
II . Методические указания к проведению лабораторных работ








М.1. Организация и порядок проведения лабораторных работ
М.2. Техника безопасности при работе в лаборатории электрического привода
М.3. Обработка результатов эксперимента и оформление отчета по лабораторной работе
Лабораторная работа 1. ДПТ
Лабораторная работа 2. ЭП системы “Источник ЭДС – ДПТ независимого \ последовательного \ параллельного возбуждения”
Лабораторная работа 3. ЭП системы “ТП – ДПТ независимого \ последовательного \ параллельного возбуждения”
Лабораторная работа 4. ЭП системы “Реверсивный ТП – ДПТ независимого возбуждения”
Предисловие
В учебно-методическом пособии даны основные теоретические сведения о конструкции и работе двигателя постоянного тока с независимым, параллельным, последовательным и смешенным возбуждением, а также электрических приводов на его основе. Рассмотрены вопросы регулирования координат электропровода в разомкнутых и замкнутых структурах. Представлен перечень лабораторных работ по курсу «Электрический привод» для студентов специальностей «Электропривод и автоматика промышленных установок и технологических комплексов», который может также выборочно использоваться студентами других специальностей, имеющих в своих рабочих программах курсы, изучающие электропривод и автоматизацию производственных и общепромышленных механизмов.
В учебно-методическом пособии освещены вопросы описания лабораторных работ и стендов, на которых эти работы проводятся, приводятся технические характеристики электрооборудования, входящего в состав стендов, дан порядок и методика проведения лабораторных работ, а также правила обработки результатов исследований и представления отчетов.
В пособие освещены вопросы техники безопасности при выполнении работ, даны указания по оформлению отчетов, организации и проведению исследований и подготовке к лабораторным занятиям.
Настоящее «Пособие» включает 4 лабораторные работы по данному курсу и предназначено для студентов электротехнических специальностей после усвоения теоретического материала по каждой теме курса.
«Пособие» подготовлено при поддержке Федерального Агентства РФ по науке и инновациям, ГК (№ 02.740.11.0395, № 02.740.11.5179), Федерального агентства РФ по образованию, ГК (П1156, П1220) и программы “Развитие научного потенциала высшей школы”, задание № 2.1.1./4978.
I . Основные теоретические сведения
1. Двигатель постоянного тока
Двигатель постоянного тока (ДПТ) состоит из трех основных частей: статора с обмоткой возбуждения, ротора с якорной обмоткой и щеточно-коллекторного узла, необходимого для подведения напряжения к обмотке якоря (далее ОЯ). При этом щетки неподвижны, а коллектор жестко связан с якорем.
В ДПТ для улучшения условий коммутации могут быть также предусмотрены и дополнительные полюса, а для компенсации поперечной реакции якоря и компенсационные обмотки на полюсах статора.
На рис. 1 показано устройство двигателя постоянного тока. К станине 6 болтами крепят главные полюсы, состоящие из сердечника 4 и катушки обмотки возбуждения 5. С торцовых сторон к станине крепят боковые щиты 7 с подшипниками, удерживающими вал машины. Якорь машины состоит из сердечника 3, обмотки 9 и коллектора 1. На валу якоря укреплен вентилятор 8, на коллекторе помещены неподвижные щетки 2.
Рис. 1. Устройство двигателя постоянного тока.
В зависимости от способа электромагнитного возбуждения ДПТ подразделяют на ДПТ с независимым (НВ), последовательным (ПВ) и смешанным (СВ) возбуждением. Иногда встречается название «ДПТ с параллельным возбуждением», однако такой ДПТ является частным случаем ДПТ с независимым возбуждением, и этот термин применяется как доопределяющий.
1.1 Уравнение электромеханической характеристики ДПТ с НВ
Схема включения ДПТ с НВ представлена на рис. 2
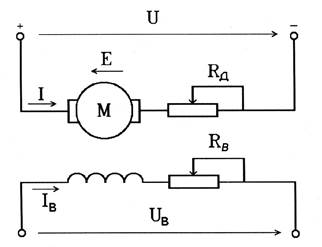
Рис. 2. Схема включения ДПТ с НВ.
