
2. дистанционное управление включением прибора в работу или его отключением.








3. сигнализация о возникновении аварийной ситуации при выходе регулируемой величины за заданные пределы, а также при обрыве в цепи измерения.
4. Они имеют аналог. выходы 4-20 мА для управления мощностью различных тепловых устройств (лампы и т.д).
5. А также имеют дискретные выходы 0-10 В для управления электродвигателями и ИМ-ми.Данные приборы имеют встроенный интерфейс RS 485 для связи с ЭВМ и регистрации на ее мониторе данных.Эти приборы изготавливают в одно-, двух- и восьмиканальном исполнениях.
Для автоматизации ХТП с большим кол-вом параметров применяются микропроцессоры-контроллеры, которые позволяют реализовывать все ф-ции для управления сложными ХТП, т.е. ф-ции контроля, регулирования, защиты, блокировки и т.д.
В наст. вр. широко примен. различные типы контроллеров. Наиболее применимы контроллеры типа «КРОСС-500» и «SimaticS7-300».
«КРОСС-500» ориентирован на построение недорогих систем автоматизации различной алгорифмич. и информационной емкости:Для построения макросистем с количеством каналов входов-выходов (124-368), Для построения минисистем с числом каналов (64-128), Микросистем с числом каналов (16-64).
Контроллер «КРОСС-500» предназначен для выполнения след. задач:
1. сбор информации от датчика и её первичная переработка (фильтрация и т.д);
2. выдачауправл. воздействий на различные ИМ;
3. регулирование технологических параметров по различным законам;
4. логическая логико-програм. управление технологич. оборудованием, в т.ч. пуск и остановка;
5. защита оборудования от аварийных ситуаций;
6. регистрация и накопление в электронной памяти измеряемых технологических параметров.
Функции:
– аварийная;
– предупредительная;
– контрольная сигнализация.
– сигнализация и извещение о различных технологических параметрах.
Модульный микропроцессор контроллер типа «SimaticS7-300».
Он предназначен для решения задач автоматизации средней степени сложности.
Широкий спектр модулей, а также 8 типов центральных процессоров позволяет адаптировать данный контроллер для решения задач любой сложности.
Также он имеет специальную систему программирования в виде пакета программ «Step 7».
Технические данные:
количество дискретных входов и выходов от 256 до 653;
кол-во аналоговых входов и выходов от 32 до 408;
Контроллеры «SimaticS7-300» имеют модульную конструкцию и включают в себя модули центральных процессоров (СРИ), а также в зависимости от степени сложности решаемой задачи, могут быть использованы также различные типы центральных процессоров, которые отличаются различной информационной емкостью, V памяти и т.д.
К таким модулям относ. след:
сигнальные (SM) – предназначены для ввода и вывода конкретных дискретных и аналог. сигналов, с различными временными и электрич. хар-ками.
функциональные (FM) – предназначены для осуществления задач автоматического регулирования, обработки сигналов и др. Имеют встроенный процессор. Могут работать самостоятельно при отказе центрального процессора.
коммуникационные (СР) – предназначен для связи с др. внешними устройствами, сист. управления по цифровым каналам и связи с ЭВМ.
76. Выбор исполнительных устройств (ИУ).
При выборе ИУ необходимо учитывать следующие требования:
1) св-ва контролируемого ОС;
2) скорость регулирования, зависящая от возд-й вырабат. регулятором
3) линейность характеристик исполнит. устройств.
ИУ в АСР состоит из 2-ух основных эл-тов: ИМ и РО.
РО непосредственно связан с протекающей через него контролир. средой и выбирается в соотв. со св-вами данной среды и пропускной способностью.
ИМ явл-тся приводом, т.е. управляет работой данного РО, в соотв. с сигналами, поступающими от регулятора.
По конструктивному исполнению РО подраздел на след. типы:
1) односедельные клапаны (рис.1)
1 – шток;2 – затвор;3 – седло.
Затвор опускается вниз вверх. Он является неуравновешенным, т.к. его перемещению мешает сила давления контрольной среды. Поэтому треб-ся ИМ повышенной мощности.
Данный РО применяется для регулирования расхода чистых, слабозагрязненных и вязких ж-тей.
2) Двухседельный клапан (рис. 2)
 Имеет 2 затвора и 2 седла. Уравновешен от воздействия давления контролируемой среды, что требуется ИМ меньшей мощности, чем в предыдущем и предназначен для регулирования расходов чистых ж-тей, пара, газов и т.д. Прим-тся на трубопроводах диаметром от 15 до 300 мм.
Имеет 2 затвора и 2 седла. Уравновешен от воздействия давления контролируемой среды, что требуется ИМ меньшей мощности, чем в предыдущем и предназначен для регулирования расходов чистых ж-тей, пара, газов и т.д. Прим-тся на трубопроводах диаметром от 15 до 300 мм.
3) Шланговые РО (рис. 3)
 Состоит из участка трубопровода, выполненного из резины или пластмасс, который может зажиматься и меняется кол-во перетекающей ж-ти. Применяется для регулирования сильно загрязненных, волокносодержащих ж-тей. С ограничением температуры данных сред не более 80-90 °С и диаметром трубопровода 15–200 мм.
