
Тема 12. Автоматизация измерений








12.1 Общие сведения
В современном производстве необходимо контролировать одновременно сотни, а иногда и тысячи физических величин, что явилось основной причиной создания информационно- измерительных систем (ИИС).
По функциональному назначению ИИС делят на измерительные системы, системы автоматического контроля (САК) и системы технической диагностики (СТД).
В последнее время применяются информационно-управляющие комплексы - вид ИИС, в которых ЭВМ, используется не только для обработки результатов измерения, но и управления объектом.
Агрегатно-модульный принцип построения ИИС предполагает применение стандартных интерфейсов, под которыми понимают как совокупность правил протоколов и программного обеспечения процесса обмена информацией, так и технические средства сопряжения модулей в системе. Наиболее распространенными для ИИС в настоящее время являются приборный интерфейс МЭК 625.1 и функциональный интерфейс КАМАК. Первый используется для медленно действующих систем, а второй применяется для объектов с быстропротекающими процессами.
В зависимости от способа организации передачи информации между функциональными узлами (ФУ), являющимися приемниками и передатчиками информации, различают цепочечную, радиальную и магистральную структуры ИИС.
В ИИС с цепочечной структурой передача информации осуществляется последовательно от одного ФУ к другому, а все ФУ выполняют заранее заданную операцию над входным сигналом. Данная структура относительно проста, но функциональные возможности ее ограничены.
В ИИС с радиальной структурой (рис.12.1.а) обмен сигналами между ФУ происходит через центральное устройство управления - контроллер, который задает режим работы ФУ.
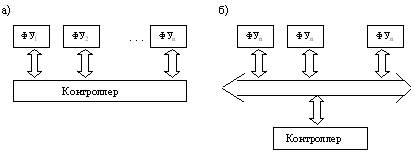
Рисунок 12.1 - Радиальная (а) и магистральная (б) структурные схемы
передачи данных
В этой структуре каждый ФУ подключается к контроллеру посредством индивидуальных шин. Недостатком радиальной структуры является усложнение контроллера при увеличении числа ФУ.
В ИИС с магистральной структурой (рис.12.1.б) существует общая для всех ФУ магистраль, по которой передаются сигналы. Существует также радиально-цепочечные и радиально-магистральные структуры, представляющие собой комбинации этих структур.
Физические величины, измеряемые и контролируемые с помощью ИИС, весьма разнообразны. Для универсальности ИИС измеряемые и контролируемые величины представляют унифицированными электрическими сигналами. Унификация заключается в линеаризации зависимости информативного параметра сигнала от измеряемой величины и в приведении максимального и минимального размера информативного параметра к заданным значениям.
Измерительные системы делят на системы ближнего действия и системы дальнего действия - телеизмерительные системы (ТИС).
ТИС в отличие от систем ближнего действия для передачи информации имеют канал связи. В зависимости от параметра сигнала, несущего измерительную информацию, ТИС подразделяют на токовые, частотные, времяимпульсные и цифровые.
В зависимости от вида и числа элементов, содержащихся в схеме измерения ИС, подразделяют на: многоканальные (с параллельной структурой); сканирующие (с последовательной структурой); мультиплицированные (с общей мерой); многоточечные (с параллельно-последовательной).
12.2 Стандартные интерфейсы для измерительных систем
Стандартный интерфейс – это совокупность унифицированных технических, программных и конструктивных средств, необходимых для взаимодействия различных элементов в системах обработки информации при условии их информационной, электрической и конструктивной совместимости.
Стандартизация интерфейсов проводится в рамках национальных и международных организаций, таких как Международная организация по стандартизации (ISO); Международный консультативный комитет по телефонии и телеграфии (CCITT); Международная электротехническая комиссия (МЭК, IEC); Европейская ассоциация производителей вычислительных машин (ЕСМА); Институт инженеров по электронике и радиоэлектронике (IEEE) США и др.
12.2.1 Стандартный интерфейс МЭК 625.1
Фирмой Hewlett-Packard (Хьюлетт-Пакард) был введен интерфейс под маркой HP-IB (Hewlett-Packard Interface Bus), который использовался для сопряжения приборов (рис.12.2). В дальнейшем он был стандартизован во многих странах мира. В России применение этого стандарта регламентирует ГОСТ 26.003-80, в США - это интерфейс IEEE-488. Данный интерфейс встречается также под названием GRIB (General Purpose Interface Bus) — интерфейсная шина общего пользования (канал общего пользования - КОП).

