
Выражение (2.4) называется электромеханической (или скоростной) характеристикой двигателя.








Если в процессе работы электрической машины значения напряжения, потока возбуждения и сопротивления остаются неизменными, то
 (2.5)
(2.5)
где  - частота вращения идеального холостого хода двигателя при I = 0;
- частота вращения идеального холостого хода двигателя при I = 0;  i - коэффициент жесткости электромеханической характеристики, = U/сФ;
i - коэффициент жесткости электромеханической характеристики, = U/сФ;
i = (rя + Rдоб)/cФ. (2.6)
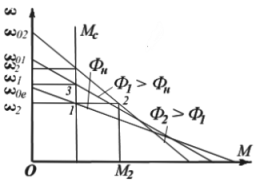
Электромеханическая характеристика - это прямая линия 1, которая проходит через две точки (рис.2.1):
координаты первой точки: частота вращения  равна нулю, ток равен пусковому
равна нулю, ток равен пусковому  .
.
координаты второй точки: ток равен нулю, частота вращения = о. Из курса электрических машин известно, что значение электромагнитного момента
М = сФI. (2.7)
Подставим значение тока из выражения (2.7) в (2.4):
= U/сФ - (rя + Rдоб)М/(сФ)2. ( 2.8 )
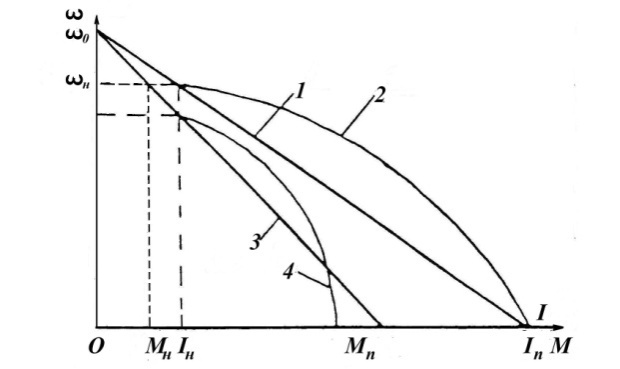
Рис.2.1.Электромеханические - 1, 2 и механические – 3, 4 характеристики двигателя постоянного тока параллельного возбуждения.
Это выражение представляет механическую, характеристику двигателя. При постоянстве U, ФU и Rдоб , уравнение (2.8) можно записать в виде
= о - МM. (2.9)
где М - жесткость механической характеристики,
М = ( rя + Rдоб)/(cФ)2
График механической характеристики 3 представлен на рис 2.1.
В области значительных нагрузок (I > IH) в электрической машине начинает проявляться реакция якоря, и график 2 реальной электромеханической характеристики будет иной. При учете реакции якоря и механические характеристики двигателя несколько изменяются [4].
Механическая и электромеханическая характеристики являются естественными, если U = UHДВ; Rдоб = 0: Ф = ФНОМ . Их. уравнения имеют следующий вид:
 (2.10)
(2.10)
 (2.11)
(2.11)
На практике необходимо знать характер изменения частоты вращения на валу от момента двигателя. График изменения частоты вращения и момента строят следующим образом [18]. Вначале определяют номинальный момент на валу, соответствующий номинальной частоте вращения:
 . (2.12)
. (2.12)
Номинальный электромагнитный момент равен
 (2.13)
(2.13)
Разность Мнэ и Мнв дает момент холостого хода. Этот момент обусловлен потерями самого двигателя на перемагничивание стали якоря, вентиляцию и на трение в подшипниках:
Мхх = Мнэ - Мнв . (2.14)
Если подставим значение  в выражение (2.11), получим частоту вращения холостого хода. При работе на естественной характеристике частота вращения двигателя обычно изменяется незначительно, следовательно, Мхх можно считать постоянным.
в выражение (2.11), получим частоту вращения холостого хода. При работе на естественной характеристике частота вращения двигателя обычно изменяется незначительно, следовательно, Мхх можно считать постоянным.
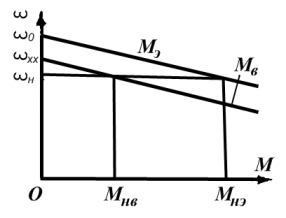
Рис.2.2. Зависимость угловой скорости двигателя постоянного тока независимого возбуждения от электромагнитного момента и
момента на его валу.
