
λ – относительное регулирующее воздействие на выходе из объекта.








Предположим, что данное воздействие на входе и выходе одинаковое.
 В момент времени τ1m′>m = µ′ на выходе. Через время τ = l (эль)/ υ, µ′ = λ′.
В момент времени τ1m′>m = µ′ на выходе. Через время τ = l (эль)/ υ, µ′ = λ′.
Поэтому динамическая характеристика данного объекта имеет вид:
λ = µ(τ1 – τ)
45. Сложные регулируемые обьекты.
Данные объекты содержат две емкости, способны запасать тепловую и материальную энергию и разделены сопротивлением. В переходном процессе происходит обмен энергиями между данными емкостями через разделение их сопротивлениями.
Пример: кожухотрубчатый теплообменник
1 емк. – греющая среда
2 емк. – нагреваемая среда, разделенная стенками трубопровода.
В переходном процессе происходит теплообмен между данными емкостями через стенку.
T1 – постоянная времени 1 емкости
T2 – постоянная времени 2 емкости.
Динамическая характеристика данного объекта имеет следующий вид:

если (t1 +t2)2> 4t1t2, то решение данного уравнения имеет следующий вид:

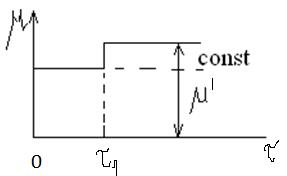
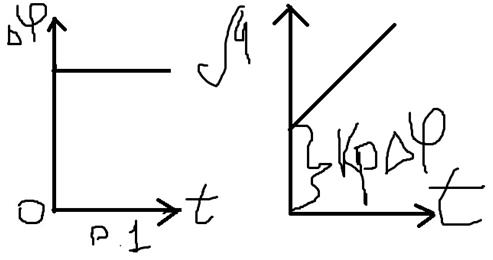
Данный объект обладает чистым запаздыванием τ. При появлении на входе данного объекта регулирующего воздействия µ, регулируемая величина φ изменяется не сразу, а через время t.
Примем µ = const:
Коб*µ - установленное значение регулируемой величины
τn – время переходного запаздывания
τз = τn + τ – общее время запаздывания.
Примерами являются:
1 кожухотрубчатый теплообменник, как объект регулирования,
2 верх ректификационной колонны,
3 химические реакторы, снабженные тепловыми рубашками.
46. Автоматические регуляторы. Классификация автоматических регуляторов.
В АСР датчик непрерывно измеряеттекущее значение регулируемой величиныφт.Воздействие регулятора на объект регулирования может быть различным, в зависимости от характера воздействия АР делятся на АР: прерывистого действия и непрерывного действия.
Регуляторы прерывного действия делятся: импульсные(Данные регуляторы применяются на объектах подверженных частым, но не сильным возмущениям.), релейные(Данные регуляторы применяются для регулирования стат-х объектов с наибольшим и редким возмущением свойственна статическая погрешность измерения.), позиционные(просты по конструкции используются для регулирования статических объектов подверженных небольшим возмущениям.).
47. Регуляторы прерывистого действия (релейные, позиционные)
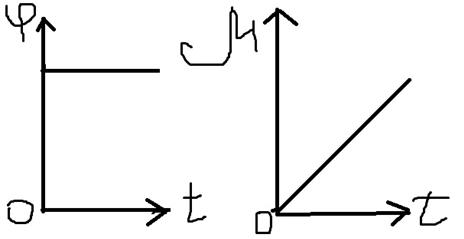
а) Импульсные.. Диаграмма приведена на рисунках:
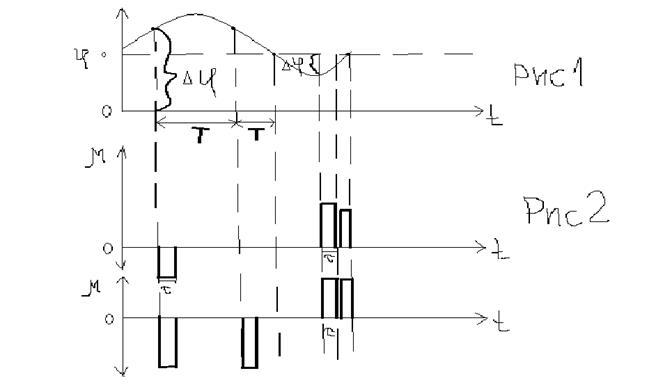
Рис.1- изменения ∆φ ф-ции времени∆φ=φз–φТ
С целью устранения  регулятор действует на объект импульсами через равные промежутки времени, а их амплитуда пропорциональна . Рис.2 μ= f (∆ φ ), τ = const . Рис.3 τ= f (∆ φ ), μ = const .
регулятор действует на объект импульсами через равные промежутки времени, а их амплитуда пропорциональна . Рис.2 μ= f (∆ φ ), τ = const . Рис.3 τ= f (∆ φ ), μ = const .
Данные регуляторы применяются на объектах подверженных частым, но не сильным возмущениям.
б) Релейные регуляторы (РР).