Для ДПТ с НВ справедлива система уравнений, описывающая его статическое состояние:

 (1.1)
(1.1)

где  - напряжение питания якорной цепи, В;
- напряжение питания якорной цепи, В;  - суммарное сопротивление якорной цени, Ом,
- суммарное сопротивление якорной цени, Ом,  ,
,  - сопротивления обмотки якоря,
- сопротивления обмотки якоря,  - добавочное сопротивление в цепи якоря;
- добавочное сопротивление в цепи якоря;  - электромагнитный момент, Н•м;
- электромагнитный момент, Н•м;  ток якоря, А;
ток якоря, А;  - угловая скорость вращения двигателя, рад/с;
- угловая скорость вращения двигателя, рад/с;  - ЭДС вращения якоря, В;
- ЭДС вращения якоря, В;  и
и  - коэффициенты пропорциональности;
- коэффициенты пропорциональности;  - постоянная ДПТ (
- постоянная ДПТ (  - число пар полюсов;
- число пар полюсов; 
 - число активных проводников обмотки якоря;
- число активных проводников обмотки якоря;  - число пар параллельных ветвей обмотки якоря );.
- число пар параллельных ветвей обмотки якоря );.
При использовании системы СИ имеет место численное равенство коэффициентов пропорциональности, которые можно обозначить  :
:  , где
, где  - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя,  - магнитный поток, Вб.
- магнитный поток, Вб.
Решая совместно первые два уравнения в системе (1.1) можно получить уравнение электромеханической характеристики ДПТ, которое определяет зависимость  :
:
 (1.2)
(1.2)
1.1.1 Графическое изображение электромеханической характеристики
Из пропорциональной связи между и следует, что графики механической и электромеханической характеристик ДПТ с НВ при соответствующем масштабировании по оси абсцисс величин и совпадают, поэтому часто обозначение оси абсцисс приводится как  .
.
Из анализа уравнения электромеханической характеристики (1.2) следует, что она может быть представлена прямой линией (рис. 3) при неизменных , и .
Характеристика, полученная при номинальном значении напряжения на якоре U ном , номинальном магнитном потоке Фном и отсутствие внешних резисторов в якорной цепи, называется естественной. При изменении хотя бы одного из указанных параметров электромеханическая характеристика называется искусственной. Таким образом, ДПТ с НВ обладает лишь одной естественной характеристикой и множеством искусственных.
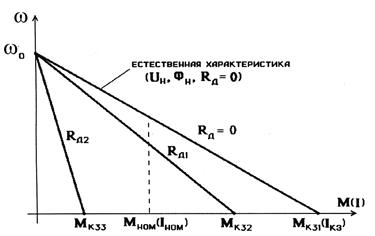
Рис. 3. Механические (электромеханические) характеристики ДПТ с НВ в двигательном режиме при различных значениях добавочного сопротивления  <
<  .
.
1.1.2 Анализ уравнений электромеханической характеристики
Скорость холостого хода
При  имеет место режим идеального холостого хода и при этом
имеет место режим идеального холостого хода и при этом
 (1.3)
(1.3)
Ток короткого замыкания
С увеличением нагрузки на валу ДПТ возрастает и ток якоря , т.к.  , а это в свою очередь ведет к снижению . Если к якорю подведено напряжение, то при
, а это в свою очередь ведет к снижению . Если к якорю подведено напряжение, то при  имеет место режим короткого замыкания, при котором, как следует из (1.2), ток короткого замыкания (называемый также пусковым током)
имеет место режим короткого замыкания, при котором, как следует из (1.2), ток короткого замыкания (называемый также пусковым током)
 . (1.4)
. (1.4)
Максимальное значение тока короткого замыкания имеет место при  , когда
, когда  , и оно может в десятки раз превышать величину номинального значения
, и оно может в десятки раз превышать величину номинального значения  тока якоря двигателя, т. к. величина сравнительно малая.
