Рисунок 1.1. Пример использования структуры тенсегрити в архитектуре [10].








Слово "тенсегрити" - это эквивалент термина "целостность напряжения" (tension integrity). В литературе обычно считают изобретателем этой структуры Бакминстера Фуллера [15], поскольку он был первым, кто предложил это понятие. Однако в 1996 году Кеннет Снелсон опубликовал статью [51], утверждающую, что он был первоначальным изобретателем этой конструкции (в России подобные структуры использовались ещё Шуховым – прим.перев.).
Тенсегрити определяется как набор жёстких элементов, подвешенный в сети общего постоянного растяжения. Жёсткие элементы подвергаются постоянному сжатию, что приводит к отсутствию действия изгибающих моментов на какие-либо конструктивные элементы тенсегрити.
Одной из причин, по которой структуры тенсегрити привлекли внимание исследователей, является возможность их соответствия требованиям ударопрочности и механической прочности. Однако, эта биоподобная спиральная структура создают сложную проблему, когда дело доходит до управления ею, поскольку нелинейное взаимодействие её сложной динамики и часто сложная геометрия требуют передовых стратегий управления. Более того, структуры тенсегрити часто недооцениваются, поскольку могут иметь больше степеней свободы, чем используемые в них манипуляторы, что ещё более усложняет управление такими структурами.
Структуры Тенсегрити могут иметь различные формы. На рисунке 1.2а показана самая простая структура в виде 3-призмы, на рисунке 1.2c - более сложная геометрия в виде тетраэдра. По мере усложнения структур в них присутствует всё больше элементов сжатия и растяжения, что соответственно приводит к более сложной динамике.
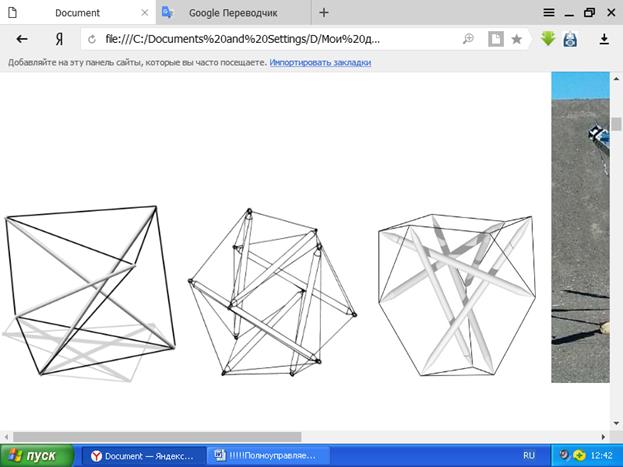
Рисунок 1.2. Распространённые структуры тенсегрити: a) 3-призма [2], б) Икосаэдр [5], в) Тетраэдр [6].
1.1. Роботы-тенсегрити
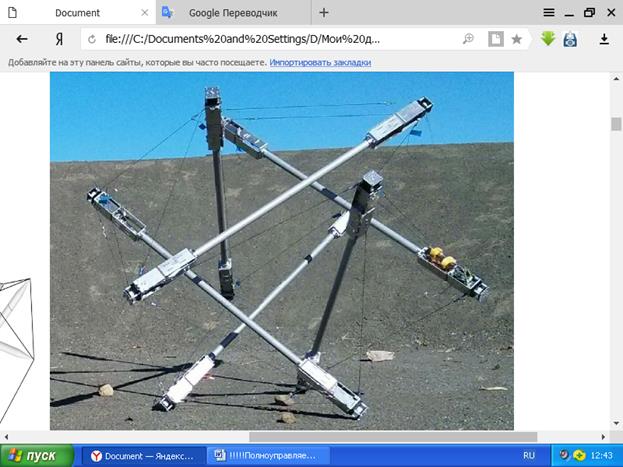
В 2000 году Султан и др. [52] предложили структуру тенсегрити для авиасимулятора, но это была ещё неявная связь структур тенсегрити с робототехникой. Три года спустя Олдрич и др. [1] стали первыми непосредственно связывать их с робототехникой, продемонстрировав управление привязанной роботизированной рукой такой структуры. С тех пор было разработано множество роботов, основанных на принципе тенсегрити, которые включают лазающих, ползающих и перекатывающихся роботов [7, 13, 48, 55]. Эти типы роботов могут быть использованы в освоении космоса в ближайшем будущем, осуществимость чего была рассмотрена в диссертации Хонга в 2014 году [23]. Освоение космоса с помощью тенсегрити-роботов также стимулировали исследования, проводимые Интеллектуальным исследовательским центром NASA Ames Research Center, группа робототехники [7, 47, 48]. На рисунке 1.3 показан один из их прототипов.