Соединив точки (Мнв и  ) и (М = 0, и
) и (М = 0, и  ), получим график изменения частоты вращения на валу двигателя от момента (рис.2.2). Для построения естественных электромеханической и механической характеристик двигателя постоянного тока независимого (параллельного) возбуждения необходимы
), получим график изменения частоты вращения на валу двигателя от момента (рис.2.2). Для построения естественных электромеханической и механической характеристик двигателя постоянного тока независимого (параллельного) возбуждения необходимы
РH - номинальная мощность двигателя, кВт;
UH - номинальное напряжение двигателя, В;
IH - номинальный ток двигателя, А;
 - номинальная частота вращения вала,
- номинальная частота вращения вала,  .
.
Иногда в паспортных данных отсутствует значение номинального тока двигателя, дается номинальный КПД двигателя  .
.
Для практических целей обычно строится не вся механическая характеристика, а часть, соответствующая изменению момента от нуля до Мном (иногда до 2,5 Мном) В этой части механическая характеристика линейна. Для ее построения достаточно двух точек с координатами: 
При расчете координат этих точек последовательно определяем
1) номинальный КПД двигателя
 (2.15)
(2.15)
если известен к.п.д., определяем ток:

2) сопротивление якорной цепи
3) номинальную угловую частоту вращения
4)постоянный коэффициент
 ;
;
5)координаты первой точки

6) координаты второй точки
МНЭ = сФHIHMНВ = РН103/  ;
; 
7) момент холостого хода
МХХ = МНЭ - МНВ;
8) уравнение естественной характеристики для
электромагнитного момента
 = UН/сФН - МrЯ/(сФн)2.
= UН/сФН - МrЯ/(сФн)2.
Приравниваем М = МХХ и определяем
 = UН/сФН - rЯ М / (сФн)2 МВ = 0
= UН/сФН - rЯ М / (сФн)2 МВ = 0
По данным пунктов 5 и б строим график  = f(MЭ), а пунктов б и 9 - график
= f(MЭ), а пунктов б и 9 - график  = f(Мв) (рис.2.2). График
= f(Мв) (рис.2.2). График  = f(Мв) можно получить сразу после построения
= f(Мв) можно получить сразу после построения  = f(MЭ), не проводя вычислений по пунктам 7, 8, 9. Для этого необходимо отложить М при номинальной частоте вращения и через полученную точку провести прямую, параллельную графику электромагнитного момента. Пересечение вновь построенной прямой с осью частоты вращения дает
= f(MЭ), не проводя вычислений по пунктам 7, 8, 9. Для этого необходимо отложить М при номинальной частоте вращения и через полученную точку провести прямую, параллельную графику электромагнитного момента. Пересечение вновь построенной прямой с осью частоты вращения дает  ХХ.
ХХ.
При необходимости исследовать характер изменения момента двигателя на всем диапазоне изменения частоты вращения от нуля до  , то координаты третьей точки:
, то координаты третьей точки:
 ; МП = сФНUH/rЯ ; IП = UH/rЯ
; МП = сФНUH/rЯ ; IП = UH/rЯ
По полученным данным строят график механической
характеристики.
2.2. Искусственные механические и электромеханические
характеристики ДПТ НВ
Механические и электромеханические характеристики становятся искусственными, если UДВ  UН или ФДВ = ФН или Rдоб > 0. Изменение значения напряжения или потока возбуждения машины, увеличение добавочного сопротивления в цепи якоря могут возникнуть при пуске, а также при регулировании частоты вращения двигателя. Изменение U, Ф или Rдоб может быть обусловлено и отдаленностью источника питания от электрического двигателя. При больших токах нагрузки в этом случае возникает значительное падение напряжения в сети, что приводит к снижению напряжения на якоре и потока возбуждения машины. Рассмотрим характеристики двигателя постоянного тока при изменении напряжения, потока и добавочного сопротивления. Грачев Г.М. [4] рекомендует рассматривать при этом три случая.
UН или ФДВ = ФН или Rдоб > 0. Изменение значения напряжения или потока возбуждения машины, увеличение добавочного сопротивления в цепи якоря могут возникнуть при пуске, а также при регулировании частоты вращения двигателя. Изменение U, Ф или Rдоб может быть обусловлено и отдаленностью источника питания от электрического двигателя. При больших токах нагрузки в этом случае возникает значительное падение напряжения в сети, что приводит к снижению напряжения на якоре и потока возбуждения машины. Рассмотрим характеристики двигателя постоянного тока при изменении напряжения, потока и добавочного сопротивления. Грачев Г.М. [4] рекомендует рассматривать при этом три случая.