Состоит из участка трубопровода, выполненного из резины или пластмасс, который может зажиматься и меняется кол-во перетекающей ж-ти. Применяется для регулирования сильно загрязненных, волокносодержащих ж-тей. С ограничением температуры данных сред не более 80-90 °С и диаметром трубопровода 15–200 мм.
4) Заслонковые РО (рис. 4)
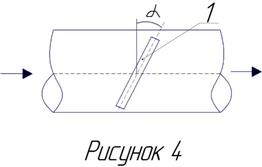 1 – поворотная заслонка.
1 – поворотная заслонка.
 – зависит от пропускной способности.
– зависит от пропускной способности.
Не уравновешена, т.к. на нее действует сила давления контрол. среды, препятствующая ее движению, что требует для ее привода ИМ повышенной мощности. Используется для регулирования расходов разл. сред, в т.ч. суспензий или конц-й до 4%.
5) Шиверные (ножевые) (рис. 5)
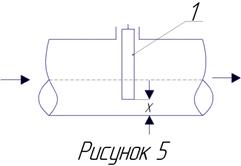 1 – шивер (задвижка)
1 – шивер (задвижка)
Перемещается вверх-вниз и Х – зависит величина регулируемого расхода.
Шивер изготавливают из кислотоустойчивой стали и применяется в трубопроводах с диаметром до 500 мм и при Р контрол. среды не выше 0,4 МПа. Применяются для регулирования расхода различных суспензий. Явл-тсянеуравновеш, поэтому ИМ с повыш. мощностью.
6) Шаровые РО (рис. 6)
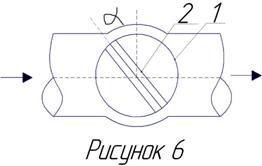 1 – металлический шар;
1 – металлический шар;
2 – цилиндрическая прорезь ч/з которую проходит контролир. среда.
Расход среды зависит от угла поворота . Данный РО является самым надежным при регулировании расхода различных суспензий.
электродвигательные ИМ сост. в осн. их 3-х частей:
– электродвигатель;
– понижающий редуктор;
– выходное устройство, которое предназначено для соед. ИМ с РО.
Данное выходное устройство позволяет осущ. как вращательное движ. РО (в схемах заслонка и шаров. ИМ), так и поступат. движ. РО (в схемах седельный клапан, шланг. и шиверный). для связи ИМ с автоматич. регулятором применяются блоки ручного управления и различные пусковые устройства (теристоры и магнитные пускатели). Например, в качестве блока ручного управления прим. устр-во типа БУ-21. Он имеет переключатель с ручного режима работы на автоматический, а также 2 кнопки управления (1 – больше, 2 – меньше) при ручном управл. пускателями.
В кач-ве пусковых устр-в применяются тиристорные бесконтактные пускатели типа «ПБР-2М». Они примен-тся для управления однофазными конденсаторными электродвигателями с ИМ «МЭО». Так же примен-тся ПБР-ЗА для управления трехфазным асинхронным двигателем, кот. также прим-тся в ИМ типа МЭО.
77. Выбор промежуточных преобразователей (ПП).
Предназначены для преобразования сигнала из одного вида в другой.
Различают входные и выходные ПП. Их выбирают по виду преобразующихся сигналов и по технологическим характеристикам преобразователей.
Например, в условиях производственного помещения пневматический сигнал от датчика, находящегося в данном помещении, необходимо связать/передать на щит управления, где находится электрический регулятор или вторичный прибор. Для согласования 2-х сигналов применяются входные пневмоэлектрические преобразователи.
Примером является прибор типа АСТРА-8М – 8 канальный пневматический преобразователь; преобразует унифицированный пневматический сигнал 20-100 кПа в унифицированный электрический сигнал постоянного тока (0-5) мА или (0-20) мА, или (4-20) мА.
АСТРА-1М – одноканальный пневмоэлектропреобразователь.
Для согласования эл. выходного сигнала автоматического регулятора, установленного на щите, с пневматическим ИМ, наход. в помещении цеха с категорией пожаро- и взрывоопасном, применяются выходные электропневматич. преобразователи. Пример МТМ-810. Он предназначен для непрерывного преобразования унифицир-гоэлектрич сигнала в унифицированный аналоговый пневматический сигнал, т.е. входной сигнал (0-5, 4-20, 0-20 мА) – > выходной сигнал (р= 20-100 кПа).
Класс точности данного преобразователя 0,5 (АТРА-1М такая же).
78. Разработка функциональных схем автоматизации.
ФСА опред-т весь объем автомат-и конкр. ХТП и включают в себя необходимые системы автоматического контроля, управления и регулирования.
Данная схема представляет собой чертеж, на котором с помощью условных обозначений изображается технологическое оборудование, коммуникации, средства автоматизации и связи между отдельными приборами автоматики и технологическим оборудованием.
