Стохастический поиск форм тенсегрити








Miniar ATTIG, Maher ABDELGHANI, Nabil ben KAHLA
Политехническая школа Туниса, Карфагенский университет, Лаборатория прикладной механики и системных исследований, Тунис
Высший институт прикладных наук и технологий Сусса, Университет Сусса, Тунис
Университет Короля Халида, факультет гражданского строительства, Абха, Саудовская Аравия
Автор-корреспондент: N. B. Kahla E-mail: nabil.benkahla@gmail.com
Авторское право © 2016 Вильнюсский технический университет имени Гедиминаса (ВГТУ)
Press: http://www.tandfonline.com/TESN
Поступила в редакцию 13 февраля 2016 г.; принято 04 апреля 1016 г
Опубликована: Engineering Structures and Technologies, 2016, 8(2): 52–64
АННОТАЦИЯ. Системы тенсегрити представляют собой особый класс пространственных сетчатых структур из сжатых распорок и натянутых тросов. В данной работе исследуется производительность алгоритмов стохастических подпространств для поиска форм сложных структур тенсегрити. Предложен алгоритм из подкласса семейства идентификации Стохастических подпространств - Алгоритм сбалансированной реализации, исследуемый для идентификации форм простейшей структуры в виде 3-призмы и купола Гейгера. Представленный алгоритм обеъдинён со схемой стабилизации устойчивости при использовании комбинированных критериев (частота, затухание и формы колебаний). Показано, что, хотя в исследуемых структурах присутствуют близко расположенные моды, алгоритм сбалансированной реализации работает хорошо и гарантирует разделение близко расположенных собственных частот. Результаты идентификации форм подтверждаются путём сравнения корреляций (эмпирических и модельных), что показывает эффективность предложенной методологии.
Ключевые слова: идентификация систем, алгоритм стохастического подпространства, алгоритм сбалансированной реализации, тенсегрити-структуры, купол Гейгера, вибрация.
.
ВВЕДЕНИЕ
Системы тенсегрити представляют собой особый класс пространственных сетчатых структур, состоящих из распорок и тросов. Растянутые и сжатые компоненты собраны в самоуравновешивающуюся систему, обеспечивающую стабильность и жёсткость конструкции. Слово «тенсегрити» происходит от сокращения слов «натяжение» и «целостность». Оно было предложено Ричардом Бакминстером Фуллером в 1962 году. Недавнее и широко принятое определение было предложено Мотро (2003): «Тенсегрити — это система в стабильном самоуравновешенном состоянии, включающая прерывистый набор сжатых компонентов внутри континуума натяжённых компонентов». . Это определение включает системы, в которых сжатые элементы связаны между собой как тенсегрити-структуры. Скелтон и др. (2001) предложил термин «класс k» для различения различных типов структур, включенных в это более широкое определение: структура тенсегрити «класса k» определяется как стабильная тенсегрити с максимумом k взаимосвязанных сжатых элементов.
Концепция тенсегрити вызвала значительный интерес у ученых и инженеров в различных областях от аэрокосмической техники, робототехники, архитектуры и гражданского строительства до моделирования биологических систем (Skelton, de Oliveira 2009). В аэрокосмической технике концепция тенсегрити предлагает альтернативное решение для проектирования лёгких развёртываемых конструкций, таких, как мачты, солнечные батареи и антенны (Puig et al. 2010). Парадигма тенсегрити также вдохновила на исследования роботизированных систем со струнным приводом (Graells Rovira, Mirats Tur 2009; Juan, Mirats Tur 2008; Paul et al. 2006). Архитекторы исследуют адаптивную архитектуру и использование систем тенсегрити в адаптивных зданиях (д’Эстре Стерк, 2003). Кроме того, концепция тенсегрити используется для моделирования биологических систем, таких, как структуры цитоскелета одноклеточных организмов (Ingber 1998). Тенсегрити также особенно привлекательны для активных структур, поскольку часто требуется небольшое количество энергии для структурного контроля и адаптации к меняющимся условиям (Скелтон и др. 2001).
