
Системы автоматического управления.








(САУ) – комплекс устройств, предназначенный Для автоматического Изменения одного или нескольких Параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы) либо оптимизирует определённый Критерий качества управления (системы экстремального Регулирования, оптимального Управления). При значит. Изменениях параметров объекта управления и хар-к возмущений и помех применяются самонастраивающиеся системы. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, к-рые предназначены также для компенсации внеш. Возмущающих воздействий, стремящихся нарушить норм. Функционирование объекта. Управляющие воздействия вырабатываются устройством управления.
Объектом системы управления могут быть как технические объекты, так и люди. Объект системы управления может состоять из других объектов, которые могут иметь постоянную структуру взаимосвязей.
САУ выполняют функции автоматического управления, регулирования, контроля и защиты процессов, обеспечивающих безаварийную и длительную работу различного технологического оборудования.
Что такое скользящий режим?
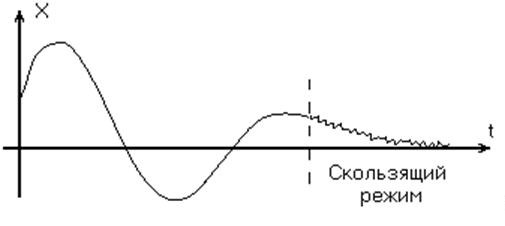
Скользящий режим — вид движения динамической системы, когда её правая часть разрывна и точка «скользит» по кривой разрыва.
Физический смысл скользящего режима: на линии переключения реле должно переключатся, поэтому физически скользящий режим заключается в бесконечно быстрых переключениях реле, происходящих с бесконечно большой частотой и вызывающих бесконечно малые изменения выходной величины. Практически эти колебания имеют конечную частоту, поэтому скользящий режим фактически реализуется не в виде плавного скольжения по линии переключения, а виде вибраций малой амплитуды и большой частоты вокруг линии переключения.
На практике скользящий режим чаще всего случается, когда налажено автоматическое управление с разрывным выходом. Простейшая задача управления — поддержание температуры в комнате включением-выключением обогревателя — также работает на скользящем режиме, и в идеальных условиях (меряем температуру вдали от обогревателя с абсолютной точностью) обогреватель будет включаться-выключаться с высокой частотой. Скользящие режимы приводят к усиленному износу деталей и повышенному расходу энергии.
Поскольку в реальных системах управления бывает запаздывание и гистерезис, скользящий режим переходит в автоколебания (обогреватель начинает ритмично включаться-выключаться).
Принцип действия регулятора скользящей системы заключается в выборе ускорения, с которым система будет двигаться до момента следующего переключения. Между переключениями движение в системе проходит равноускоренно с попеременным изменением знака ускорения. В состав регулятора входят следующие элементы:
· вычислитель ошибки;
· вычислитель значения функции, описывающей линию переключения;
· вычислитель скорости изменения ошибки;
· вычислитель отклонения скорости изменения ошибки от соответствующего значения функции, описывающей линию переключения;
· вычислитель знака отклонения скорости;
· вычислитель величины управляющего воздействия. При использовании цифрового способа обработки информации каждый из вычислителей реализуется очень просто и эффективно. Последовательность вычислений соответствует последовательности, с которой они перечислены
Скользящие режимы в релейных системах:
Скользящим режимом называется режим работы релейной системы, характеризующийся колебательным движением изображающей точки вдоль линии переключения. Чем сильнее воздействие производной в цепи обратной связи, тем больше поворачиваются линии переключения реле против часовой стрелки. При этом интенсивность затухания переходного процесса возрастает. В том случае, когда в точке переключения угол наклона линии переключения становится равным наклону или меньше угла наклона касательной к фазовой траектории, по которой движется изображающая точка после переключения реле, возникают условия существования скользящего режима
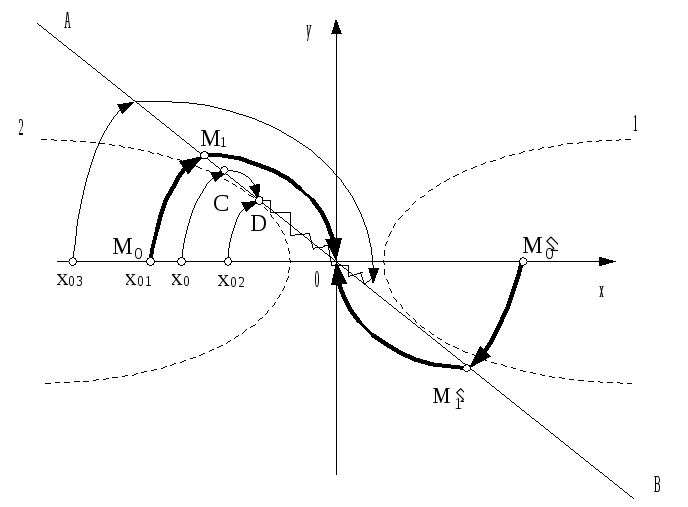
При начальном положении изображающей точки (x02, 0) после ее прихода по траектории типа 1 в точку на линии переключения D сразу начинается скользящий режим. При начальном положении изображающей точки (x03, 0) скользящий режим имеет место после переключения реле, когда изображающая точка скользит по линии переключения AB в четвертом квадранте. В последнем случае переходный процесс имеет перерегулирование.