
2 Механические характеристики и регулирование скорости ДПТ смешанного возбуждения (СВ)








 |
Схема подключения ДПТ СВ приведена на рис. 25. Машина имеет две обмотки возбуждения: последовательную ОВМ1 и независимую ОВМ2.
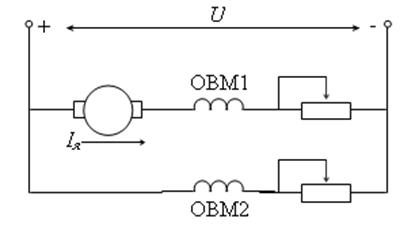
Рис. 25. Схема подключения ДПТ СВ.
Уравнения для электромеханической и механической характеристик двигателя аналогичны соответствующим уравнения для ДПТ ПВ:
w =  ; w =
; w =  ; (1.32)
; (1.32)
Причем здесь магнитный поток определяется как сумма магнитных потоков Φ 1 – обмотки ОВМ1 и Φ 2 – обмотки ОВМ2
Φ = Φ 1 + Φ 2.
Для ДТП СВ, в отличие от ДПТ ПВ, скорость идеального холостого хода имеет конечное значение и определяется потоком Φ 2:
w0 =  .
.
Механическая характеристика двигателя смешанного возбуждения (кривая 3 на рис. 26) занимает промежуточное положение между характеристикой ДПТ НВ – кривая 1 и характеристикой ДПТ ПВ – кривая 2. Скорость ДПТ СВ при малых нагрузках изменяется значительно. А при больших нагрузках характеристика достаточно жесткая и близка к линейной, как у ДПТ НВ.
Для ДПТ СВ возможны те же тормозные режимы, что и для ДПТ НВ: 1) генераторное; 2) динамическое; 3) противовключением.
Генераторное торможение соответствует участку характеристики при скорости большей w 0. При переходе в режим генераторного торможения ток в якоре и в обмотке последовательного возбуждения меняет свой знак, что может размагнитить машину. Поэтому при возрастании скорости до w 0 ОВМ1 обычно шунтируют, и машина работает как ДПТ НВ.
Для динамического торможения якорь двигателя замыкают на добавочное сопротивление, а ОВМ1 отключают, чтобы избежать размагничивания. В результате машина работает как ДПТ НВ, и имеет такие же тормозные характеристики.
При торможении противовключением в цепь якоря вводят добавочное сопротивление, ограничивающее ток якоря. Характеристика при этом становится более мягкой (кривая 4 на рис. 26). Машина переходит в режим противовключения при отрицательных значениях скорости.
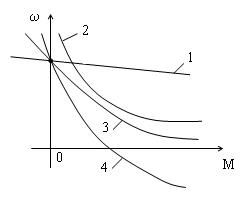
Рис.26. Механические характеристики ДПТ СВ.
Регулирование скорости ДПТ СВ так же, как ДПТ ПВ, может осуществляться: 1) изменением подводимого напряжения; 2) введением добавочного сопротивления в цепь якоря; 3) изменением потока последовательной обмотки возбуждения. Кроме того, для ДПТ СВ появляется дополнительная возможность регулирования скорости изменением потока независимой обмотки возбуждения.
Из рассмотренного следует, что ДПТ СВ имеют характеристики весьма удобные для тягового электропривода. По сравнению с ДПТ ПВ машины со смешанным возбуждением позволяют обеспечить генераторное торможение и регулирование скорости потоком обмотки независимого возбуждения.
3. Регулирование координат в замкнутых структурах
Наличие в электроприводе управляемого преобразователя, питающего якорную цепь или цепь возбуждения, имеющего один или несколько входов и достаточно высокий коэффициент передачи, открывает широкие возможности формирования требуемых искусственных характеристик за счет замыкания системы, т.е. подачи на вход как задающего сигнала, так и сигнала обратной связи по координате, которая должна регулироваться.
Принцип действия замкнутых систем автоматического регулирования координаты рассмотрим на нескольких простейших примерах.
3.1 Система УП-Д, замкнутая по скорости.
Если жесткость характеристик в разомкнутой системе УП-Д оказывается недостаточной для какого-либо технологического процесса, она может быть повышена посредством замыкания системы по скорости, т.е. использования отрицательной обратной связи по скорости - рис. 27 а.
a) б)
Рис. 27. Схема (а) и характеристики (б) электропривода постоянного
тока, замкнутого по скорости
К разомкнутой системе добавлен измерительный орган - тахогенератор ТГ, сигнал которого ЕТГ = gw сравнивается с задающим сигналом U’з, а разность U’з - gw подается на вход преобразователя (отрицательная обратная связь по скорости). Благодаря этому ЭДС преобразователя теперь определяется не только заданием, но и фактической скоростью вращения. Пусть привод работал в т. 1 (рис. 27 б), а затем момент сопротивления увеличился до значения Мс2. В разомкнутой схеме этому изменению соответствовала бы точка 2’. В замкнутой системе уменьшение скорости повлечет за собой рост входного сигнала
 (1.33)
(1.33)
то есть Еп, следовательно, при Мс2 привод перейдет на характеристику, соответствующую Еп2>Еп1 и будет работать в точке 2. В рассматриваемой схеме  , так как увеличение Uвх, а значит и Еп возможно лишь за счет некоторого уменьшения
, так как увеличение Uвх, а значит и Еп возможно лишь за счет некоторого уменьшения  . Такие системы называют статическими, в отличие от астатических, где
. Такие системы называют статическими, в отличие от астатических, где  .
