
С учетом этого говорят, что регулирование угловой скорости ослаблением магнитного потока ведется при постоянной допустимой мощности .








Расчет искусственных характеристик при известной величине потока Ф несложен. По формулам рассчитывается скорость идеального холостого хода w 0, при номинальном моменте – падение скорости D w. Сложность представляет расчет тока возбуждения i в по известному потоку Ф, когда не приводится кривая намагничивания. При отсутствии собственной кривой приходится применять для расчетов универсальную кривую намагничивания, приводимую в справочниках.
Рассматриваемый способ регулирования достаточно удобен и экономичен, т.к. мощность в цепи возбуждения двигателя значительно меньше, чем в цепи якоря.
Диапазон регулирования D ф изменением магнитного потока определяется отношением наибольшей угловой скорости w В к скорости w н =w 0 (см. рис. 19), соответствующей естественной характеристике. Предельное значение D ф составляет 4…5 и ограничено, в основном, коммутационной устойчивостью машины.
Регулирование угловой скорости ДПТ ПВ ослаблением потока возбуждения позволяет, как и для ДПТ НВ, получить скорости выше основной. Действительно, как следует из уравнения (1.26), уменьшение потока Φ приводит при том же токе якоря к возрастанию первого слагаемого. Ослабление потока возбуждения обычно осуществляют за счет шунтирования обмотки возбуждения добавочным сопротивлением.
Из анализа механических характеристик ДПТ ПВ следует, что они являются весьма удобными для электрической тяги (трамвай, метро, троллейбус, электровозы, тепловозы) и подъемных механизмов по следующим соображениям:
- Двигатель имеет низкую скорость при больших нагрузках и высокую - при малых, тем самым обеспечивается естественное регулирование скорости движения при изменении сопротивления перемещению;
- Транспортные и грузоподъемные механизмы требуют больших начальных моментов при пуске, именно такие моменты обеспечивает ДПТ ПВ; у ДПТ НВ момент пропорционален току: М~I, а у двигателей последовательного возбуждения М~I2. А так как при пуске двигателя I = (1,5-2,0)Iн, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с ДПТ НВ;
- Момент ДПТ ПВ не зависит от напряжения питающей сети, что особенно важно для электрической тяги, где в контактной сети могут возникать большие отклонения напряжения.
Основным недостатком ДПТ ПВ является неограниченной возрастание скорости при малых токах якоря и, как следствие, невозможность обеспечить режим генераторного торможения.
1.5.3 Регулирование угловой скорости двигателя изменением напряжения на якоре
Схема включения машины для этого способа регулирования приведена на рис. 20. Здесь необходим управляемый преобразователь (УП), с помощью которого изменяется напряжение U на якоре в функции задающего сигнала U зд.
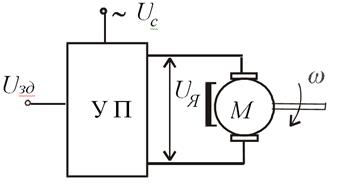
Рис. 20. Схема включения ДПТ НВ при регулировании скорости изменением напряжения на якоре.
На рис. 20. показана машина с возбуждением от постоянных магнитов. В случае, когда машина имеет электромагнитное возбуждение, обмотка возбуждения подключается к независимому нерегулируемому преобразователю. Регулирование w ведется при номинальном потоке возбуждения Ф = Фном, и для анализа удобно использовать уравнения (1.11), (1.12):
 (1.29)
(1.29)
 (1.30)
(1.30)
Первый член в этих уравнениях определяет угловую скорость двигателя на холостом ходу. Изменяя напряжение на якоре в сторону снижения, можно на холостом ходу получать скорости  и т.д., т.е. регулировать скорость вниз от номинальной. Второй член в уравнениях электромеханической (1.29) и механической (1.30) характеристик определяет падение скорости
и т.д., т.е. регулировать скорость вниз от номинальной. Второй член в уравнениях электромеханической (1.29) и механической (1.30) характеристик определяет падение скорости  под нагрузкой. Характеристики при различных значениях напряжения на якоре располагаются взаимно параллельно (см. рис. 21).
под нагрузкой. Характеристики при различных значениях напряжения на якоре располагаются взаимно параллельно (см. рис. 21).
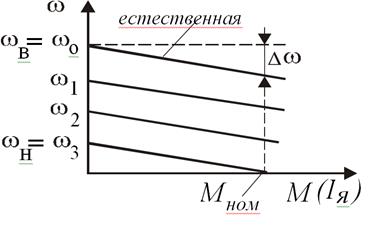
Рис. 21. Регулирование характеристик ДПТ НВ изменением напряжения якоря.
Жесткость механической характеристики остается постоянной.
Расчет искусственных характеристик в о.е. при изменении напряжения U следующий: необходимо рассчитать скорость холостого хода в относительных единицах и полученную величину отложить в масштабе при М=0. Искомое напряжения U определяется из формулы
При регулировании w изменением напряжения на якоре в разомкнутой системе (см. рис.20) нижняя скорость  ограничена падением скорости от нагрузки. Так, если задать на холостом ходу угловую скорость
ограничена падением скорости от нагрузки. Так, если задать на холостом ходу угловую скорость  , то при номинальном моменте двигатель будет останавливаться. В замкнутых системах, падение скорости может быть сведено до достаточно малых значений. В результате удается получить диапазон регулирования скорости изменением напряжения на якоре D и =1000 ... 10000.
, то при номинальном моменте двигатель будет останавливаться. В замкнутых системах, падение скорости может быть сведено до достаточно малых значений. В результате удается получить диапазон регулирования скорости изменением напряжения на якоре D и =1000 ... 10000.