тока якоря двигателя, т. к. величина сравнительно малая.
Реально режим короткого замыкания имеет место кратковременно, при пуске двигателя и при стопорении двигателя моментом сопротивления.
Ограничение величины 
При прямом пуске двигателя значения тока  , поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла.
, поэтому якорная обмотка может быстро перегреться и выйти из строя. Кроме того, большие токи негативно влияют и на работоспособность щеточно-коллекторного узла.
Это обуславливает необходимость ограничения до допустимой величины либо введением дополнительного сопротивлений в якорную цепь , либо уменьшением значения питающего напряжения .
Величина максимально допустимого тока  определяется коэффициентом перегрузки по току
определяется коэффициентом перегрузки по току
 , (1.5)
, (1.5)
обычно принимающим значения от 2 до 5, в зависимости от типа двигателя.
Максимально допустимый ток короткого замыкания должен соответствовать неравенству
 . (1.6)
. (1.6)
Для микродвигателей обычно осуществляется прямой пуск без добавочных сопротивлений, но с ростом габаритов ДПТ необходимо производить реостатный пуск, особенно если привод с ДПТ используется в напряженных режимах с частыми пусками и торможениями.
Практически следует помнить, что, если не ограничивать пусковые токи, то частыми пусками можно сжечь обмотку якоря ДПТ.
С введением в цепь якоря жесткость электромеханической характеристики уменьшается, что и видно на рис. 3.
1.1.3 Уравнение механической характеристики ДПТ с НВ
С учетом третьего уравнения в (1.1) уравнение (1.2) можно переписать в виде зависимости  - которая представляет собой механическую характеристику ДПТ:
- которая представляет собой механическую характеристику ДПТ:
 (1.7)
(1.7)
Данное уравнение определяет зависимость угловой скорости вращения от момента на валу двигателя. Т.к. в статике вращающий момент равен моменту сопротивления  на налу ДПТ, то это уравнение определяет зависимость от .
на налу ДПТ, то это уравнение определяет зависимость от .
Следует отметить, что величина электромагнитного момента превышает выходной момент на валу на величину, соответствующую потерям в стали и механическим потерям от трения, но в большинстве практических расчетов указанными потерями можно пренебречь.
Коэффициент пропорциональности  можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину . В общем же случае влияние поперечной реакции якоря на величину магнитного потока ведет к нарушению линейности механической характеристики по мере увеличения тока.
можно считать постоянным для тех ДПТ с НВ, у которых имеются компенсационные обмотки или в случае, когда можно пренебречь влиянием реакции якоря на величину . В общем же случае влияние поперечной реакции якоря на величину магнитного потока ведет к нарушению линейности механической характеристики по мере увеличения тока.
1.1.4. Графическое изображение механической характеристики
Из выражения (1.7) следует, что графически механическая характеристика ДПТ с НВ может быть представлена прямой линией с двумя характерными точками - скоростью холостого хода w 0 и моментом короткого замыкания  , который также называется пусковым. Величина определяется по формуле
, который также называется пусковым. Величина определяется по формуле
 (1.8)
(1.8)
C введением добавочного сопротивления в цепь якоря жесткость механических характеристик также падает, что с успехом используется при регулировании скорости вращения ДПТ.
По аналогии с электромеханическими характеристиками различают естественную и искусственные механические характеристики.
Жесткость естественной характеристики определяется только сопротивлением якорной цепи двигателя:
 или
или  . (1.9)
. (1.9)
Снижение скорости под нагрузкой объясняется следующим. При увеличении момента сопротивления механизма угловая скорость начинает снижаться. В результате уменьшается ЭДС Е согласно системе (1.1). Ток якоря при этом увеличивается. Соответственно возрастает момент двигателя. Этот процесс продолжается до тех пор, пока момент двигателя не сравняется с моментом сопротивления. После достижения равенства М=Мс наступит новый установившийся режим с меньшей угловой скоростью .
