
Инавриантное воздействие








Идеальной в смысле точности воспроизвередния была бы система, которая в точности возпроизводила бы управляющее воздействие. Независимость системы под сигналом, называется инвариантностью. Если система инвариантна по отношению к любому сигналу, к любому воздействию,не зависимо от его характера, то имеет место полная инвариантность. Для получения полной инвариантности необходимо, чтобы ее ошибка была тождественно равна нулю. Это требование приводит к тому, что сама ПФ тожественно равна нулю. W(S) ≡ 0. Однако, это условие необходимо и неосуществимо. Но при увеличении коэффициента передачи нарушается условие устойчивости поэтому можно только говорить о приближенной инвариантности.
При частичной инвариантности равна нулю лишь вынужденная составляющая ошибки и только при воздействии определенного вида.
Применением частичной инвариантности может служить случай, когда в системе, обладающей остатизмом ν-го порядка, приближенно воздействует ???? производных выше (ν-1) порядка. При этом часть инвариантности к постоянному во времени воздействию с учетом статистической ошибки осуществляется за счет обеспечения остатизма, а именно за счет воздействия на систему интегри????. При этом для комплексного возмущающего воздействия интегри???
Способы получения астатизма
Остатизм можно получить с помощью включения в прямую цепь изодропного звена.  - постоянная времени изодропности.
- постоянная времени изодропности.
Усли Tи достаточно велико, то запас устойчивости может быть сохранен неизменно.
Остатизм САР относительно задающего воздействия можно обеспечить более простыми способами:
1) Неединичная обратная связь
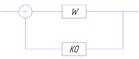
 - передаточных коэффициент прямой устойчивой системы. Система будет остатична относительно выдающего воздействия.
- передаточных коэффициент прямой устойчивой системы. Система будет остатична относительно выдающего воздействия.
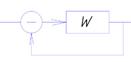
2) Масштабирование


Система остатична относительно задающего воздействия.
Повышение точности сар путем применения комбенированного уравнения
Точность САР повышается путем компенсации влияния сигналов управления и возмущения за счет применения комбинированного уравнения. В результате этого увеличивается порядок остатизма.

W1 – передаточная функция усилительного звена;
W2 – ПФ объекта регулирования
Составим ПФ этой системы регулирования относительно ошибки

Отсюда видно, что если взять  , мы получим ошибку, равную нулю. Т.о. нам удастся создать систему полностью инвариантную управляющему сигналу, т.е. получим ошибку, независимую то управляющего сигнала. Однако на практике трудно это обеспечить, поэтому выбирают другую компенсирующую ПФ, которая только повышает порядок остнатизма.
, мы получим ошибку, равную нулю. Т.о. нам удастся создать систему полностью инвариантную управляющему сигналу, т.е. получим ошибку, независимую то управляющего сигнала. Однако на практике трудно это обеспечить, поэтому выбирают другую компенсирующую ПФ, которая только повышает порядок остнатизма.