Исследования динамического поведения тенсегрити-структур были начаты в середине 1980-х годов. Мотро и др. (1986) представили экспериментальную и численную работу о конструкции тенсегрити, состоящей из трёх стержней и 9 тросов. Они показали, что линеаризованная динамическая модель вокруг равновесной конфигурации предлагает хорошее приближение к нелинейному поведению простых структур тенсегрити. Бен Кала и др. (2000) разработали численную процедуру нелинейного динамического анализа тенсегрити-систем. Мураками (2001a, 2001b) использовал лагранжевы и эйлеровы подходы для вывода уравнений движения структур тенсегрити, а также выполнил численное моделирование и модальный анализ некоторых модулей тенсегрити. Султан и др. (2002) вывели линеаризованные динамические модели для двух классов структур тенсегрити и показали, что динамический диапазон форм обычно увеличивается при предварительном натяжении, т.е. устойчивость растёт. Arsenaultdub и Gosselin (2006) разработали динамические модели плоских модулей тенсегрити с 1, 2 и 3 степенями свободы. Масик и Скелтон (2006) использовали линеаризованную динамическую модель для повышения эффективности динамического контроля структуры тенсегрити. Дубе и др. (2008) представили сравнительное исследование между экспериментальными тестами и численным моделированием, провёденным на мини-сетке тенсегрити с учётом как статической, так и динамической нагрузки. Недавно Бел Хадж Али и Смит (2010) исследовали динамическое поведение пятимодульной структуры тенсегрити и показали, что резонансные частоты системы тесно связаны с уровнем предварительного напряжения. Коркмаз и др. (2011, 2012) работали над определением стратегий управления устойчивостью к повреждениям активной конструкции тенсегрити, а также над конфигурацией системы управления развёртыванием и над устойчивостью к повреждениям моста тенсегрити. Эль Оуни и Бен Кала (2014) изучали активное управление вибрацией купола Гейгера с использованием децентрализованной совмещенной интегральной силовой обратной связи.
Большинство исследований динамики тенсегрити показали, что для таких систем модальная характеристика структуры связана с её состоянием самонапряжения. Фактически в тенсегрити-структурах самонапряженное состояние существенно влияет на мягкие моды (режимы нулевой жёсткости, связанные с бесконечно малыми механизмами конструкции). Это говорит о том, что идентификация модальных параметров и отслеживание их возможных изменений могут привести к оценке внутренних сил системы и обнаружению возможных повреждений ее компонентов. Тем не менее, модальные параметры структуры нелегко определить, особенно когда собственные частоты расположены близко друг к другу, что обычно имеет место для структур тенсегрити (Bel Hadj Ali, Smith 2009). В связи с этим возникает проблема выбора подходящего метода идентификации для таких систем. Традиционные методы идентификации, извлекающие модальные параметры из входных и выходных данных, хорошо разработаны и широко используются в технике. Тем не менее, проведение возбуждения при полевых испытаниях больших конструкций часто представляет собой сложную задачу. Более того, во многих случаях внешнее возбуждение имеет сложную природу и не может быть измерено (береговые сооружения, мосты и т. д.). Чтобы избежать трудностей традиционных методов, методы извлечения модальных параметров только из данных структурного отклика были глубоко исследованы в течение последних нескольких десятилетий (Mrabet et al. 2014; Reynders et al. 2007).
Несколько методов идентификации, таких, как метод естественного возбуждения (NEXT), декомпозиция в частотной области (FDD) и идентификация стохастического подпространства (SSI), используются для идентификации динамических характеристик, когда структуры возбуждаются неизвестным сигналом. Основное предположение, лежащее в основе таких методов, состоит в том, что возбуждение представляет собой белый гауссовский шум, тогда подробные сведения о входном возбуждения больше не нужны.