Первый случай. U = UH , Ф =  Rдоб > 0 частота вращения идеального холостого хода двигателя параллельного (или независимого) возбуждения при введении в цепь якоря добавочного сопротивления остается неизменной:
Rдоб > 0 частота вращения идеального холостого хода двигателя параллельного (или независимого) возбуждения при введении в цепь якоря добавочного сопротивления остается неизменной:
При введении в цепь якоря добавочного сопротивления снижается. пусковой ток, следовательно, и пусковой момент двигателя
IП = UН/(rя + Rдоб); МП = UН сФ/(rя + Rдоб).
Графики механической характеристики приведены на рис.2.3. Из графиков видно, чем больше значение добавочного сопротивления, тем мягче характеристики. С ростом RДОБ растет падение напряжения на сопротивлениях (rДВ + RДОБ). следовательно, на якорь двигателя приходится меньшее значение напряжения. С уменьшением напряжения на якоре (при постоянстве потока) снижается частота вращения двигателя.
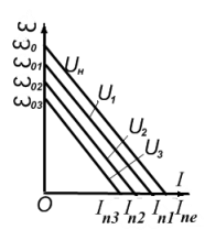
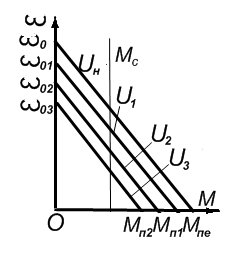
Второй случай. Ф = ФН0М, RДОБ = 0, U < UH
В электрических машинах постоянного тока напряжение на якоре можно изменять в пределах  (т.е. только в сторону понижения от номинального значения).
(т.е. только в сторону понижения от номинального значения).
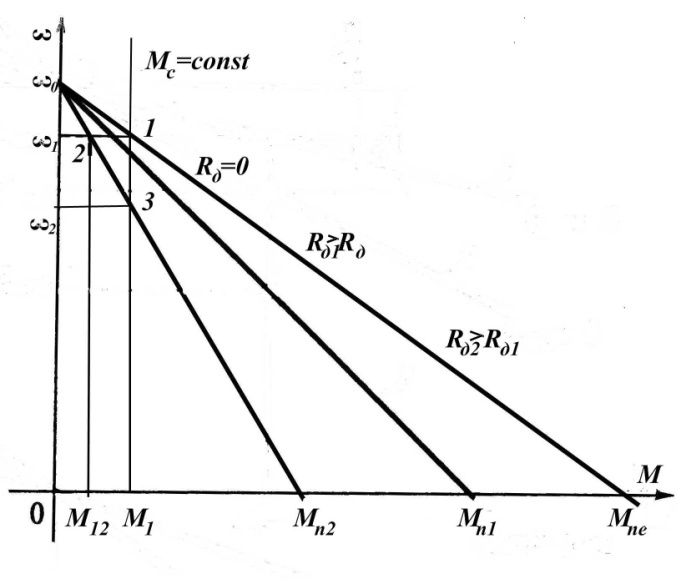
Рис. 2.3. Характеристики двигателя постоянного тока параллельного возбуждения при изменении сопротивления в цепи якоря:
а - электромеханические ; б – механические.
При уменьшении напряжения на якоре уравнения искусственных характеристик имеют вид:
 , (2.16 )
, (2.16 )
 (2.17 )
(2.17 )
Таким образом, значения жесткости механической и электромеханической характеристик не изменяются. Это значит, что искусственные характеристики располагаются параллельно естественным.
Координата первой точки
 , М = 0 , I = 0.
, М = 0 , I = 0.
С уменьшением напряжения на якоре пропорционально изменяется и значение частоты вращения идеального холостого хода:
а б
Рис.2.4. Характеристики двигателя постоянного тока параллельного возбуждения при изменении напряжения на якоре:
а – электромеханические; б - механические.
Координаты второй точки МПИ, IПИ также изменяются пропорционально приложенному к якорю напряжению. Характеристики для UH < U1 < U2 < U3 и т.д. изображены на рис.2.4.
Из графика рис.2.4 и уравнения (2.17 ) видно, что при одном и том же моменте двигателя при уменьшении напряжения частота вращения двигателя уменьшается с  до
до  и т.д.
