
5 динамика механической системы








Механическая система – это совокупность взаимодействующих между собой материальных точек (тел).
Классификация сил, действующих на материальные точки механической системы
 Силы, действующие на механическую сис- тему, разделяют на:
Силы, действующие на механическую сис- тему, разделяют на:
–  внешние (P e ) и внутренние (P j );
внешние (P e ) и внутренние (P j );
–  активные (P a )
активные (P a )
тивные) (N ).
и реакции связей (реак-
Рисунок 5.1
Одна и та же сила может быть как внешней, так и внутренней, в зависимости от того какие тела входят в рассматриваемую систему.
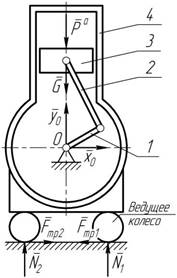
Например, рассмотрим механическую сис-
тему (рисунок 5.1), состоящую из: кривошипа 1; шатуна 2; поршня 3; корпуса 4. Определим внешние и внутренние силы, активные и реакции связей (таблица 5.1).

 Таблица 5.1 – Разделение сил, действующих на механическую систему
Таблица 5.1 – Разделение сил, действующих на механическую систему
|
Сила | Система тел | |
| поршень – шатун – кривошип | корпус – поршень – шатун – кривошип | |
|
G
| внешняя активная | внешняя активная |
| P a | внешняя активная | внутренняя активная |
| x O , y O | внешние реактивные | внутренние реактивные |
|
N1 , N2
| – | внешние реактивные |
|
F тр1
| – | внешняя активная |
|
F тр 2
| – | внешняя реактивная |
Свойства внутренних сил:
1) так как внутренние силы попарны и равны по величине, то главный вектор и главный момент внутренних сил равны нулю:

|
R j = åP j = 0;
M j = åM
(P j )= 0 ;
2)
|
внутренние силы не уравновешены, так как приложены к разным телам.
Дифференциальные уравнения движения механической системы
 Для механической системы, состоящей из n материальных точек, можно составить n векторных дифференциальных уравнений движений:
Для механической системы, состоящей из n материальных точек, можно составить n векторных дифференциальных уравнений движений:
|
2
 m i i = P i
m i i = P i
dt2
e + P j
. (5.1)
|
В проекциях на оси координат необходимо составить 3n
дифференциальных уравнений. Для случаев, когда
n > 3
решение
уравнений имеют значительные математические трудности.
Избежать этого помогут общие теоремы динамики для механической системы, основывающиеся на понятиях центра масс механической системы и момента инерции.
Центр масс механической системы
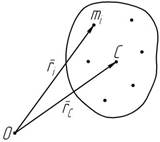 Масса механической системы m равна сумме
Масса механической системы m равна сумме
масс m i
всех точек (тел) входящих в эту систему
(рисунок 5.2):
m = åm i .
Рисунок 5.2
Из статики известно (см. раздел I, тема 10, пункт 10.2):
r C
Так как G = mg ; G i = m i g , то
= år i G i .

 G
G


 r = år i m i g =
r = år i m i g =
C mg
= år i m i . (5.2)


 m
m
Центром масс механической системы называется геометрическая точка C , радиус-вектор которой определяется равенством (5.2).
В проекции на координатные оси получим:
x  = å x i m i ;
= å x i m i ;
C m
y  = å y i m i ;
= å y i m i ;
C m
z  = å z i m i .
= å z i m i .
C m