.
Получим уравнение механической характеристики в замкнутой системе. Для этого в уравнения (1.29, 1.30) для разомкнутой системы подставим уравнение замыкания системы (1.33) и получим после простых преобразований:
 . (3.22)
. (3.22)
Приравнивая выражение для  в замкнутой и разомкнутой системах, будем иметь:
в замкнутой и разомкнутой системах, будем иметь:

то есть для получения одной и той же задающее напряжение в замкнутой схеме должно быть взято большим.
Сравнив выражение для  , получим:
, получим:
 ,
,
то есть перепад скорости при одинаковых нагрузках в замкнутой системе уменьшился в  раз.
раз.
3.2 Система УП-Д с нелинейной обратной связью по моменту.
Пусть требуется ограничить момент, развиваемый двигателем, некоторой предельной величины Мпред.. В системе УП-Д эту задачу можно решить, снижая ЭДС преобразователя при достижении моментом величины Мпред. Как уже было показано выше, эта операция выполняется автоматически, если использовать соответствующую обратную связь. В данном случае целесообразно использовать обратную связь по моменту или по току, который ему пропорционален (Ф = const), причем эта связь должна вступать в действие лишь при достижении током некоторого заданного значения. Такие обратные связи называют нелинейными или связями с отсечкой. Простейшая схема системы УП-Д с отрицательной обратной связью по току с отсечкой показана на рис. 28 а.
а) б)
Рис. 28. Схема (а) и характеристики (б) электропривода постоянного тока с отрицательной обратной связью по току с отсечкой.
На вход управляемого преобразователя при I < Iпред поступает лишь сигнал задания, поскольку сигнал обратной связи по току заперт вентилем В (IRос < Uоп). При достижении моментом величины Мпред отрицательная обратная связь по току начинает действовать, т.е.
Uвх = Uз - a I,
благодаря чему снижается Еп и рост момента ограничивается. Изменением Uз можно установить требуемую характеристику - рис. 28 б, а изменением Uоп - задать нужный предельный момент.
3.3 Замкнутая система источник тока - двигатель
При питании якорной цепи от неуправляемого источника тока (I=const) электропривод, как отмечалось, обладает свойством управляемого по цепи возбуждения “источника момента”, т.е. имеет в разомкнутой структуре вертикальные механические характеристики. Это обстоятельство очень удобно для построения замкнутых структур: исключение действия ЭДС вращения позволяет просто формировать любые характеристики посредством использования соответствующих обратных связей. Покажем это на простых примерах. В схеме на рис. 29 а отрицательная обратная связь по скорости включена на возбудитель, имеющий характеристику с ограничением; напомним, что установленная мощность возбудителя много меньше мощности двигателя. В предположении, что характеристики Ф(Uв) и Uв(Uвх) на рабочих участках линейны, имеем:
М = Uвх,
а) б)
Рис. 29. Схема (а) и характеристики (б) системы источник тока – двигатель, замкнутой по скорости
но, в свою очередь,
Uвх = Uз - Uос = Uз - gw.
Решив уравнение относительно  , получим:
, получим:
 , (3.23)
, (3.23)
т.е. будем иметь семейство параллельных характеристик (рис. 29 б), ограниченных посредством характеристики возбудителя заданной величиной момента.
Использовав отрицательную обратную связь по напряжению на якоре или в пренебрежении Rя - по ЭДС вращения - рис. 30 а, получим
 ,
,
а) б)
Рис. 30. Схема (а) и характеристики (б) системы источник тока – двигатель, замкнутой по напряжению на якоре
откуда, подставив в уравнение для момента, будем иметь:
 .
.
Таким образом, в этой структуре механические характеристики имеют вид гипербол - рис. 30 б, т.е. стабилизируется мощность, развиваемая двигателем.
Приведенные примеры иллюстрируют богатые возможности получения искусственных механических характеристик любой требуемой формы посредством использования соответствующих обратных связей.
Следует отметить, что в системе источник тока - двигатель замыкание системы позволяет распространить экономный способ регулирования изменением магнитного потока на всю область ω—М, т.е. сделать регулирование двухзонным, с широкими функциональными возможностями.
Однако, следует также иметь в виду, что рассмотренные приемы относятся лишь к получению статических характеристик и не учитывают динамических особенностей системы, которые в ряде случаев могут потребовать дополнительных усилий для получения удовлетворительных результатов.
