
Данные мех-мы по принципу действия подразделяют на мембранные и поршневые.








А) Мембранные ИМ. По принципу действия данные мех-м подразделяют на нормально открытые (рис.а) – НО, и нормально закрытые (рис.б) – НЗ.
1 – корпус; 2 – затвор; 3 – шток; 4 – пружина; 5 – мембрана.
 Устройство: основой данного мех-маявл-ся мембрана 5 с жестким центром. При подаче давления воздуха Р в верхней части корпуса мембрана прогибается вниз и вместе с ней перемещается вниз 2 и 3. При этом изменяется выходное сечение м/у затвором (подвижная часть) и седлом (неподвижная часть). Т.е поток Fпроходит ч/з данное отверстие м/у затвором и седлом и на выходе данного мех-ма формируется расход F1, кот. зависит от положения затвора относительно седла.
Устройство: основой данного мех-маявл-ся мембрана 5 с жестким центром. При подаче давления воздуха Р в верхней части корпуса мембрана прогибается вниз и вместе с ней перемещается вниз 2 и 3. При этом изменяется выходное сечение м/у затвором (подвижная часть) и седлом (неподвижная часть). Т.е поток Fпроходит ч/з данное отверстие м/у затвором и седлом и на выходе данного мех-ма формируется расход F1, кот. зависит от положения затвора относительно седла.
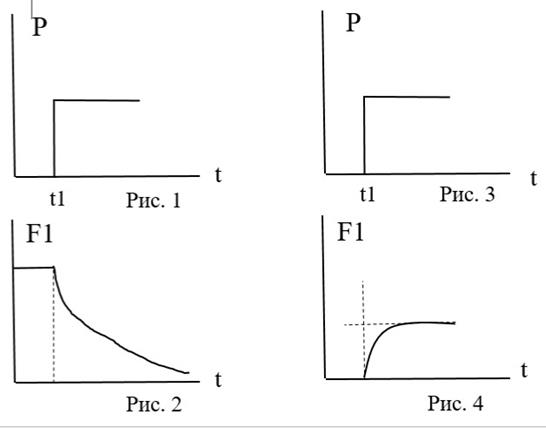
ДляНО мех-мов диаграмма имеет след. вид (рис. 1):
Если давление, поступающее в корпус равно 0, то F1 явл-сяmax.
В момент времени t1 подается давление воздуха Р в верхней части корпуса. Шток и затвор перемещается вниз и уменьшается величина проходного сечения м/у затвором и седлом клапана. Это приводит к уменьшению расхода F1 данного мех-ма (рис.2).
Для НЗ мех-мов диаграмма имеет вид (рис.3). Рис. 3 отражает изменения давления Р в-ха, поступ. в данный клапан. Если Р=0, то клапан полностью закрыт. Расход потока на выходе равен 0. В момент времени t1 в данный клапан поступает давление в-ха Р. При этом мембрана и шток перемещаются вниз. Увелич. площадь проходного сечения м/у затвором и седлом клапана. Это приводит к увеличению расхода F1 на выходе клапана (рис.4).
Данный клапан наз-ся пневматическим регулирующим клапаном.
Динамическая характеристика:
 , Тм – механическая постоянная времени данного клапана, F1 – величина расхода на выходе клапана, k – коэф-т усиления, Р – величина давления в-ха, поступающего в данный клапан.
, Тм – механическая постоянная времени данного клапана, F1 – величина расхода на выходе клапана, k – коэф-т усиления, Р – величина давления в-ха, поступающего в данный клапан.
Решение данного уравнения имеет следующий вид:
Данные ИМ применяются в АСР, когда ИМ устанавливается в помещениях категорий пожаро- и взрывоопасных.
Б) Поршневые пневматические ИМ. Данные мех-мы применяется для привода регулирующих органов в виде шиберы, заслонок и т.д., требующих значительного усилия для перемещения данных РО.
56. Способы математического описания


 Каждый элемент АСР, а также АСР в целом, может рассматриваться как преобразователь, на вход кот подается сигнал Х, который преобразуется в данном элементе и в АСР в выходной сигнал У по схеме: Х У
Каждый элемент АСР, а также АСР в целом, может рассматриваться как преобразователь, на вход кот подается сигнал Х, который преобразуется в данном элементе и в АСР в выходной сигнал У по схеме: Х У
Динамической характеристикой данной АСР является зависимость выходной величины У от входной величины Х ф-ции времени: У=f(Х,t)
Данная характеристика описывается 2-мя способами: 1) Дифференциальные уравнения 2) Передаточные функции