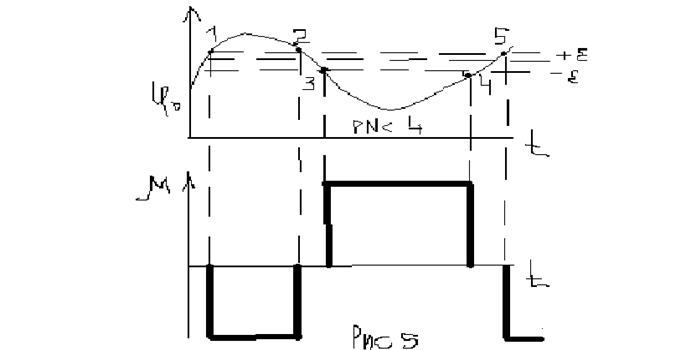
В пределах зоны чувствительности регулятор не воспринимает изменение . При превышении >(±ε) зоны чувствительности, регулятор срабатывает, при уменьшении меньше чем (±ε) регулятор выключается.
Данному регулятору свойственна зона нечувствительности, т.е. то значение ∆φ кот регулятор не воспр-ет ∆φ (+ε, -ε). В этой зоне μ=0 регулирующее действие отсутствует. В т. 1 ∆φ превышает зону нечувствительности, и регулятор вырабатывает регулир. воздействие μ. В т. 2 ∆φ попадает в зону нечувствительности, кот. находиться м/у т. 2 и т. 3.
В т. 3 ∆φ превышает зону нечувствительности, регулятор оказ-ет регул-ее действие.
Данные регуляторы применяются для регулирования стат-х объектов с небольшим и редким возмущением свойственна статическая погрешность измерения.
в) Позиционные регуляторы (ПР)
Это разновидность релейных регуляторов, но в отличии от них имеют два устойчивых состояния. Кривое устойчивое состояние:
∆φ превышает верхний предел регулирования +∆
Второе: ∆φ меньше нижнего предела регулирования -∆
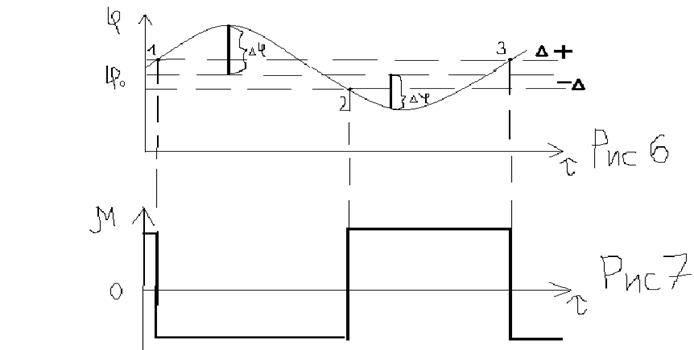
В т.1 ∆φ превышает верхний предел +∆ и регулятор меняет позицию.
В т.2 ∆φ меньше-∆, регулятор снова меняет свою позицию и т.д.
В данном случае воздействие на объект является полным. Позиционные регуляторы просты по конструкции используются для регулирования статических объектов подверженных небольшим возмущениям. В АСР используются быстродействующие исполнительные механизмы. Данные регуляторы поддерживают не заданное значение, а с некоторой погрешностью (электромагниты
48. Регуляторы непрерывного действия
В АСР датчик непрерывно измеряет значение регулир величины, регулятор также непрерывно возд-т на объект регулирования. И хар-р возд-я определяется з-ном регулирования , кот вырабатывает регулятор.
Закон регулирования — зависимость выходной величины регулятора (регулирующее воздействие μ) от входной величины (функции рассогласования) μ=f(∆φ).
Регуляторы непрерывного действия по закону регулирования: 1) статические (пропорциональные, П - регуляторы);
2) астатические (интегральные, И - регуляторы);
3) изодромные (пропорционально-интегральные, ПИ - регуляторы);
4) изодромные с предварением (пропорционально-интегрально-дифференциальные, ПИД - регуляторы)
49. Статические регуляторы (П-регуляторы)
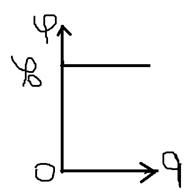
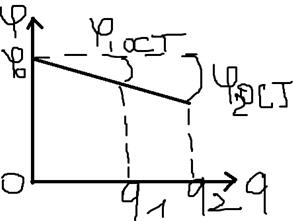 Статическое регулирование — при котором в установившемся режиме работы АСР каждому значению регулирующего воздействия соответствует определенное значение регулируемой величины в ОР, зависящее от величины нагрузки, действующей на объект регулирования. Статическая характеристика:
Статическое регулирование — при котором в установившемся режиме работы АСР каждому значению регулирующего воздействия соответствует определенное значение регулируемой величины в ОР, зависящее от величины нагрузки, действующей на объект регулирования. Статическая характеристика:
φ0 ‒ заданное значение регулируемой величины, q‒нагрузка, действующая на объект регулирования, φост. –остаточная погрешность. μ=f(∆φ).
Закон регулирования: μ= kp ∆φ
kp—коэф. усиления регул-ра.