Была проделана большая работа по идентификации только выходных данных. Бенвенист и Фукс (1985) рассмотрели использование алгоритмов стохастической реализации для модального анализа конструкции. Методы идентификации системы только по выходному сигналу доказали свою эффективность для идентификации систем во многих инженерных приложениях (Basseville et al. 2000). Среди доступных методов управляемые методы стохастической идентификации подпространства считаются одними из мощных методов идентификации для модального анализа только по выходу во временной области (Giraldo et al. 2009). Ван Оверчи и Де Мур (1996) предоставили математическую основу для алгоритмов подпространства, существующих в литературе, включая те, которые используются для идентификации систем ввода-вывода или стохастических систем только вывода. В литературе сообщалось о нескольких применениях идентификации только на выходе. Бассевиль и др. (2000) исследовали обнаружение неисправностей на основе подпространства для мониторинга вибрации. Модальный анализ механических и гражданских конструкций является классической и широко изучаемой темой (Magalhaes et al. 2008; Carden, Mita 2009; Reynders et al. 2007). Однако, идентификация сложных систем тенсегрити только по выходному сигналу пока не изучалась.
В этой статье алгоритм подкласса семейства SSI - алгоритм сбалансированной реализации - исследуется для модальной идентификации простейшей структуры в виде треноги (3-призмы) и купола Гейгера. Предполагается, что тенсегрити-структуры в натянутой и жёсткой конфигурации неизменны во времени, испытывая лишь небольшие линейные колебания относительно своего устойчивого положения равновесия, что позволяет считать такие структуры стационарными. При этом структуры симметричны и представляют собой близко расположенные моды. Алгоритм сбалансированной реализации представлен и применяется для модальной идентификации только по выходу. Также используется схема стабилизации с высокими требованиями по частоте, затуханию и формой колебаний.
Результаты идентификации форм подтверждаются путём сравнения корреляций (эмпирических и модельных), что демонстрирует эффективность предложенной методологии.
1. ДИНАМИЧЕСКАЯ МОДЕЛЬ
Итак, будем считать, что поведение исследуемой конструкции можно описать стационарной линейной динамической системой, а в интересующем диапазоне частот входные силы можно смоделировать как стационарный белый шум. Следовательно, модель может быть описана следующими матричными дифференциальными уравнениями:
Zt&&()+CZt& ()+ KZt()= vt()
, (1)
Y()t = LZ()t
где t - непрерывное время, M, C и K - матрицы массы, демпфирования и жёсткости соответственно, Z - многомерный вектор, содержащий информацию о степенях свободы (возможных смещениях) конструкции; v - внешняя неизмеряемая сила, моделируемая как стационарный белый шум с ковариационной матрицей Q, Y - (малоразмерный) вектор собираемых данных измерений, L - матрица позиций датчиков. Механические характеристики системы (матрицы M, C и K) не могут быть восстановлены непосредственно из выходных измерений, поэтому для идентификации используются модальные характеристики системы - формы колебаний, или собственные частоты, обозначаемые в общем виде как , и модальные формы или наблюдаемые собственные векторы, обозначаемые в общем виде как . Эти величины являются решениями следующего уравнения:
2
( ì + ì+ )Øì =0, yì = Øì . (2)
Модель выборки, представленная уравнением (1), представлякт собой модель дискретного времени со скоростью 1/ в форме пространства состояний:
Xk+1 =FXk +åk , (3)
Yk = HXk
где состояние на выходе описывается как:
Zkô
Xk = , Y k =Y (kô). (4 a, b)
Zk& ô
0 I
Матрицы перехода состояний при наблюдениях:
= FTs,,F = , = 0 , (5 a, b, c)
− −
− −
где шум состояния k+1 является белым шумом с нулевым средним значением и ковариационной матрицей:
def
Q = ååT , (6)
k k
где E(.) обозначает оператор математического ожидания. Характеристики формы, определённые в уравнении (2), эквивалентны собственной структуре ϕ, F:
def
ôì
e = ë, y=ìëf= ϕH ë. (7 a, b)
С этого момента будем рассматривать линейные системы с несколькими переменными, описываемые моделью пространства состояний, заданной уравнением (3), где состояние X и наблюдаемый результат Y имеют размерности 2m и r соответственно. Процесс шума состояния (k)k представляет собой неизмеряемую гауссову последовательность белого шума с нулевым средним значением и постоянной ковариационной матрицей Q.