Рисунок 12.2 – Структурная схема ИИС приборно-модульного типа
Структура ИИС, построенная на основе интерфейса МЭК 625.1, состоит из трех групп модулей: средства измерений (СИ); средства вычислительной техники (СВТ); вспомогательные устройства (ВУ). С шиной КОП соединены следующие агрегатные средства: устройство сопряжения (УС) с объектом измерения (ОИ); коммутатор (К); электронно-счетный частотомер (Ч); осциллограф (ОС); цифровой вольтметр (В); генератор сигналов (Г) и ПЭВМ.
Модули подключаются к магистрали через интерфейсные приставки (интерфейсные модули, интерфейсные карты), обеспечивающие «перевод» информации с языка модулей на язык магистрали и наоборот.
Магистраль интерфейса состоит из 16 информационных линий, сгруппированных в три шины.
Шина синхронизации (ШС) предназначена для согласования работы источника и приемников при обмене информацией, и состоит из трех линий:
- сопровождение данных - СД (DAV);
- готов к приему - ГП (NRED);
- данные приняты - ДП (NDAC).
В процессе синхронизации источник информации, убедившись, что приемник готов к приему (сигнал ГП), передает байт данных, сопровождая его сигналом СД. Приемник в свою очередь вначале выдает сигнал ГП, а затем сигнал ДП.
Шина управления ШУ содержит пять линий:
- «управление» (УП) (ATN) - сигнал формируется контроллером и
является признаком передачи по шине данных интерфейсного сообщения (команды или адреса);
- «конец передачи» (КП) (EOI) - по этой линии передается сигнал
окончания обмена;
- «запрос на обслуживание» (3О) (SRQ) - сигнализирует контроллеру о наличии запроса на обслуживание в системе;
- «очистить интерфейс» (ОИ) (IFC) - сигнал формируется контроллером и обеспечивает приведение интерфейса в исходное положение;
- «дистанционное управление» (ДУ) (REN) - сигнал формируется
контроллером, блокирует ручное управление прибором и устанавливает управление прибором и управление от магистрали.
ШД содержит восемь линий ЛД0......ЛД7, по которым осуществляется прием-передача информации По информационным линиям передаются также интерфейсные сообщения, т.е. адреса модулей и команды. По линиям ЛД0-ЛД4 передается адрес модуля или код команды, а по ЛД5-6 – признак команды.
Максимальное число модулей в интерфейсе без использования дополнительных вспомогательных устройств равно 15.
Передача команд и информации по информационной шине асинхронная и двусторонняя - 1Мбайт/с.
В интерфейсе предусмотрена отрицательная логика и уровни сигналов соответствуют уровням ТТЛ.
ЭВМ выполняет одну из следующих трех функций: считывание результатов измерений с модулей приборов, передача команд на переключение режимов работы модулей, организация обмена между модулями. Основной режим работы этих модулей — постоянное сканирование линий магистрали. Если модуль обнаруживает информацию, предназначенную для него, то он вступает в работу и осуществляет прием или передачу информации.
12.2.2 Стандартный интерфейс КАМАК
Интерфейс КАМАК представляет собой систему функционально-модульного типа. Основным элементом КАМАК является крейт (кассетный блок). Каждый крейт имеет 25 ячеек для вставных функциональных модулей (рис.12.3). Каждый модуль имеет интерфейсный узел сопряжения и соединения с магистралью крейта (горизонтальная связь) через 86-контактный разъем.
КАМАК имеет следующие модули: измерительные; ввода-вывода данных; управления (контроллеры); сопряжения с интерфейсными устройствами; сервисные модули (генераторы, индикаторы) и др.
В каждый момент времени взаимодействуют только два модуля - контроллер и один из его модулей.
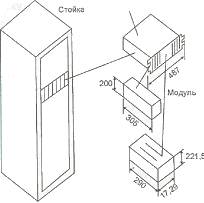
Рисунок 12.3 - Конструкция интерфейса КАМАК
Основной способ ввода данных в систему КАМАК - централизованный по инициативе контроллера.
В КАМАК 6500 предусмотрена многокрейтная система на основе интерфейса параллельного обмена информацией (вертикальная магистраль).
В вертикальной ветви возможно объединять до семи крейтов, в каждом из которых размещается контроллер крейта. Сопряжение системы с ЭВМ при параллельном обмене осуществляется драйвером (устройством управления), включенным в вертикальную магистраль.
Процесс передачи информации в вертикальной магистрали осуществляется по принципу квитирования, т.е. «запрос – ответ».
12.3 Виртуальные приборы и компьютерные измерительные системы
Практическим воплощением концепции виртуального инструмента стала среда разработки программ LabVIEW. Отличие этой среды от других, использующих тесто ориентированные языки, заключается в применении графического программирования. В LabVIEW имеется большая библиотека функций и процедур, универсальных для большинства прикладных задач управления средствами измерения, сбора и обработки данных.
