
Таким образом, регулирование скорости изменением напряжения на якоре является основным способом регулирования w в широкорегулируемых приводах.








Для рассматриваемого способа регулирования длительно допустимый ток якоря и, соответственно, момент ограничены номинальными значениями  , т. е. регулирование w изменением напряжения на якоре осуществляется при постоянном допустимом моменте. Длительно допустимая мощность
, т. е. регулирование w изменением напряжения на якоре осуществляется при постоянном допустимом моменте. Длительно допустимая мощность
 (1.31)
(1.31)
при номинальной угловой скорости равна номинальной  и снижается по мере уменьшения w .
и снижается по мере уменьшения w .
С учетом отмеченных особенностей этот способ регулирования угловой скорости целесообразно использовать для механизмов, момент сопротивления которых остается постоянным при изменении скорости.
Регулирование угловой скорости ДПТ ПВ изменением подводимого напряжения может быть осуществлено так же, как для ДПТ НВ, с помощью отдельного генератора или тиристорного преобразователя. Регулирование ведется уменьшением подводимого напряжения и приводит, как следует из уравнений (1.18), к снижению скорости. В транспортных механизмах часто два тяговых двигателя одинаковой мощности работают как многодвигательный электропривод (например, двухосный тяговый электропривод). При этом появляется дополнительная возможность ступенчатого изменения подводимого к двигателю напряжения за счет переключения двигателей с последовательного на параллельное включение. При последовательном включении на каждый двигатель приходится половина напряжения сети. Когда двигатели подключаются параллельно, каждый из них оказывается включенным на полное напряжение сети. Такое регулирование позволяет исключить нерациональную трату энергии.
Особенности регулирования скорости изменением напряжения на якоре и ослаблением магнитного потока дополнительно поясняет рис. 22. Регулирование угловой скорости изменением напряжения на якоре принято называть первой зоной регулирования, изменением магнитного потока – второй зоной.
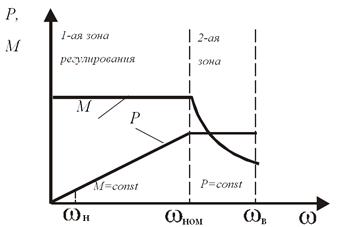
Рис. 22. Изменение характеристик ДПТ ПВ при регулировании скорости изменением напряжения на якоре.
В первой зоне w регулируется вниз от номинальной, допустимый момент двигателя остается постоянным, а допустимая мощность снижается пропорционально уменьшению w.
Во второй зоне w регулируется вверх от номинальной, допустимая мощность остается постоянной, а допустимый момент снижается.
1.6 Тормозные режимы ДПТ НВ
Выше была рассмотрена работа ДПТ в двигательном режиме, когда электрическая энергия, потребляемая от сети, преобразуется в механическую. Характеристики, соответствующие двигательному режиму, располагаются в первом квадрате.
Для быстрой и точной остановки механизмов, при изменении направления вращения и т.д. в современных приводах широко используются тормозные режимы работы электрической машины.
Рассмотрим способы электрического торможения машины постоянного тока независимого возбуждения.
Генераторное торможение с отдачей энергии в сеть.
Если скорость двигателя оказывается выше скорости идеального холостого хода  (см. рис.23), то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения
(см. рис.23), то ЭДС машины становится больше напряжения сети. Ток якоря, как следует из уравнения

становится отрицательным. Следовательно, меняется и знак момента – он становится тормозным. Машина работает в генераторном режиме: механическая энергия, поступающая со стороны вала машины, преобразуется в электрическую и отдается в сеть.
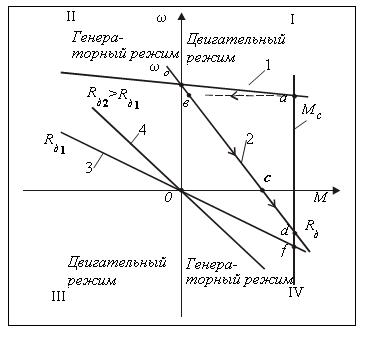
Рис. 23. Тормозные режимы ДПТ НВ
Характеристики генераторного режима с отдачей (рекуперацией) энергии являются продолжением характеристик двигательного режима и располагаются во II квадрате.
Генераторный режим торможения используется, например, в приводах транспортных и подъемных механизмов при спуске грузов. Способ весьма экономичен, т.к. энергия отдается в сеть.