и т.д.
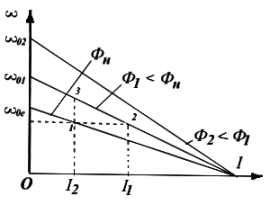
Третий случай U = UH , RДОБ = 0, Ф < ФН
Рабочая точка на кривой намагничивания двигателя выбирается на перегибе, поэтому поток Ф можно только понижать. Следует рассматривать условие, когда Ф < ФН
Значение частоты вращения идеального хода растет:
Пусковой ток остается постоянным, а момент снижается:
 I =
I =  ; М = с Ф U/ .
; М = с Ф U/ .
Уравнения электромеханической и механической характеристик:
 ; (2.18)
; (2.18)
 (2.19)
(2.19)
Таким образом, при ослаблении потока двигателя до какого-то значения частота вращения возрастает. Действительно, при ослаблении потока возбуждения до Ф1 < ФН уменьшается ЭДС якоря и возрастает ток:
I1 = (UH - cФ1  е)/rЯ (2.20)
е)/rЯ (2.20)
Возрастает и момент двигателя. При ослаблении потока на частоте вращения  момент двигателя М2 больше МС и двигатель начинает разгоняться до частоты вращения
момент двигателя М2 больше МС и двигатель начинает разгоняться до частоты вращения  , где МС будет равен моменту двигателя. Следует отметить, что значение тока I3 на частоте вращения
, где МС будет равен моменту двигателя. Следует отметить, что значение тока I3 на частоте вращения  больше, чем на , т.к. МС = const.
больше, чем на , т.к. МС = const.
График изменения тока и момента в зависимости от частоты вращения при ФН > Ф1 > Ф2 и т.д. приведен на рис.2.5.
а б
Рис.2.5. Характеристики двигателя постоянного тока параллельного возбуждения при изменении магнитного потока возбуждения:
а – электромеханические; б – механические.
2.3. Тормозные режимы двигателя постоянного тока
независимого возбуждения
У двигателя постоянного тока независимого (параллельного) возбуждения возможны следующие тормозные режимы: рекуперативный, противовключением и динамическое торможение.
Рекуперативный тормозной режим у двигателя постоянного тока возникает в том случае, когда со стороны рабочей машины приложен момент, действующий в ту же сторону, что и электромагнитный. Под действием этих моментов якорь начинает разгоняться. При частоте вращения  приложенное к якорю напряжение сети уравновесится ЭДС двигателя, т.е. UH = ЕДВ. Ток якоря и электромагнитный момент двигателя при этой частоте вращения равны нулю. Увеличение частоты вращения выше приводит к тому, что ЭДС будет больше напряжения сети, а ток и электромагнитный момент поменяют свой знак (направление). Двигатель переходит в тормозной режим, называемый рекуперативным. Рекуперация означает преобразование двигателем постоянного тока механической или запасенной во вращающихся частях кинетической энергии обратно в электрическую и отдачу ее в сеть. Таким образом, рекуперативный тормозной режим в рассматриваемых машинах возможен, если
приложенное к якорю напряжение сети уравновесится ЭДС двигателя, т.е. UH = ЕДВ. Ток якоря и электромагнитный момент двигателя при этой частоте вращения равны нулю. Увеличение частоты вращения выше приводит к тому, что ЭДС будет больше напряжения сети, а ток и электромагнитный момент поменяют свой знак (направление). Двигатель переходит в тормозной режим, называемый рекуперативным. Рекуперация означает преобразование двигателем постоянного тока механической или запасенной во вращающихся частях кинетической энергии обратно в электрическую и отдачу ее в сеть. Таким образом, рекуперативный тормозной режим в рассматриваемых машинах возможен, если
ЕДВ = UСЕТИ или  ДВ >
ДВ >  O
O
При этом знак тока и момента меняется на противоположный (отрицательный). Уравнение характеристик (2.5) и (2.9) в рекуперативном режиме:
 :
:  . (2.21)
. (2.21)
Значение коэффициентов  и
и  не изменяется, так как не меняются U, r, Ф. Характеристика машины в режиме рекуперативного торможения является продолжением характеристики двигательного режима. Момент на валу становится отрицательным
не изменяется, так как не меняются U, r, Ф. Характеристика машины в режиме рекуперативного торможения является продолжением характеристики двигательного режима. Момент на валу становится отрицательным
после  (Рис.2.6).
