
3. разбивается Rдоб на ступени, обеспечивая правильную пусковую диаграмму.








Современные станции управления выпускают с двумя – тремя ступенями. При увеличении числа ступеней растут габариты и стоимость установки, но снизить время пуска не удается, так как каждый аппарат обладает конечным быстродействием.
При ω = ω1 токи якоря
 ,
,  , тогда
, тогда  .
.
При ω = ω2 токи якоря
 ,
,  , тогда
, тогда  .
.
В общем случае и при большем числе ступеней отношение токов и сопротивлений остается величиной постоянной
 ,
,
откуда  . Необходимо убедиться, что M 2 ≥ 1,2∙ Mc.
. Необходимо убедиться, что M 2 ≥ 1,2∙ Mc.
Таким образом, для разбиения R доб = R 1 на ступени задаемся током I 1, числом ступеней m и определяем λ = I 1 / I 2. По величине λ рассчитываем полные сопротивления на пусковых характеристиках.
Сопротивления ступеней:
 ;
;  .
.
Расчет правильной пусковой диаграммы можно выполнить графическим методом. Отметим, что для двигателей с нелинейными механическими характеристиками графический метод является наиболее удобным. Расчет графическим методом проще вести в относительный единицах (о.е.).
1. Строится естественная механическая характеристика (рис. 17).
2. Задаемся токами I 1 и I 2 (или моментами M 1 и M 2).
3. Методом подбора строится правильная пусковая диаграмма таким образом, чтобы переход на естественную характеристику совпал с моментом M 1. Если моменты не совпали, вновь задаются моментом переключения M 2 и повторяют построение.
4. После построения правильной пусковой диаграммы при M = 1 измеряют отрезки, пропорциональные добавочным сопротивлениям в долях от известной величины сопротивления якоря
ab ≡ r я , bc ≡ R 3доб , cd ≡ R 2доб , de ≡ R 1доб,
и рассчитывают сопротивления ступеней
 ,
,  ,
,  .
.
Рис. 17. Расчет правильной пусковой диаграммы графическим методом.
1.5.2 Регулирование скорости вращения ДПТ независимого и последовательного возбуждения изменением магнитного потока
Схема подключения двигателя для рассматриваемого способа регулирования приведена на рис. 18 а. Обмотка возбуждения  двигателя подключена к управляемому преобразователю
двигателя подключена к управляемому преобразователю  , с помощью которого изменяется напряжение возбуждения
, с помощью которого изменяется напряжение возбуждения  и, соответственно магнитный поток Ф. На якорь двигателя подается напряжение
и, соответственно магнитный поток Ф. На якорь двигателя подается напряжение  от неуправляемого преобразователя П.
от неуправляемого преобразователя П.
Возможна и иная схема (см. рис. 18 б) – обмотку возбуждения подключают к неуправляемому преобразователю или сети постоянного тока через реостат R, с помощью которого регулируют ток возбуждения и магнитный поток.
 |  | ||
Для анализа удобно воспользоваться уравнениями электрической и механической характеристик в форме (1.2), (1.7). Учитывая, что напряжение на якоре остается номинальным, а добавочное сопротивление в цепи якоря равно нулю, указанные уравнения можно переписать в виде
а ) б)
Рис. 18. Схема подключения ДПТ НВ при регулировании скорости изменением магнитного потока.
 (1.27)
(1.27)
 (1.28)
(1.28)
Несложно заметить, что угловая скорость на холостом ходу (первый член уравнений) при уменьшении (ослаблении) магнитного потока Ф увеличивается, что позволяет получить (см. рис. 19) характеристики, расположенные выше естественной.
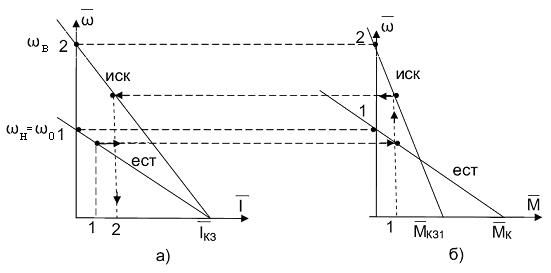
Рис. 19. Электромеханические а) и механические б) характеристики (в о.е.) при изменении потока Ф.
Второй член в приведенных уравнениях – падение угловой скорости под нагрузкой тем больше, чем больше ослаблен магнитный поток. Следовательно, жесткость характеристик тем ниже, чем больше ослаблен магнитный поток. Причем, падение скорости на механической характеристике зависит от Ф2, т.е. при ослаблении магнитного потока, например, в 2 раза падение угловой скорости при том же моменте увеличивается в 4 раза.
Как видно из рис. 19, момент двигателя M = k Ф I прямо пропорционален потоку, и значение Мкз снижается при уменьшении потока до Мкз1. Обычно изменение потока выполняют для скоростей выше естественной характеристики, U = U н и R = r я. В этом случае I кз =(10…20) I н и зона допустимой работы двигателя по условиям коммутации I доп =(2…2,5) I н располагается выше естественной характеристики.