2. МЕТОДЫ ИДЕНТИФИКАЦИИ ПОДПРОСТРАНСТВА
Итак, будем рассматривать линейные системы с несколькими переменными, описываемые моделью пространства состояний с дискретным временем:
Xk+1 =FXk +åk
, (8)
Yk =HXk +ík
где состояние X и наблюдаемый результат Y имеют размеры 2m и r соответственно. При этом количество степеней свободы равно m, а r — количество датчиков.
Процесс шума состояния (k)k представляет собой неизмеряемую гауссовскую последовательность белого шума с нулевым средним значением. Мы предполагаем шум k стационарным с постоянной ковариационной матрицей; вопрос устойчивости к нестационарному возбуждению подробно рассматривается в статьях Mevel et al. (2003) и Basseville et al. (2000).
Предполагается, что процесс измерения шума (vk)k представляет собой неизмеряемый процесс скользящего среднего, обозначаемый MA(i), представляющий собой последовательность Гаусса с нулевым средним значением. В дальнейшем мы используем условное обозначение, согласно которому i = –1 для отсутствия шума измерения и i = 0 для белого шума измерения. Обратите внимание, что с этим допущением для структуры MA шум измерений не влияет на собственную структуру системы, заданную уравнением (8).
Взаимная корреляция между состоянием Xk и наблюдением Y есть
def
G = E XY T , (9)
k k
и пусть:
k
M
p−1
HF (10 a, b)
- матрица наблюдаемости системы p-го порядка, заданная уравнением (8), и матрица управляемости пары (F, G) соответственно. Предполагается, что при достаточно большом p матрицы как наблюдаемости, так и управляемости имеют полный ранг 2m.
Рассмотрим последовательность ковариаций:
def
R = EY YT , (11)
j ( k+jk )
выхода Yk модели пространства состояний, представленной уравнением (8). Для q > p + 1 пусть Hp+1, q — блочная ганкелева матрица:
i+ i+ L iq++
Hp +1, = . (12)
M M OM
LL
ip++1 ip++
Как упоминалось выше, целое число i отражает предполагаемую зависимость в последовательности шума измерения (vk)k. Его следует рассматривать как конструктивный параметр алгоритмов, описанных в статье.
Выбор собственных векторов F в качестве основы для пространства состояний модели уравнения (8) дает следующее конкретное представление матрицы наблюдаемости, введённой в уравнение (10a) (Basseville et al. 2000):
f
fÄ
Op+1 ( )è= ,
M
(13)
fÄp
где диагональная матрица определяется как = diag(), а и определены в уравнении (7a, b). Для любого другого базиса состояния матрица наблюдаемости Op+1 может быть записана как:
= ( )è (14)
p + p +
для подходящей обратимой матрицы U размером 2 м2 м. Из определения Hp+1,q, Op и Cq в уравнении (12) и уравнении (10a, b) соответственно, прямое вычисление Rj из уравнений модели даёт:
R = HFij++1G j ≥ 0 (15)
ij++1 ( )
что приводит к следующему хорошо известному свойству разложений:
H
= i+1 . (16)
HF P +1, p +1 ( )
O = HF2 and = L p− ,
p p
Пусть W1, W2 — две определяемые пользователем обратимые весовые матрицы размером (p+1)r и qr соответственно. Тогда разложение по сингулярным значениям (SVD) этой матрицы есть:
D 0
= p p⊥ (17)
1 p +1, 2 ( )
th
где D = diag(1,…, 2m) содержит 2m ненулевых сингулярных значений в порядке убывания, 2m столбцов матрицы P являются соответствующими левыми сингулярными векторами, и столбцы (qr – 2m) матрицы p⊥ являются левыми сингулярными векторами, связанными с сингулярным значением 0. Обратите внимание, что P является полным рангом столбца (fcr). Свойство разложения матричного уравнения Ганкеля (16) приводит к выражению:
W = Fi+1 (18)
1 p +1, 2 1 p +1 ( ) 2
i+ i+ L iq+ 12
с, например: W OpPD, где T — неособое преобразование. Затем матрица наблюдаемости может быть восстановлена с точностью до замены базиса или, что то же самое, для некоторой пары (H, F) представлена как:
−1 12
Op+ (H,F ) =W PD T. (19)
Конкретный выбор коэффициента D1/2 вместе с тождеством T соответствует случаю сбалансированной реализации (BR), когда весовые матрицы W1 и W2 тождественны. Можно использовать и любой другой несингулярный множитель.
