
По конструкции подразделяют на электромагнитный и электродвигательный.








Электромагнитные. По величине перемещения подвижной части механизма (якоря) относительно неподвижной части сердечника подразделяют на короткоходовые (а) и длинноходовые (б).
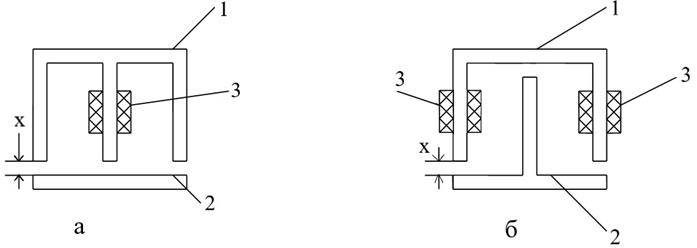
1-сердечник, 2-якорь (подвижная часть), 3-катушка.
Катушка питается напряжением постоянного или переменного тока.
Для короткоходовых: x=2÷5 мм; для длинноходовых: x=5÷15 мм.
Принцип действия: при подаче напряжения на катушку в сердечнике появляется магнитный поток, на основании которого возникает ЭДС, кот. вызывает тяговое усиление м/у якорем и сердечником, кот. равно:
 , где I – ток в катушке; W – число витков; G – магнитная проводимость в зазоре между якорем и сердечником, с кот. связан РО; Х – расстояние между якорем и сердечником.
, где I – ток в катушке; W – число витков; G – магнитная проводимость в зазоре между якорем и сердечником, с кот. связан РО; Х – расстояние между якорем и сердечником.
При этом, якорь притягивается к сердечнику и перемещает, связанный с ним регулирующий орган.
Данный ИМ в АСР применяется в комплекте с релейными или позиционными регуляторами.
54. Электродвигательные исполнительные механизмы
 Наибольшее применение в АСР получили ИМ типа МЭО (механизм электродвигательный оборотный), т.е. угол поворота вала двигателя 0-120°.
Наибольшее применение в АСР получили ИМ типа МЭО (механизм электродвигательный оборотный), т.е. угол поворота вала двигателя 0-120°.
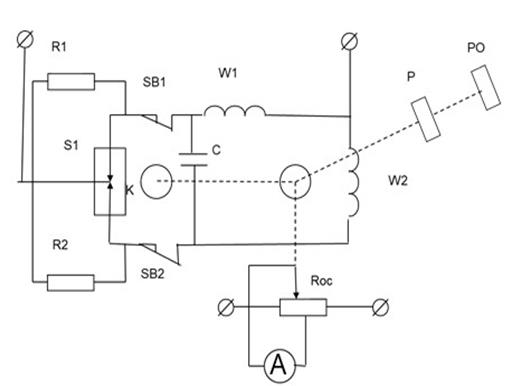
W1, W2 – обмотки двигателя, С – фазодвигающий конденсатор, К – кулачок, SB1 и SB2 - конечные выключатели, Р – редуктор, РО – регулирующий орган, S1 – переключатель, Rос – реостат обратной связи.


 - механические связи, электрические связи.
- механические связи, электрические связи.
Основой данного мех-маявл-ся однофазный асинхронный электродвигатель, в статоре кот. 2 обмотки W1 и W2 под углом 90 °, а также помещен С, обеспечивающий сдвиг фаз м/у данными обмотками, что создает вращающий момент. При вращении ротора с ним механически связан К, кот. в крайних положенияхРмеханически воздействует на конечные выключатели SB1 и SB2, ограничивая угол поворота ротора на 120°.
Выключатель S1 предназначен для реверсирования вращения ротора. Сопротивление R1 и R2 предназначен для уменьшения времени свободного выбега ротора при отключении питания данного ИМ. С валом ротора связан редуктор и РО, кот. приводятся в действие данным ИМ. Также с валом связан движок реостата обратной связи, положение кот. зависит от угла поворота ротора, при этом изменяется напряжение м/у средней точкой реостата обратной связи и движком данного реостата. Это вызывает изменение тока в цепи м/у движком и средней точкой. Данный ток измеряется А, кот. градуируется в % хода регулирующего органа. Данный А называется уровнем положения РО.
Основными параметрами данного мех-маявл-ся:
Максимальный момент на валу двигателя (Мmax);
Тmax – время полного хода ИМ при повороте его на max уровень. Это наз-ся мощностью данного ИМ:
 – КПД ИМ, 603 – переводной коэф-т.
– КПД ИМ, 603 – переводной коэф-т.
По величине N выбирается необходимый тип ИМ.
55 Пневматические исполнительные механизмы