
Способы позиционирования.








В технологии поверхностного монтажа компонентов различают четыре способа позиционирования компонентов:
|
Рис. 15.2.1. |
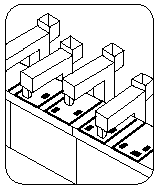
• Конвейерное позиционирование ("поточно-последовательное"). Плата движется по конвейеру вдоль нескольких модулей позиционирования. Каждый модуль осуществляет размещение одного типа корпусов (рис. 15.2.1).
|
Рис. 15.2.2. |
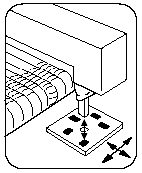
• Последовательное единичное либо групповое позиционирование. Одна или две управляемые от ЭВМ монтажные головки выбирают компоненты из питателей и устанавливают их на плате. В некоторых автоматах подвижная головка перемещается в двух направлениях (X и Y). Более частот применяются автоматы, где под неподвижную головку подводится подвижный стол для позиционирования компонентов (рис. 15.2.2).
|
Рис. 15.2.3. |
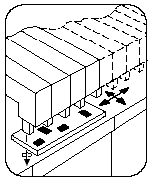
• Последовательно-параллельное позиционирование. Последовательно-параллельное позиционирование называют также синхронно - последовательным, поскольку оно осуществляется в несколько приемов, причем за один прием устанавливается сразу несколько компонентов в корпусах различной сложности. В этом случае автоматы имеют координатный столик, на котором крепится плата и последовательно расположенные монтажные многозахватные головки. Столик по программе может перемещаться по осям X-Y. Каждая головка устанавливает свой тип компонента либо последовательно, либо одновременно (рис. 15.2.3).
|
Рис. 15.2.4. |
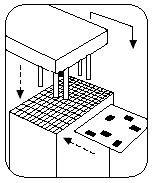
• Массовое или поточно-параллельное позиционирование. Многозахватные головки за один прием устанавливают на плату большой набор компонентов. За одну операцию ими заселяется часть или вся плата (рис. 15.2.4).
Метод массового размещения более всего применим к очень высоким объемам выпускаемой продукции с низкой степенью смешанности компонентов для различных типов монтажа. Автоматы-укладчики, использующие метод последовательного группового размещения, могут обеспечить высокий уровень гибкости производства, но с более низкой скоростью позиционирования. Они применяются в случае низкого или среднего объема производства изделий с высокой степенью смешанности монтажа. Последовательно - параллельные автоматы наилучшим образом приспособлены для средних и высоких объемов работ при низкой степени смешанности монтажа. В некоторых автоматах предусмотрена возможность смены монтажных головок и захватов. Это увеличивает гибкость производственных линий, хотя и снижает производительность.