(Рис.2.6).
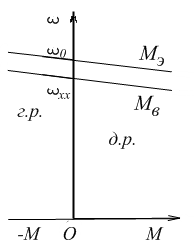
Рис. 2.6. Механическая характеристика двигателя постоянного тока параллельного возбуждения при рекуперативном торможении.
На практике рекуперативный тормозной режим можно использовать в следующих случаях:
на стендах послеремонтного испытания ДВС в качестве нагрузки на валу. Двигатель внутреннего сгорания запускают в работу и разгоняют вместе с соединенной с ним на одном валу машиной постоянного тока до частоты вращения 
 . Загрузку ДВС регулируют, изменяя значение напряжения на якоре или вводя добавочное сопротивление в цепь якоря;
. Загрузку ДВС регулируют, изменяя значение напряжения на якоре или вводя добавочное сопротивление в цепь якоря;
в электрифицированных подъемно-транспортных механизмах при спуске груза или движении под уклон. В этом случае включают двигатель для движения вниз (механическая характеристика находится в третьем квадранте).
В начале разгона до частоты вращения направления действия моментов двигателя и груза совпадают. Затем знак момента двигателя меняется, так как изменилось направление тока. На частоте вращения момент двигателя уравновешивается
моментом груза МC.
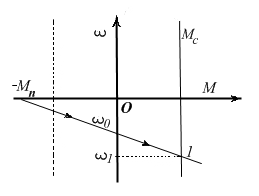
Рис.2.7. Механическая характеристика двигателя постоянного тока параллельного возбуждения в рекуперативном режиме при опускании груза.
Далее спуск идет с постоянной частотой вращения  . Так как
. Так как 
 , электрический двигатель переходит в режим рекуперативного торможения. В этом случае запасенная потенциальная энергия груза преобразуется в электрическую и отдается в сеть (рис.2.7);
, электрический двигатель переходит в режим рекуперативного торможения. В этом случае запасенная потенциальная энергия груза преобразуется в электрическую и отдается в сеть (рис.2.7);
в установках, регулирующих частоту вращения изменением напряжения или потока. Допустим, с помощью управляемого выпрямителя (или генератора) уменьшаем напряжение на якоре с UH до U1 (рис. 2.8). Двигатель переходит из точки 1 с естественной характеристики в точку 2. При снижении угловой скорости от до  происходит рекуперативное торможение.
происходит рекуперативное торможение.
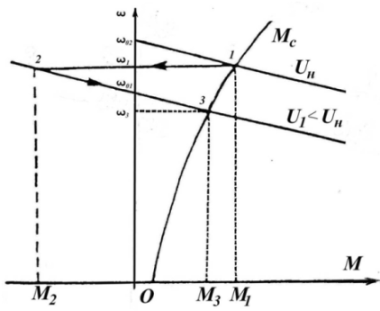
Рис.2.8. Механическая характеристика электропривода вентилятора с двигателем постоянного тока параллельного возбуждения
при пониженном напряжении.
Таким образом, следует отметить:
1) режим рекуперативного торможения возможен при
условии, когда ЕДВ > UСЕТИ или  .
.
2) в режиме рекуперативного торможения электрическая машина преобразует механическую энергию, поступающую с вала от рабочей машины, в электрическую и отдает ее в сеть. Для доказательства рассмотрим уравнения ЭДС данного тормозного режима:
 . (2.22)
. (2.22)
Умножим левую и правую части на I:
 I. (2.23)
I. (2.23)
Окончательно получим:
PСЕТИ = РМЕХ - ΔРЭЛ Я (2.24)
В режиме рекуперативного торможения в сеть отдается мощность, равная механической за вычетом потерь в якоре.
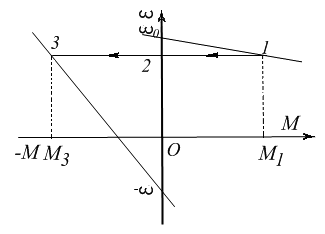
Рис. 2.9. Механическая характеристика ДПТ НВ в режиме
противовключения при реверсе.
Режим противовключения на практике осуществляется в двух случаях – при реверсе и тормозном спуске груза.
При реверсе – изменении направления вращения в момент переключения напряжения на якоре не изменяются значение и направление вращения, т.е. ω1 = ω3 за счет сил инерции. Под действием напряжения, сменившего знак, в якоре изменяется направление тока и момента двигателя (положительный М1 на отрицательный М3) (рис.2.9).