4. Регулирование угловой скорости в системе управляемый выпрямитель – двигатель постоянного тока независимого возбуждения (УВ - ДПТ).
В настоящее время в различных областях техники наиболее широко применяются регулируемые электроприводы с ДПТ с управляемыми вентильными (тиристорными) выпрямителями (УВ).
Такие приводы выпускаются промышленностью в виде блочных изделий – комплектных тиристорных электроприводов. В однозонных приводах выход УВ подключается к якорю двигателя и регулирование скорости осуществляется за счет изменения напряжения на якоре ДПТ. В двухзонных ЭП используется два УВ, один работает на якорь, а второй – на обмотку возбуждения, и регулирование угловой скорости осуществляется как изменением напряжения на якоре, так и за счет изменения потока возбуждения (напряжения на обмотке возбуждения).
Остановимся на особенностях регулирования напряжения на якоре и обмотке возбуждения ДПТ НВ с помощью УВ.
Основными приборами, применяемыми в управляемых выпрямителях, являются полупроводниковые вентили - диоды и тиристоры. Общим свойством этих приборов является то, что они могут находиться в двух состояниях - открытом и закрытом. В открытом состоянии прямое падение напряжения на вентилях в 102-103 раз меньше, чем напряжения, выделяемые на других элементах схемы (например, среднее значение прямого падения напряжения на тиристоре меньше 1 В). Ток, протекающий через вентили в закрытом состоянии, в 103-104 раз меньше тока в открытом состоянии. Все это позволяет при анализе электромагнитных процессов считать полупроводниковые вентили идеальными ключами и пренебрегать их прямыми падениями напряжения и обратными токами.
Полупроводниковый диод находится в открытом состоянии при прямом напряжении на его аноде (положительном относительно катода) и в закрытом - при отрицательном.
| |
Для переключения тиристора в открытое состояние необходимо подать на его управляющий электрод (относительно катода) положительный управляющий импульс при прямом (положительном относительно катода) напряжении на аноде. Длительность управляющего импульса должна быть такой, чтобы за время его действия ток анода тиристора стал больше тока выключения. Для запирания тиристора необходимо уменьшить ток анода до величины тока выключения или приложить к его аноду обратное (отрицательное относительно катода) напряжение. Ток запирания тиристоров в 103-104 раз меньше его прямого тока, поэтому при анализе работы схем можно считать, что тиристор закрывается при нулевом значении тока анода.
4.1. Однофазный однополупериодный УВ. Фазовый способ регулирования выпрямленного напряжения.
Принцип работы УВ поясним на примере простейшей однофазной однополупериодной схемы УВ (рис. 31), работающей на активную R нагрузку. В этой схеме VS - тиристор, СИФУ - система импульсно-фазового управления. Тиристор служит для выпрямления и регулирования выпрямленного напряжения на нагрузке. СИФУ предназначена для управления моментом отпирания тиристора.
Фазовый способ регулирования основан на управлении моментом отпирания тиристоров, включенных последовательно между источником переменного напряжения и нагрузкой.
| |
На вход силовой части схемы подается переменное сетевое напряжение uc. На управляющий электрод тиристора подаются управляющие импульсы uу, фаза которых относительно сетевого напряжения определяется величиной входного сигнала uвх СИФУ, а частота - равна частоте питающей сети.
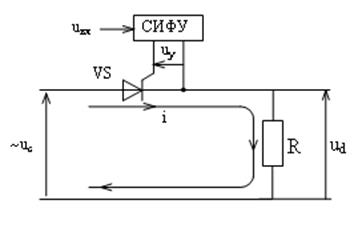
Рис. 31. Однофазная однополупериодная схема УВ, работающего на нагрузку R .
Диаграммы, поясняющие работу схемы, приведены на рис. 32 а. На первой диаграмме приведена зависимость сетевого напряжения uс от угла u (здесь и далее u = w t, рад; w =2 p fc - угловая частота, рад/сек; fс - частота сетевого напряжения, Гц; t - время, с). Напряжение uс изменяется по синусоидальному закону с периодом 2p:

где Um - амплитудное значение сетевого напряжения (  ; Uc - действующее значение сетевого напряжения).
; Uc - действующее значение сетевого напряжения).
На третьей диаграмме приведены управляющие импульсы u у прямоугольной формы. Амплитуда и длительность импульсов выбирается исходя из условия надежного отпирания тиристора. Импульсы формируются СИФУ при положительном напряжении на аноде тиристора (относительно катода) и сдвинуты относительно сетевого напряжения на угол регулирования a (угол запаздывания). Величина угла регулирования зависит от входного сигнала uвх СИФУ.
На пятой и седьмой диаграммах приведены зависимости мгновенных значений напряжения на нагрузке - ud(u) и тока нагрузки - i(u).
Рассмотрим работу схемы на отдельных интервалах.