шаманың жылдамдығы кірістік шамаға пропорционал.
2.Жоспарлаушы элементтер Жоспарлаушы құрылғыларының көпшілігі негізгі мынадай үш бөліктен: жетектен (привода), программа тасушы және баптау элементінен тұрады. Үзіліссіз әрекетті жоспарлаушы құрылғысының ең көп тараған жетегіне синхронды электр қозғалтқышы мен сағат механизмдері жатады. Ал оның программа тасушы ретінде әдетте механикалық құрылғылар күйентелі (рычагты) тетіктер және функционалды потенциометрлер пайдаланылады.Үзіліссіз әрекетті жоспарлаушы құрылғысының программа тасушысы ретінде құрылысы әртүрлі жұдырықшалы тетіктер қолданылады. Олар жұдырықшаның не жұдырықшалы сызығыштың айналмалы қозғалысын итергіш сүңгісінің тербелмелі не түзу сызықтық қозғалысына түрлендіруге арналған.Жұдырықшаның сүңгімен тұрақты жанасуын қамтамасыз ету тұрғысында жұдырықшалы тетіктер күштік тұйықталған, яғни ашық және кинематикалық тұйықталатын яғни жабық құрылғыларға ажыратады.Күштік тұйықталатын жұдырықшалар оңай жасалады және жоғары дәлдікті қамтамасыз етеді. Жабық жұдырықшаларды жетектің қуаты аз болған кезде пайдалану тиімді , өйткені серіппе керілмейтіндіктен кедергі моменті әлсірейді.Электрлік программалы және қадағалаушы реттеуштерде программа тасығыштар әдетте фунционалды потенциометрлер ретінде жасалады.
3.Комплекстік беріліс функциясы дегеніміз не? Комплекстік беріліс функциясы W(j  ) деп, тұрақталған режимдегі жүйенің комплексті түрде көрсетілген шығыстық шамасының комплексті түрде көрсетілген кірістік шамасына қатынасын айтады.
) деп, тұрақталған режимдегі жүйенің комплексті түрде көрсетілген шығыстық шамасының комплексті түрде көрсетілген кірістік шамасына қатынасын айтады.
№ 19 билет
1. Интегралдаушы буынның өтпелі сипаттамасын сызып көрсет. Өтпелі функциясы  ;Өтпелі функциясы кординатаның бас нүктесінен өтетін түзумен сипатталады. Көлбеуліктің бұрыштық коэффициенті К –ға тең (10.3 сурет)
;Өтпелі функциясы кординатаның бас нүктесінен өтетін түзумен сипатталады. Көлбеуліктің бұрыштық коэффициенті К –ға тең (10.3 сурет)
Импульстік өтпелі функциясы ω(t)=К,
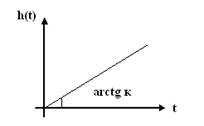
10.3 сурет Өтпелі сипаттама яғни, импульстік өтпелі сипаттамасы абсцисса өсіне параллель жатыр.2.Орнықтылық қоры жайлы жалпы түсінік . Автоматты жүйелерді пайдаланғанда олардың параметрлерін өзгертуге тура келеді.Егер жүйеде жеткілікті орнықтылық қоры болмаса, онда параметрлердің өзгерісі жүйені орнықсыз етуі ықтимал.Егерде сыртқы ықпал әсерімен орнықтылық күйінен айырылған жүйелер сыртқы ықпал әсері тоқтасымен белгілі бір уақыттан соң орнықты күйіне қайтып оралса, онда ондай жүйелерді орнықты жүйелер деп атайды. Жүйелердің орнықтылығын зерттеу, олардың еркін қозғалысын зерттеуге әкеп соғады. Автоматты жүйелердің орнықтылығын зерттеуде сипаттама теңдеуінің түбірлерін таппай-ақ, белгілі бір нышандарға сүйене отырып олардың орнықтылығына баға беруге болады. Жүйе орнықтылығын айқындап беретін нышандарды орнықтылық критерилері дейміз. Орнықтылық критерилерінің алгебралық және жиіліктік тәсілдері кездеседі. Алгебралық критерилерге Раус және Гурвиц критерилері жатады. Жиіліктік критерилеріне Найквист, Михайлов және логарифмдік жиіліктік критерилері жатады.Жүйе орнықтылық шекарасына қаншалықты жақын болатындығын жоғарыда қарастырылған критерийлердің кейбірінің көмегімен анықтауға болады.3.Буындары қарсы параллель жалғанған жүйенің сызбасын және сәйкес беріліс функциясын жазып көрсет. Параллель қосылған буындарда буындардың кірісіне бір мезетте бірдей ықпал беріледі де, буындардың шығыстық шамалары бір-бірімен қосылады. Параллель жалғанған буындары бар жүйенің беріліс функциясын былайша анықтайды. 
№ 20 билет
1.Кешігу буынының өтпелі сипаттамасын сызып көрсет. Өтпелі функциясы  Яғни, өтпелі сипаттамасы τ. уақытына кешіккен бірлік сатылы ықпалды қайталайды.Импульстік өтпелі функциясы ω(t)=δ(t-τ).
Яғни, өтпелі сипаттамасы τ. уақытына кешіккен бірлік сатылы ықпалды қайталайды.Импульстік өтпелі функциясы ω(t)=δ(t-τ).