От точки 3 до точки 4 машина работает в режиме противовключения. Выражения механической и электромеханической характеристик:
 ; (2.25)
; (2.25)
 . (2.26)
. (2.26)
В режиме тормозного спуска со стороны рабочей машины к валу двигателя прикладывается встречный активный момент такого значения, что двигатель сначала останавливается, а затем начинает вращаться в обратную сторону (против включения).
На рис.2.10, изображен МС - график активного момента, создаваемого, например, грузом поднимаемого лебедкой, а 1 – естественная механическая характеристика электродвигателя. Допустим, что подъем идет с частотой вращения ω1. Если в цепь якоря ввести добавочное сопротивление RДОБ, то двигатель перейдет на искусственную механическую характеристику 2. Момент двигателя уменьшится до значения М2. Так как М2 < МС, то скорость подъема будет уменьшаться. По мере снижения частоты вращения двигателя его момент увеличится. Но при ω = 0 (в верхней точке подъема) момент двигателя меньше активного момента МС, поэтому якорь начинает вращаться в обратную строну (против включения), а груз - опускаться. В точке 4 моменты уравновешиваются, т.е. МДВ = МС, и спуск продолжается уже с постоянной частотой вращениия ω4. В точке 4 двигатель работает в тормозном режиме - режиме противовключения.
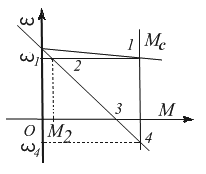
Рис.2.10. Механическая характеристика ДПТ НВ в режиме
противовключения.
Режим противовключения имеет следующие особенности:
1) напряжение сети и ЭДС двигателя действуют согласно (суммируются), что приводит к росту тока в якорной цепи. Для ограничения этого тока необходимо включить добавочное сопротивление;
2) механическая мощность с вала и из сети поглощается в якорной цепи. Значения этих мощностей определяют, если умножить левую и правую части уравнения (2.19) в режиме противовключения на IсФ:
 . (2.27)
. (2.27)
Известно, что  ;
;  ;
;
 . Тогда
. Тогда  ;
;
 . (2.28)
. (2.28)
Отсюда видно, что чем больше Rдоб, тем меньше значение потерь в якоре двигателя, тем он меньше греется;
3) на всем диапазоне изменения частоты вращения от ω3 до нуля возникают большие тормозные моменты (рис.2.9), поэтому данный вид торможения иногда применяют для быстрой остановки двигателя;
4) любые тормозные моменты можно получать при малой частоте вращения, например, при медленном опускании груза.
Режим динамического торможения с независимым возбуждением осуществляется следующим образом: якорь работающего двигателя отключается от сети и замыкается на сопротивление.
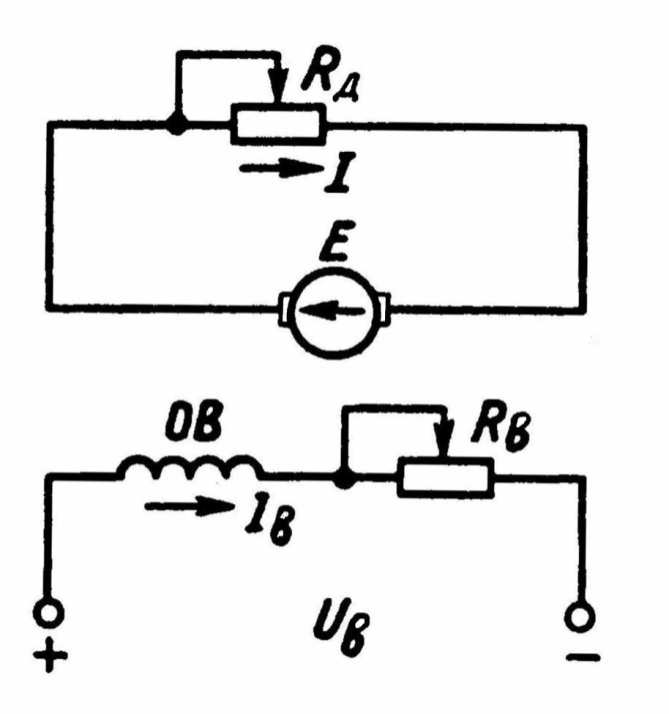
Рис.2.11. Включение ДПТ НВ при динамическом торможения.