Программы, созданные в среде LabVIEW, имеют три основные составные части: переднюю панель, блок-диаграмму и пиктограмму.
Передняя (лицевая) панель виртуального инструмента (ВИ) содержит графическое изображение шкалы, кнопок, клавиш, регуляторов и других органов управления и индикации (рис.12.4).
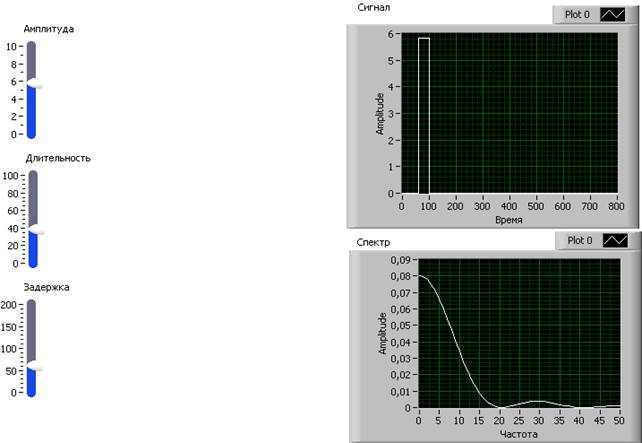
Рисунок 12.4 – Лицевая панель ВП – анализатор спектра
Конструирование лицевой панели в LabVIEW сводится к составлению картинки из различных элементов, находящихся в меню.
Блок-диаграмма представляет собой графическое решение задачи. Она составляется на графическом языке программирования (рис.12.5). Затем встроенный в LabVIEW компилятор транслирует программу в машинный код.
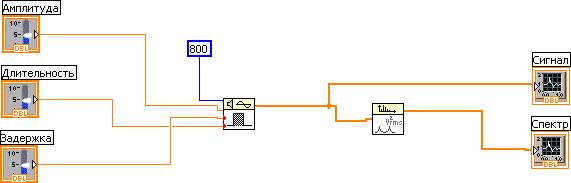
Рисунок 12.5 – Блок-диаграмма анализатора спектра
Функциональными блоками, выбираемыми из меню, могут быть блоки элементарных алгебраических операций, функции сбора и анализа данных, сетевые операции и др.
Пиктограмма является графическим представлением ВИ в блок-диаграмме. Пиктограмма позволяет «свернуть» ВИ в «объект», который можно использовать в блок-диаграммах других ВИ в качестве функций. Аппаратная составляющая виртуальных измерительных приборов, обеспечивающая ввод реальных сигналов измерительной информации, может реализоваться в виде встраиваемых в компьютер сменных плат или в виде внешних устройств.
Сменная встраиваемая плата сбора данных и управления (ПСДУ) содержит обычно следующие основные элементы (рис.12.6): мультиплексор, обеспечивающий параллельный ввод сигналов; устройство выборки и хранения УВХ; аналого-цифровой преобразователь АЦП; цифровой сигнальный микропроцессор МП. Обмен данными между ПСДУ и компьютером происходит либо через механизм прерываний, либо в режиме прямого доступа к памяти.
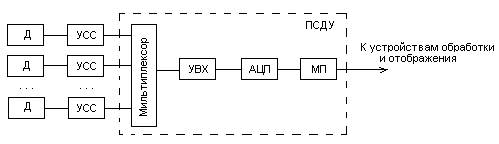
Рисунок 12.6 – Структура встраиваемой платы сбора данных DAQ
Информационный сигнал поступает с датчиков (Д) на ПСДУ через устройства согласования сигналов (УСС), которые могут выполнять различные функции: усиление, питание датчиков, переключение реле, электрическую изоляцию, фильтрацию сигналов и др.
Внешние устройства сбора данных и управления (УСДУ) (рис,12.7) начали разрабатывать и внедрять с появлением переносных портативных компьютеров.
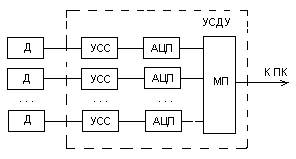
Рисунок 12.7 – Структура внешнего устройства сбора данных
В таких устройствах преобразование сигнала в цифровую форму проводится несколькими полностью синхронизированными АЦП, реализованными обычно в виде единой матрицы логических элементов. Они очень удобны для использования в производстве, например, промышленный компьютер стандарта PXI (рис.12.8).

Рисунок 12.8 – Промышленная модульная система PXI/SCXI
Таким образом, набор аппаратных и программных средств, добавленных к обычному компьютеру и образующие ВИ, можно рассматривать как основу компьютерных измерительных технологий (КИС). Взаимодействие между отдельными элементами системы в КИС осуществляется с использованием внутренней шины персонального компьютера, а стандартные измерительные приборы могут заменяться виртуальными приборами.