2.Автоматты басқару жүйесінің құрылымы Автоматты басқару жүйелерінің, олардың жеке буындарының және қосылыстарының қасиеттері олардың сипаттамаларымен айқындалады. СТАТИКАЛЫҚ СИПАТТАМАЛАР буынның не жүйенің орныққан күйдегі шығыстық және кірістік шамаларының арасындағы тәуелділікті анықтайды. 
Статикалық сипаттамалары бар жүйе буындары немесе қосылыс түріндегі автоматтық реттеу объектілерін статикалық деп атайды. Бұларды өздігінен түзелетін объектілер деп те атайды, өйткені олардың кірісіне келетін тұрақты әсерден реттелетін (шығыстық) шама белгілі бір тұрақты мәнге дейін ғана өсіп, одан әрі жаңа деңгейде тұрақтанады, мұны реттеуші болмаған жағдайда объектінің өзі жүргізе алады.ДИНАМИКАЛЫҚ СИПАТТАМА.Әрбір динамикалық жүйе немесе олардың элементтері келесі динамикалық жүйелермен сипатталады:1.Динамикалық теңдеу, 2.Беріліс функциясы,3.Өтпелі функция,4.Импульсті өтпелі функция,5.Жиіліктік сипаттамалар.Бұл сипаттамалар бойынша жүйелердің динамикалық қасиеттерін анықтауға болады (жұмыс режимі, орнықтылығы т.с.с.).
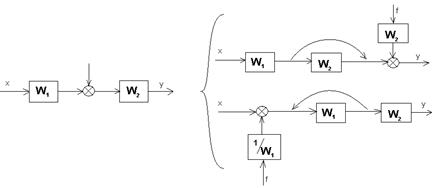
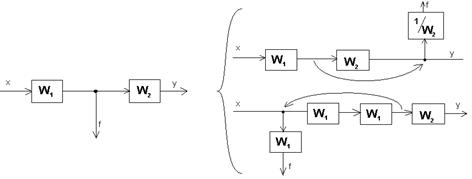
3.Құрылымдық схеманы парапар түрлендіру әдісін сызып көрсет. Көп контурлы жүйелердің беріліс функциясын анықтау үшін, оларды бір контурлы жүйеге түрлендіреді. Түрлендіру барысында құрылымдық схемаларды түрлендіру ережелері қолданылады. Төменде (8.3 сурет) құрылымдық схемаларды парапар түрлендіру ережелері келтірілген
Қосу элементін жылжыту
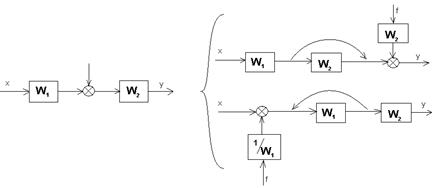
Түйінді жылжыту
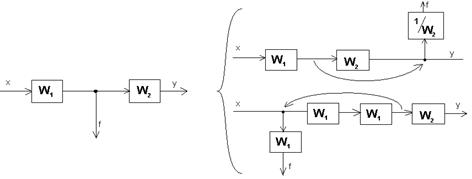
8.3 сурет. Қосу элементін және түйінді жылжыту
Қосу элементін сигналдың өту бағытымен жылжыту барысында косу элементінің кірісіне аттап өткен буынның беріліс функциясы тіркеледі, ал сигнал бағытына қарсы бағытта жылжыту барысында косу элементінің кірісіне аттап өткен буынның беріліс функциясының кері шамасы тіркеледі. Схемаларды түрлендіру барысында қосу элементін сигналдарды алу түйіні арқылы секіртуге болмайды. Түйіндерді жылжыту ережесі суретте көрсетілгендей, қосу элементін жылжыту операцияларына керісінше іске асады. Түйіндердің орнын ауыстыруға болады.
21 билет
1. Автоматты басқару жүйесі деген не?
Бір-бірімен байланысты және басқару алгоритміне сәйкес өзара әрекеттесе жұмыс жасайтын автоматты басқару құрылғысы мен басқару объектісінің жиынтығы автоматты басқару жүйесі (АБЖ) деп аталады.
Басқару тізбегінде кері байланыс болмайды, басқарушы сигналдар жүйеде тек бір бағытта ағады.
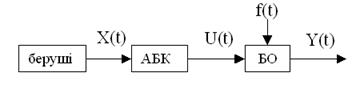
Берушітің міндеті- басқарылатын шаманы Y(t) алдын ала берілген мәнде ұстап немесе өзгертетін ықпалдарды Х(t) (ақпараттың) туғызу нәтижесінде, АБҚ басқару әсерін туғызады  .
.
Басқару әсері U(t) (БО) ықпал тигізіп, басқарылатын шаманың Y(t) мәнін басқару алгоритміне сәйкес өзгертіп отырады.
Сыртқы ортаның БО тигізетін әсері- технологиялық процесстердің қалыпты өзгеруіне кедергі жасайды. Қозу әсері технологиялық процесстердің қалыпты өзгеруіне кедергі жасайды. Қозу әсері күшейтілген сайын, басқарылатын шама Y(t) мен оның алдын ала берілген мәнінің Х(t) арасындағы сәйкессіздік ұлғая түседі.