Не изображаются источники питания переключатели, автоматические выключатели, предохранители, различные монтажные элементы и др подобные (на электрич.), редукторы воздуха, фильтры (на пневматических сх. авт-и).
Технологическое оборудование изображается в виде внешних очертаний. На технологических трубопроводах изображается соответствующая запорная арматура, указывается диаметр трубопроводов и показывается направление потоков сред стрелками.
Приборы и средства автоматизации на данных схемах изображаются в соответствия с ГОСТ 21.208.-13. Согласно данному ГОСТу прим-тся 2 способа изобр-я приборов на функциональных схемах.
1. упрощенный – это изображение приборов и средств автомат-и на технологич. схемах. При данном способе весь комплект системы регулирования обозначается одним условным обозначением, который располагается вблизи места измерения технологического параметра. Первичные преобразователи (Д) не изображаются на данной схеме.
2. развернутый – изображение приборов на функциональных схемах. Каждый прибор, входящий в автоматическую систему контроля или регулирования изображается отдельным условным обозначением. На данной схеме указывается компоновка или место расположения данных приборов. В частности, на технологическом оборудовании изображается Д и ИМ и РО на трубопроводах.
Нижетехнологич-го оборудования в прямоугольнике, который назыв-тся «приборы местные», изображ-тся приборы, которые устанавливаются в пределах цеха на специальных монтажных устройствах (вторичные приборы, промежуточные преобразователи и т.д.).
Ниже прямоугольника в следующем прямоугольнике (щит управления) изображаются приборы, которые устанавливаются на щите управления, в различных пунктах управления (автоматич-е регуляторы, микропроцессорные контроллеры, органы управления).
Методика построения условных обозначений для упрощенного и развернутого способов изображения функциональных схем одинакова. В частности, в верхней части окружности наносятся буквенные обозначения в след. порядке: обозначение измеряемой или регулируемой величины, обознач. уточн. измер. величину и функциональные признаки прибора: IRCSA.В нижней части окружн. обознач. позиции комплекта измер. или регулир. цифрами (при упрощенном способе), а также буквенно-цифр. обозначение каждого прибора измер. или регулир. при развернутом способе изображения схемы.
Щиты и пульты управления условно изображ. прямоугольниками произвольных размеров, достаточных для нанесения на них приборов, которые установлены на них.
Сложные устройства (комплектные устройства, контроллеры, ЭВМ) обозначаются на функцион. схемах также прямоуг. с указанием внутри них типов наимен. приборов.
Функциональные связи между технологическим оборудованием и установленными на нем приборов, а также со средствами автоматизации установл. на щитах и пультах выполняют в однолинейном исполнении. Данные линии подвод. к приборам с любой стороны. При этом допускается пересечение линиями связей технолог. оборуд., но не допускается этими линиями приборов автоматизации. Линии связи проводятся по кратчайшему расстоянию, с минимальным количеством поворотов и пересечений.
В сложных схемах автоматизации, когда вычерчив. линии связи ведут к сложному переплетению, можно разрывать линии связи. При этом оба конца в линии связи номеруются одной и той же арабской цифрой. Номера линий связи размещ. в горизонт. рядах. При этом в нижнем ряде со стороны щитовых приборов номера д.б. в возрастающем порядке. В верхн. ряду номера линий связи м.б. в произвольн. порядке.
Примеры изображения приборов на функциональных схемах:
 упрощенная функциональная схема автоматизации для реактора с мешалкой, в которой регулир. уровень реакционной массы и температура дан. массы. Реактор имеет тепловую рубашку.
упрощенная функциональная схема автоматизации для реактора с мешалкой, в которой регулир. уровень реакционной массы и температура дан. массы. Реактор имеет тепловую рубашку.
В данной схеме регулир. температура осущ. АСР (1), в кот. регулятор воздействует на ИМ и РО изменяет расход пара, поступающего в тепловую рубашку.
АСР уровня (2), в кот. регулятор воздействует на ИМ и РО изменяет расход в-ва на выходе из дан. реактора.
79. Типовые объекты и типовые схемы автоматизации
Все ХТП можно отнести в одну из групп типовых процессов:
1.Гидродинамические
2.Тепловые
3.Массообменные
4.Реакторные
В основе каждой из групп лежат физико-химические закономерности, что предопределяет их свойства как объектов управления. Благодаря этому возможна разработка типовых схем автоматизации объектов на основе детального изучения их свойств, однако одного технологического признака недостаточно для типизации, т.к. одинаковые процессы могут иметь различные аппаратурное оформление (сушка-кип. слой и барабанная, распылительная). При разработке систем автоматизации сложных комплексов как отделения, цеха следует их делить на простые (типовые) объекты, для каждой из которых можно разработать типовую схему автоматизации. Схема автоматизации большинства типовых объектов представляют собой одноконтурные АСР число которых зависит от сложности объекта, кроме того применяют сложные АСР например двухконтурные (каскадные) и комбинированные АСР.
Наибольшее применение получили АСР следующих типовых процессов:
1.АСР гидродинамических процессов. В них входят АСР расхода жидких, газообразных, сыпучих материалов, АСР давления и уровня.