При инженерных расчетах коэффициенты, входящие в уравнения характеристик двигателя, могут быть определены через номинальные параметры двигателя, приводимые в каталогах. При номинальном магнитном потоке
 (1.10)
(1.10)
Здесь коэффициент Кд - коэффициент передачи двигателя, его размерность  . С использованием этого понятия уравнения (1.2), (1.7) могут быть переписаны в виде:
. С использованием этого понятия уравнения (1.2), (1.7) могут быть переписаны в виде:
 (1.11)
(1.11)
 (1.12)
(1.12)
В этих уравнениях, как и в (1.2, 1.7), первый член представляет собой угловую скорость идеального холостого хода, а второй – падение скорости от нагрузки:
 ,
,  (1.13)
(1.13)
или
 (1.14)
(1.14)
1.2 Характеристики и режимы ДПТ при последовательном возбуждении
В электроприводах постоянного тока иногда используются двигатели с последовательным возбуждением, когда специально выполненная обмотка возбуждения включена последовательно с обмоткой якоря - рис. 4
Рис. 4. Схема двигателя постоянного тока последовательного
возбуждения
Для двигателя последовательного возбуждения, как и для других двигателей постоянного тока при питании якоря от источника напряжения (U=const), справедливы уравнения (1.4) и (1.5), однако, если для двигателя независимого возбуждения поток не зависит от тока нагрузки, то для двигателя последовательного возбуждения поток является функцией тока нагрузки.
Зависимость Ф = j (I) - характеристика намагничивания - не имеет простого аналитического выражения, ее примерный вид изображен на рис. 5.
Рис. 5. Характеристика намагничивания машины постоянного тока
В первом приближении зависимость между скоростью двигателя и развиваемым им моментом в установившемся режиме можно найти в предположении, что поток возбуждения и ток в якоре двигателя связаны между собой линейной зависимостью (пунктир на рис. 5):
 .(1.15)
.(1.15)
Тогда
 , (1.16)
, (1.16)
а поскольку
M = kФI = k a I2,(1.17)
то
 .(1.18)
.(1.18)
Таким образом, при сделанном допущении механическая характеристика двигателя последовательного возбуждения изображается гиперболой (рис. 6); одной из ее асимптот является ось ординат, а другой - прямая, параллельная оси абсцисс,
 .(1.19)
.(1.19)
Рис. 6. Механическая характеристика двигателя последовательного
возбуждения
Жесткость механической характеристики  двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки.
двигателя последовательного возбуждения переменна и возрастает с увеличением нагрузки.
Полученные уравнения дают лишь общее представление о характеристиках электропривода с двигателем последовательного возбуждения, так как в действительности магнитная система машины насыщена и кривая намагничивания весьма далека от прямой. Поэтому в практических целях обычно пользуются универсальными характеристиками для серии машин - рис. 7, построенными в относительных величинах

 ,
, 
где  , Iн и Мн - номинальные величины двигателя, Rдоп = 0.
, Iн и Мн - номинальные величины двигателя, Rдоп = 0.
Рис. 7. Характеристики двигателя последовательного возбуждения в
относительных величинах.
Электропривод с двигателями последовательного возбуждения в нормальной схеме (U=const) может работать в тех же энергетических режимах, что и привод с двигателями независимого возбуждения, за исключением режима идеального холостого хода и генераторного режима параллельно с сетью (рекуперативное торможение), поскольку при нагрузке, стремящейся к нулю, к нулю стремится и магнитный поток, ось  - асимптота механической характеристики.
- асимптота механической характеристики.
Некоторые особенности при последовательном возбуждении имеет режим динамического торможения.
Если якорь вращающейся машины отключить от источника напряжения и замкнуть на внешний резистор (рис. 8, схема слева), то под действием потока остаточного магнетизма (Фост на рис. 5) в проводниках якоря возникает некоторая ЭДС Еост, которая вызовет в замкнутой цепи ток. Этот ток, протекая по обмотке возбуждения в обратном против исходного направления размагнитит машину (Ф = 0) и тормозного момента создано не будет.