Торможение противовключением
Предположим, что электропривод грузоподъемного механизма работает на естественной характеристике 1 (см. рис. 23) с моментом статического сопротивления  . Установившийся режим соответствует т. а – происходит подъем груза. Допустим, что далее в цепь якоря вводят добавочное сопротивление
. Установившийся режим соответствует т. а – происходит подъем груза. Допустим, что далее в цепь якоря вводят добавочное сопротивление  . В первый момент угловая скорость электропривода вследствие механической инерционности остается неизменной, и двигатель переходит на характеристику 2, т. в. Момент двигателя уменьшается и скорость
. В первый момент угловая скорость электропривода вследствие механической инерционности остается неизменной, и двигатель переходит на характеристику 2, т. в. Момент двигателя уменьшается и скорость  начинает снижаться. В т. с скорость становится равной нулю, а затем направление вращения двигателя изменяется. Новый установившийся режим наступает в т. d. При этом происходит спуск груза в режиме торможения противовключением (процесс перехода показан на рис. 23 стрелками). При изменении направления вращения меняется знак ЭДС –двигателя, она складывается с питающим напряжением, и ток якоря определяется выражением
начинает снижаться. В т. с скорость становится равной нулю, а затем направление вращения двигателя изменяется. Новый установившийся режим наступает в т. d. При этом происходит спуск груза в режиме торможения противовключением (процесс перехода показан на рис. 23 стрелками). При изменении направления вращения меняется знак ЭДС –двигателя, она складывается с питающим напряжением, и ток якоря определяется выражением
 .
.
Для ограничения тока якоря до приемлемого значения в этом режиме в цепь якоря необходимо вводить добавочное сопротивление  .
.
Таким образом, в режиме противовключения направление вращения машины противоположно заданному, машина работает в режиме генератора и создает тормозной момент. Энергия выделяется на , следовательно, этот режим торможения мало экономичен.
Режим торможения противовключением часто используется в реверсивных приводах для быстрого реверса двигателя или остановки. Если на якоре двигателя, работающего в условном направлении «Вперед», поменять полярность напряжения, то он перейдет в режим торможения противовключением. Начнется интенсивное затормаживание электропривода. Для ограничения тока в якорную цепь при этом приходится вводить добавочное сопротивление. Если необходимо снизить скорость двигателя до нуля, то при близкой к нулю с помощью схемы управления якорь двигателя отключают от сети. В противном случае двигатель будет разгоняться до нового установившегося режима в направлении «Назад».
В принципе возможен реверс электродвигателя и за счет изменения полярности напряжения на обмотке возбуждения. Однако, инерционность процессов в цепи обмотки возбуждения намного больше, чем в цепи якоря. Это замедляет процесс реверса. Кроме того, в переходном процессе магнитный поток снижается и переходит через нуль, что приводит к уменьшению тормозного момента.
Динамическое торможение.
Чтобы перевести машину в режим динамического торможения якорь отключают от сети и замыкают на добавочное сопротивление . Обмотка возбуждения LM должна оставаться подключенной к сети (см. рис. 24).
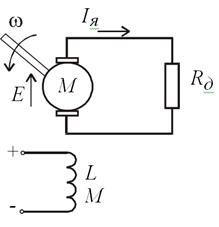
Рис. 24. Схема включения якорной цепи ДПТ в режиме динамического торможения.
Машина в этом случае работает в режиме генератора. Механическая энергия, поступающая со стороны вала, преобразуется в электрическую и выделяется в виде тепла в сопротивлениях цепи якоря. Следовательно, режим не экономичен. Уравнение механической характеристики несложно получить из (1.7), приняв  :
:
 .
.
Откуда для тормозного момента двигателя получим
 .
.
Из этого соотношения следует: во-первых, момент становится тормозящим (отрицательным); во–вторых, момент возрастает с увеличением скорости ; в третьих, тормозной момент при отрицательном значении тем больше, чем меньше (см. характеристики 3, 4 на рис. 23).
Динамическое торможение используется, в частности, в подъемных механизмах при спуске грузов. Например, при работе двигателя на характеристике 3 (см. рис. 23) и моменте  , создаваемым грузом, будет происходить спуск груза со скоростью, определяемой т. f.
, создаваемым грузом, будет происходить спуск груза со скоростью, определяемой т. f.
Кроме того, динамическое торможение широко используется для быстрой остановки двигателя. Для этого с помощью схемы управления якорь двигателя отключают от сети и замыкают на добавочное сопротивление. Эффективность торможения здесь ниже, чем в режиме противовключения, т.к. по мере снижения уменьшается и тормозной момент.