Обмотка возбуждения остается включенной в сеть (рис.2.11). Якорь машины постоянного тока вращается за счет сил инерции или активного момента рабочей машины.
Вследствие того, что двигатель отключен от сети, уравнения электромеханической и механической характеристик имеют вид:
 = (rя + RДОБ)I/сФН|; (2.29)
= (rя + RДОБ)I/сФН|; (2.29)
= (rя + RДОБ)М/сФН2 . ) (2-17
Анализируя полученные уравнения, можно отметить: характеристики проходят через начало координат (рис.2.12); характеристики находятся в четвертом и втором квадрантах; наклон механических характеристик, как и в двигательном режиме, определяется значениями  и потока Ф.
и потока Ф.
Особенности режима динамического торможения заключаются в следующем: при остановленном двигателе динамический момент равен нулю; в области малых частот вращения значение тормозного момента мало.
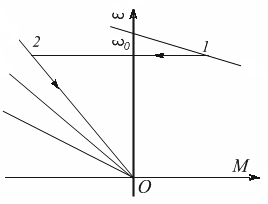
Рис. 2.12. Механические характеристики ДПТ НВ в режиме
динамического торможения.
Если умножить левую и правую части уравнения электромеханической характеристики на ток, получим:
(rя + RДОБ)I2 = сФНI ; ΔРЭЛ = РМЕХ . (2.30)
Таким образом, вся подведенная к валу от рабочей машины механическая мощность преобразуется в электрическую и идет в якорную цепь двигателя постоянного тока, где выделяется в виде
теплоты
2.4. Методы расчета пусковых сопротивлений ДПТ НВ
В машине постоянного тока обмотка якоря имеет малое сопротивление и при включении в сеть возникают пусковые токи, которые могут достигать 15...20  Iном. Увеличение токов якоря выше значения 2...2,5 Iном приводит к ухудшению коммутации.
Iном. Увеличение токов якоря выше значения 2...2,5 Iном приводит к ухудшению коммутации.
Кроме того, возникающие динамические усилия могут постепенно разрушить обмотку якоря, вызвать срезание шпонок, скручивание валов и т.д. Ограничение пусковых токов осуществляется с помощью сопротивлений r1, r2, r3, включаемых в якорную цепь (рис.2.12). По мере разгона двигателя увеличивается ЭДС, а ток снижается. Последовательно закорачивая сопротивления контактами КМ1, КМ2, КМЗ, выполняют (осуществляют) пуск. Пусковая диаграмма двигателя представлена на рис. 2.13.
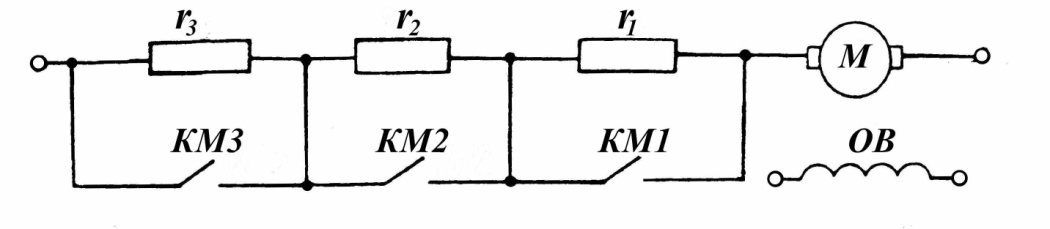
Рис. 2.13. Схема включения пусковых резисторов..
Значения токов переключения I1 и I2 выбирают, исходя из требований технологии к электроприводу и коммутационной способности двигателя. Так, принимают I1 = (2,0...2,5)IН и I2 = (1,2...1,3)IН в тех случаях, когда продолжительность пуска двигателя влияет на производительность часто включаемой машины.
Если требуется плавный пуск, например, пассажирских лифтов, то значения токов переключения будут обусловлены допустимыми ускорениями электропривода. В тех случаях, когда пуск редкий и не ограничиваются условия пуска, значения токов I1 и I2 можно взять несколько больше рабочих токов (но значительно меньше, чем в первом случае, когда I1 = (2...2,5)IН.
Значения пусковых сопротивлений рассчитывают аналитическим и графическим методами. Если число ступеней задано, то это означает, что расчет выполняется для уже известной стандартной контакторной панели. Если число ступеней не известно, требуется подобрать
панель.