Пара (H, F) восстанавливается из Op+1 (H, F) стандартным способом (Peeters, Ventura 2003). Собственная структура матрицы перехода состояний F затем восстанавливается из: F −1 , полученной, например, путём определения собственных значений.
In practice, one has only a limited data sample of a certain length and therefore only empirical correlations may be computed. The block Hankel matrix will consequently be generically of full rank. In this case, truncation of the SVD will be necessary. The estimated observability matrix will no longer enjoy the shift structure and the state matrices will be only estimates of the true ones. Tis is one source of error that can be found in the identifcation results. Therefore the Balanced Realization Algorithm (BR) is employed.
На практике имеется только ограниченная выборка данных определенной длины, поэтому можно вычислить только эмпирические корреляции. Следовательно, блочная ганкелева матрица в общем случае будет иметь полный ранг. В этом случае потребуется усечение SVD, тогда матрица оценочной наблюдаемости больше не будет иметь структуру сдвига, а матрицы состояний будут только оценками истинных. Это один из источников ошибок в результатах идентификации. Поэтому используется алгоритм сбалансированной реализации (BR).
3. ЧИСЛЕННЫЕ ПРИМЕРЫ
3.1. 3-ПРИЗМА
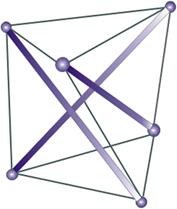
Эта простейшая структура тенсегрити (тренога), показанная на Рис.1, выбрана для первоначального исследования предложенным методом. Она состоит из шести узлов, координаты которых указаны в таблице 1, и двенадцати элементов - девяти тросов и трёх распорок. Граничные условия были выбраны таким образом, чтобы перекрыть три нижних узла 1, 2 и 3 во всех направлениях (X, Y и Z). Следовательно, конструкция имеет девять степеней свободы, определяемых следующим образом: три степени свободы на каждый верхний узел - соответственно для узлов 4, 5 и 6 и в порядке X, Y, затем Z. Три нижних троса становятся избыточными и могут быть опущены, так как они не влияют на динамические характеристики системы. Кабельные элементы имеют модуль упругости 0,4·1011 Н/м2, площадь поперечного сечения 0,2810–4 м2, удельный вес 2,05 Н/м и длину в нерастянутом состоянии 1 м. Распорки Те имеют модуль упругости 0,2·1012 Н/м2, площадь поперечного сечения 3,25·10–4 м2 и удельный вес 27,9 Н/м.
TАБЛИЦА 1. НАЧАЛЬНЫЕ КООРДИНАТЫ ТРЕНОГИ
Узел X (m) Y (m) Z (m)
1 0.5774 0.00 0.00
2 –0.2444 0.5000 0.00
3 –0.2665 –0.4617 0.00
4 –0.4523 0.3015 0.9194
5 0.94 –0.5424 0.9194
6 0.5094 0.2793 0.9194
Система в исходной конфигурации имеет один бесконечно малый механизм и одно состояние собственного напряжения. Для стабилизации требуется предварительное предварительное натяжение его компонентов. Таким образом, геометрический нелинейный анализ был выполнен для определения предварительно напряженной геометрии симплексной треноги. После достижения равновесия были определены девять собственных частот вибрации этой конструкции и соответствующие им формы колебаний. Результирующие собственные частоты системы приведены в таблице 2 и называются точными. Режим 1, показанный на рис. 3а, соответствует вращению верхних треугольных тросов в горизонтальной плоскости относительно центральной оси симплекса штатива. Это кручение, сопровождающееся растяжением элемента. Для режима 2