Рис. 8. К режиму динамического торможения с самовозбуждением
Для того, чтобы получить тормозной момент, ток, созданный Еост, должен протекать в том же, что и раньше, направлении, усиливая магнитный поток, т.е. создавая самовозбуждение. Это условие выполнится, если при переходе на режим торможения переключить обмотку возбуждения как показано на рис. 8, схема справа.
Ток, создаваемый увеличивающейся ЭДС, изменит знак, момент будет направлен против движения, т.е. станет тормозным.
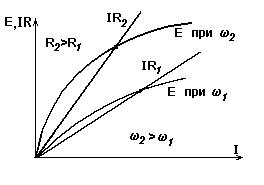
Работа машины постоянного тока с самовозбуждением возможна лишь при определенных условиях, а именно при таких значениях скорости и сопротивления R цепи якоря, чтобы имело место равенство
 (1.23)
(1.23)
Существованию этого равенства отвечает наличие точки пересечения кривых  (при данной скорости) и прямой IR = f(I) - рис. 9 a. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.
(при данной скорости) и прямой IR = f(I) - рис. 9 a. Очевидно, что чем больше R, тем при большей скорости произойдет самовозбуждение машины.
а) б)
Рис. 9. Характеристики динамического торможения с
самовозбуждением
Наименьшая скорость, при которой машина может самовозбуждаться, будет при Rдоб = 0, то есть при замкнутой накоротко якорной цепи машины.
Построение механической характеристики в режиме динамического торможения при самовозбуждении можно произвести, исходя из уравнения баланса мощностей.
Мощность, развиваемая двигателем в режиме динамического торможения, целиком рассеивается в сопротивлениях якорного контура, то есть
(-I)2R = - M w,
откуда
 . (1.24)
. (1.24)
Зная R и задаваясь током I, по универсальной характеристике определяют соответствующий этому току момент М, вычисляют скорость ω и т.д. Характер зависимой ω ( M ) в тормозном режиме при самовозбуждении изображен на рис. 9 б.
В электроприводах постоянного тока иногда используются двигатели смешанного возбуждения, имеющие две обмотки возбуждения, одна из которых включена последовательно в якорную цепь, а другая имеет независимое питание.
Двигатели последовательного возбуждения могут получать питание не только от источника напряжения, что было рассмотрено выше, но и от источника тока. Поскольку при этом магнитный поток будет неизменным, сохраняются и основные свойства электропривода, рассмотренные ранее.
1.3 Зоны допустимых нагрузок
Главное требование к любой технической системе является требование надежности, т.е. необходимо, чтобы в процессе работы ни одна из переменных не превысила допустимого значения. Режим работы и значения номинальных значений координат электрической машины всегда указывают в каталожных данных. Значение номинального напряжения обусловлено электрической прочностью изоляции машины; значения номинальных токов и мощности определены условиями нагрева ответственных элементов машины; значение номинальной частоты вращения связано с механической прочностью элементов конструкции, подшипниками и т.п.; номинальный КПД оценивает эффективность преобразования энергии в номинальном режиме.
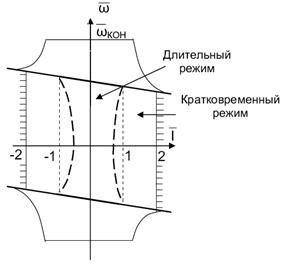
Рис. 10. Зоны допустимых нагрузок
(скорость и ток представлены в относительных единицах).
На рис. 10 показаны зоны допустимых нагрузок двигателя. Как видно, в продолжительном режиме работы двигателя с независимым охлаждением, ток на всех скоростях не должен превышать номинального значения (тонкий пунктир на рис. 10). В двигателях, охлаждаемых собственным вентилятором, в продолжительном режиме необходимо снижать ток на 30-40% при низких скоростях (жирный пунктир на рис. 10) во избежание недопустимого перегрева. Кратковременные (секунды) перегрузки по току ограничиваются условиями коммутации машины; допустимые перегрузки обычно не превышают (2-3)Iн (линии со штриховкой на рис. 10). Из изложенного следует недопустимость пуска электропривода постоянного тока (кроме микроприводов) прямым включением на номинальное напряжение.