φост =1/ kp. , φост зависит от kp. kp.-параметр настройки регулятора.
Динамич. хар-ка
П
Пусть ∆φ=const.
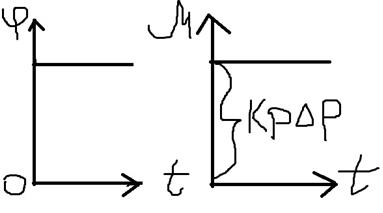 При появлении на входе регулятора ∆у, регулятор мгновенно без запаздывания вырабатывает регулирующее воздействие (резко изменяется положение РО), что сокращается время переходящего процесса в АСР.
При появлении на входе регулятора ∆у, регулятор мгновенно без запаздывания вырабатывает регулирующее воздействие (резко изменяется положение РО), что сокращается время переходящего процесса в АСР.
Достоин-ва регул-ра: хорошие динамич. св-ва
Недостатки: плохие статич. св-ва, наличие статической ошибки зависит от нагрузки.
Область применения: для регулир-я объектов ,допускающ. статич. ошибку регулирован. и подвержен. небольш. и редким возмущениям.
50. Астатические регуляторы (интегральные) И-регуляторы
Астатическим называется регулирование, при котором при изменении входной величины регулятора ∆φ, регулятор вырабатывает регулирующее воздействие μ изменяется с постоянной скоростью, пропорцинальной изменению ∆φ. При этом обеспечивается заданное значение регулируемой величины в ОР, не зависит от нагрузки действующей на объект (в установленном режиме АСР).
Статическая характеристика: 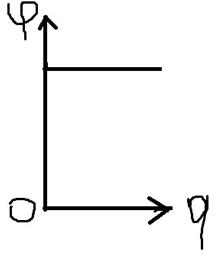 Закон регулирования:μ=(1/Tим)∫∆φdt
Закон регулирования:μ=(1/Tим)∫∆φdt
Tим—время полного ходаисполнительного механизма при макс. нагрузке, действующей на ОР (время интегрирования)
Динамическая хар-ка: При появлении на входе регулятора ∆φ регулятор вырабатывает μ, изменяется с постоянной скоростью. При этом значительное регулирование величины в установившемся режиме не зависит от положения РО. Такой характер изменения μ приводит к некоторому увеличению времени переходного процесса.
 Достонства: хорошие статическиесвойства.
Достонства: хорошие статическиесвойства.
Недост.: плохие динамич. св-ва, связанные с медленным изменением μ; данные регуляторы не применяются для регулирования астатич. объектов, т.к. работа АСР в данн. случ. будет неустойчива.
Данные регуляторы применяются для регулирования статических объектов, подверженных небольшим и редким возмущениям без остаточной погрешности.
51. Изодромные регуляторы (ПИ-регул-ры)
Изодромный-равнобегущий. Закон регулирования μ=Кp(∆φ+1/Tиз∫∆φdt)
Tиз—время изодрома, время за которое удваивается величина П-составляющей данного рег-ра.
Данный регулятор обладает хорошими статическими и динамическими свойствами.
Статическая характеристика:
 Принимаем ∆φ=констант., μ=Кp(∆φ+∆φ*t/Tиз),
Принимаем ∆φ=констант., μ=Кp(∆φ+∆φ*t/Tиз),
Динамическая характеристика:
еслиt=Tиз, то μ=2Кp*∆φ
При появлении ∆φ на входе регулятора, мгновенно срабатывает П-составляющая, и регулятор вырабатывает регулирующее воздействие Кр*Δφ (т.е. происходит статическое регулирование со статической погрешностью при t=0). Затем регулятор вырабатывает U-составляющую μ начинает изменяться с постоянной скоростью, устраняя статическую погрешность. При этом величина μ удваивается для П-составляющих при Тиз.
 Применяется для регулированияобъектов, подверженных частым значительным возмущениям.
Применяется для регулированияобъектов, подверженных частым значительным возмущениям.
52. ПИД-регуляторы
Закон регулирования
Тд-время предворения +- бывают прямое и обратное
dφ∕dt- характеризует скорость изменения регулируемой величины, и является входом регулятора, поэтому регулятор предвидит, на какую величину и в каком направлении может изменяться данная входная величина и оказывать необходимое регулирующее воздействие μ.
∆φ=const
Диаграмма работы:
При появлении на входе регулятора Δφ (рис.1) мгновенно срабатывает Д-составляющая, при этом резко ↑μ, до предела изменяется положение регулирующего органа.Приt>0, срабатывает П-составляющая и И-составляющая. Следовательно μ изменяется с постоянной скоростью.
При этом ↓время переходного процесса вАСР при регулировании любых объектов, подверженных значительным и частым возмущениям и обладающим большим временемчистого запаздывания.
+хорошие статические свойства
+хор. Динамические свойства
53.Исполнительный механизм. Электромагнитные исполнительные механизмы
ИМ предназначен для исполнения регулирующего воздействия, выработанного регулятором для привода РО.
По роду используемой энергии: - электрические, -гидравлические, -пневматические.
По роду тока подразделяют на электрические механизмы постоянного и переменного тока.