
40. Классификация систем автоматического регулирования








1.По виду воздействующего воздействия  :
:
Стабилизирующая в которой =const
Программные АСР, где изменяется по заданной временной программе = 
Следящие АСР, где величина изменяется в соответствии с изменением какой либо др. величиной
Оптимизирующая АСР, где величина вырабатывается на оптимальном уровне и поддерживается на этом уровне с одним регулятором.
2.По принципу действия: а) Аср по отклонению
 Б) АСР по возмущению.
Б) АСР по возмущению.
АСР по отклонению: обязательно присутствует ошибка регулирования ∆φ и только тогда АСР оказывает регулирующее воздействие с целью компенсации ∆φ (недостаток). Достоинство: ∆φ следствие действия на ОР практически всех возможных возмущающих воздействий (даже неконтролируемых).
АСР по возмущению.В этих АСР компенсируется только одно возмущ. воздействие которое появляется на выходе объекта регулирования и этот процесс препятствует появлению  .
.
Достоинство:Сравнительная быстрота воздействия на объект регулирования что вызывает улучшение качества процесса регулирования.
Недостатки:Если на объект действует много возмущений то  будет иметь значительное отклонение , поэтому в наиболее ответственных случаях применяют комбинированные АСР которые реализуются по возмущению и отклонению.
будет иметь значительное отклонение , поэтому в наиболее ответственных случаях применяют комбинированные АСР которые реализуются по возмущению и отклонению.
41. Объекты регулирования
От свойств ОР зависит характер работы всей АСР. В частности, для выбора типа регулятора АСР и определения параметров его настроек необходимо определить динамическую характеристику ОР.
Динамическая характеристика ОР — изменение во времени регулируемой величины выходного параметра объекта (функции времени) при изменении входной величины.
φ=f(t) μ=const
В химической технологии ОР классифицируют по:
1) Физико-химическим процессам
2) Конструктивному оформлению
3) Температурному режиму
4) Структуре потоков и т.д.
По динамическим характеристикам:
1 одноемкостные статические объекты
2 одноемкостные астатические объекты
3 объекты чистого запаздывания
4 двухемкостные статические объекты
5 двухемкостные астатические объекты
42.Одноемкостные статические объекты.
Емкость – способность объекта запасать материальную и тепловую энергию.
 Статическими называются объекты регулирования, у которых при изменении входной величины после окончания переходного процесса в установившемся режиме работы объекта формируются установившееся значение выходной или регулируемой величины. При этом регулируемая величина влияет на значениевходной величины, т.е. данные объекты обладают свойством самовыравнивания.
Статическими называются объекты регулирования, у которых при изменении входной величины после окончания переходного процесса в установившемся режиме работы объекта формируются установившееся значение выходной или регулируемой величины. При этом регулируемая величина влияет на значениевходной величины, т.е. данные объекты обладают свойством самовыравнивания.
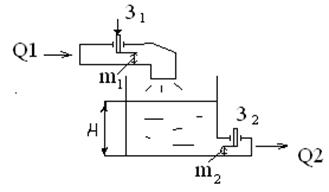
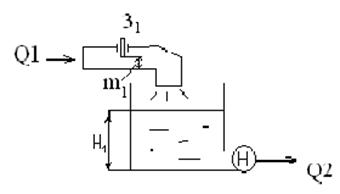
На притоке жидкости установлена задвижка З1 в положении m1, величина потока на входе Q1.На стоке установлена задвижка З2 в положении m2, величина потока на входе Q2. В установившемся режиме Q1=Q2 Увеличение закрытия З1 до значенияm1‘>m1, тогда Q1’>Q1, при этом увеличится уровень в резервуаре и увеличивается гидростатический уровень в нем, величина Q2’>Q2 и уровень Н’1=соnst, но Н’1>H. Изменение уровня описывается уравнением:  ; Рассмотри относительное изменение Q1 отm1:
; Рассмотри относительное изменение Q1 отm1:
 ;
;  ;
;
Рассмотрим относительное изменение Q2 от Н:
 ;
;  ;
;  — динамическая характеристика данного резервуара как ОР уровня при регулировании на входе и самовыравнивании на стоке.
— динамическая характеристика данного резервуара как ОР уровня при регулировании на входе и самовыравнивании на стоке.
для получения уравнения в общем виде необходимо все величины записать в относительных единицах.  ,
,  ,
,  , получаем
, получаем  , учитывая что
, учитывая что  , характеристика т.к. З1 линейна
, характеристика т.к. З1 линейна 
 ,
,  ,
,
 ,
,  , окончательный вид
, окончательный вид 
43. Одноемкостные астатические объекты
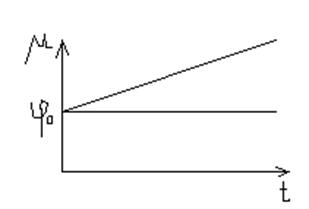
Астатический — объект, у которого при изменении входящей величины (регулирующего воздействия), выходящая величина (регулируемая величина) изменяется с постоянной скоростью не приходя к новому установленному значению.
 Примером является резервуар, в котором регулируется уровень жидкости, при этом на стоке устанавливается насос постоянной производительности, на входе РО.
Примером является резервуар, в котором регулируется уровень жидкости, при этом на стоке устанавливается насос постоянной производительности, на входе РО.
Q2=соnst, предполагаем что m1‘>m1, при этом Q1’>Q1 значит Н1 начнет увеличиватся. Данный объект не обладает свойством самовыравнивания, для получения его динамической характеристики используем уравнение для статического объекта:
 , пусть ρ=0:
, пусть ρ=0:  –динамическая характеристика, Решим данное уравнение:
–динамическая характеристика, Решим данное уравнение:  , интегрируем
, интегрируем  , принимаем
, принимаем  , получаем
, получаем  ,
,
φ0— установившееся значение регулируемой величины.
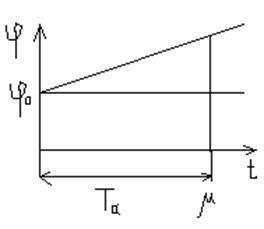 Если t=Taтогда
Если t=Taтогда 
Та — время, за которое φ станет равным μ.
44. Объекты чистого запаздывания
Пример: конвейер, перемещающий сыпучий материал из бункера в аппарат.
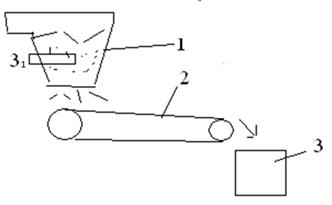 1 – исходный бункер
1 – исходный бункер
2 – конвейер, рабочая длина l, лента перемещается с линейной скоростью
3 – приемный бункер
З1 – заслонка
В исходном бункере находится заслонка З и степень открытия m определяет расход данного материала на конвейер.
µ - относительное изменение положения задвижки З и относительное регулирующее воздействие на входе.