1.4 Энергетические режимы работы двигателя
Электрическая машина обладает так называемым свойством обратимости, в соответствии с которым она может работать как двигателем, преобразуя электрическую энергию в механическую, так и генератором, осуществляя обратное преобразование энергии. При этом переход из одного режима в другой может происходить без изменения схемы включения.
Рассмотрим режимы работы двигателя на различных участках его характеристик (рис. 11) при положительной полярности напряжения U .
Режиму холостого хода соответствует точка «а» характеристики. Двигатель не получает энергии ни из энергетической сети, ни с вала. В этом режиме I =0, E = U = k Ф w 0 , M =0, ω = w 0 .
Двигательному режиму соответствует участок «ac» характеристики при скорости 0< ω < ω 0 , т.е. в первом квадранте, где ω и М совпадают по направлению. В этом режиме E < U, ток якоря I =( U - E )/ R совпадает по направлению с напряжением сети U и не совпадает с ЭДС двигателя, электрическая энергия ЭЭ поступает из сети, а механическая энергия МЭ с вала двигателя передается исполнительному органу.
Генераторный режим работы машины параллельно с сетью, или торможение с рекуперацией энергии в сеть, имеет место на участке «ab» характеристики. На нем ω > ω 0, поэтому ЭДС больше напряжения сети, ток и момент изменяют свои направления на противоположные. Двигатель получает механическую энергию от рабочей машины и отдает ее в виде электроэнергии в сеть.
Режим короткого замыкания имеет место при ω =0 и E =0. В этом режиме I = I кз = U / R , электрическая энергия ЭЭ поступает из сети, рассеивается в виде тепла в резисторах якорной цепи.
Режим генератора при последовательном соединении с сетью, или торможение противовключением, наступает при ω <0 (участок «cd» характеристики). За счет изменения направления скорости ЭДС меняет свою полярность. Ток в якоре совпадает по направлению с напряжением и ЭДС и определяется суммарным действием, т.е. I =( U + E )/ R . В результате этого электроэнергия поступает из сети и вырабатывается самим двигателем за счет механической энергии рабочей машины и рассеивается в виде тепла в резисторах цепи якоря.
Режим автономного генератора, или динамическое торможение. Ток в якоре протекает под действием ЭДС и совпадает с ней по направлению. Электроэнергия вырабатывается за счет поступающей с вала механической энергии рабочей машины и рассеивается в виде тепла в резисторах якорной цепи.
Рис. 11. Механические (электромеханические) характеристики ДПТ с НВ, при U = const .
Схемы, иллюстрирующие энергетические режимы работы двигателя, представлены на рис. 12.
Эффективность электромеханического преобразования энергии двигателя оценивается КПД (h), который определяется отношением полезной механической мощности на его валу P мех = Mω к потребляемой из сети электрической мощности P эл = UI + U в I в:
 ,
,
где D P – потери мощности в двигателе.
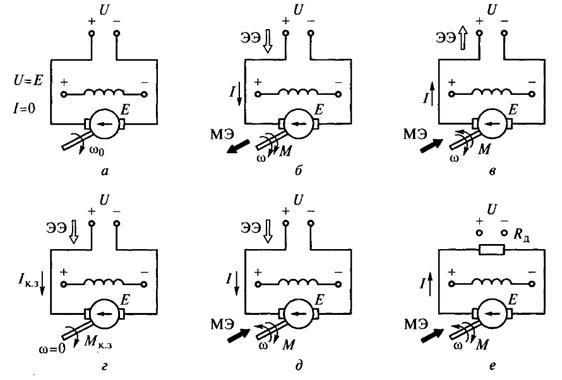
Рис. 12. Схемы, иллюстрирующие энергетические режимы работы двигателя: а – режим холостого хода; б – двигательный режим; в – генераторный режим параллельно с сетью; г – режим короткого замыкания; д – генераторный режим последовательно с сетью; е – генераторный режим независимо от сети.