 g(t) = 0;
g(t) = 0;
Когда  , система будет полностью инвариантна. Цепь не влияет на устойчивость замкнутого контура, однако она сама должна быть устойчивой. Такое комбинированное регулирование используется в системах для уменьшения влияния сильного возмущения и влияния управления.
, система будет полностью инвариантна. Цепь не влияет на устойчивость замкнутого контура, однако она сама должна быть устойчивой. Такое комбинированное регулирование используется в системах для уменьшения влияния сильного возмущения и влияния управления.
Анализ качества САР
Правильно спроектированная САР должна отвечать указанной точности и плавности протекания процесса, под влиянием управляющего или возмущающего воздействия.
Пусть эта система находится в состоянии переходного процесса. На вход подаем единичное возмущение (g(t) = 1(t)); управляющий сигнал на выходе  , где xсв(t) – свободная составляющая переходного процесса, которая обуславливается свойствами системы и соответствующему общему решению другой системы. Хвын(t) – вынужденная составляющая переходного процесса, обусловленная законом изменения входного воздействия g(t).
, где xсв(t) – свободная составляющая переходного процесса, которая обуславливается свойствами системы и соответствующему общему решению другой системы. Хвын(t) – вынужденная составляющая переходного процесса, обусловленная законом изменения входного воздействия g(t).
Известно, что Хвын(t) определяет точность САР, а xсв(t) влияет на показатели переходного процесса
Рассмотрим сам переходный процесс (см. рисунок а Лабе№1)
Показатели качества процесса регулирования:
1) Перерегулирование – это отношение разности σ = (Xmax – Xуст)/ Xусn*100% перерегулирование характеризует колебания системы. Допустимый предел (25…30)%
2) Время регулирования характеризует быстроту уравновешивания системы. tрег принимаем за момент окончания переходного процесса.(допускается отклонение ±5%)
3) Число колебаний регулируемой величины в течении времени переходного процесса. tрегулир характеризует колебания системы. (допускается не более 3-х полных колебаний)
Дополнительные показатели качества:
1) Собственная частота колебаний системы  , где Тк – период собственных колебаний системы.
, где Тк – период собственных колебаний системы.
2) Логарифмический декремент затухания  Характеризует быстродействие системы, т.е., быстроту затухания колебательного процесса.
Характеризует быстродействие системы, т.е., быстроту затухания колебательного процесса.
3) Максимальная скорость сигнала на входе  . Данный показатель характеризует быстродействие системы.
. Данный показатель характеризует быстродействие системы.
Для замкнутой САР, имеющий колебательный переходный процесс, на основе указанных показателей качества можно установить область допустимых отклонений регулируемой величины.
Корд. формула ошибки по возмущению

Передаточная функция замкнутой системы для ошибки по возмущению характеризует ошибки воспроизведения, вызванные возмущающим воздействием. Остатизм системы:  .
.
Это равенство определяет ошибки в установлении ?равновесия? и функция должна быть равна нулю для статической системы, и отличен от нуля для остатической системы. Рассмотрим установливающиеся режимы для постоянных или
Синтез САР
Сущность задачи синтеза законов состоит в следующем:
Такой выбор структурной схемы САР, а также ее параметров, ее конструктивное решение, при которой обеспечивается требуемые показатели качества и точности процесса регулирования, а сама САР состоит из наиболее простых устройств управления.
Вс. САР можно разделить на:
- объект регулирования (исполнительное устройство, усилитель мощности и измерительные устройства) Все это неизменная часть САР
- корректирующие устройства и усилители – это изменяемая часть
В значительной степени определяющей при выборе устройств неизменяемой части является стоимость, надежность, масса и габаритные размеры.
Порядок синтеза:
· составляется упрощенная структурная схема , выбирается место и схема, включающая корректор и усилители устройств
· по критерию качества или требованию показателей качества и точности регулирования подбирают желаемую логарифмическую частотную характеристику разомкнутой САР
· Определяют тип и параметры корректирующих устройств САР и составляют окончательную схему САР
· Определяют динамические характеристики системы и сравнивают их с соответствующими данными технических условий
· Приведенный порядок синтеза может привести к неоднозначности решения задачи.
Дискретные сар типы и основные элемены импульсов сар
В дискретных системах контур управления замыкается только на определенных промежутках времени. В эти промежутки осуществляется воздействие на САР. В паузах между импульсами цепь управления размыкается. Поведение импульсного элемента в дискретные моменты времени описываются линейными уравнениями.
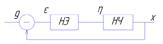
Регулируемая величина и ошибка регулирования.
На вход импульсного элемента подается непрерывный сигнал – ε. Импульсный элемент преобразует непрерывный сигнал ε в последовательность импульсов. Процесс преобразования непрерывного сигнала в дискретный осуществляется импульсным элементов и назвается квантованием.
По способу квантования все дискретные системы делятся:
1) по величине квантования их импульсными системами - выделение значения импульсов в различные моменты времени
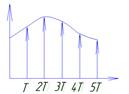
2) по уровню квантования – если импульс повторяется через период Т, то это назвается широко-импульсной модуляцией. (частный случай)

3) по времени и уровню квантования (цифровые).
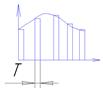
Каждый импульс можно характеризовать порядковым номером, временем возникновения импульса Δtн, временем конца импульса Δtк, длительностью импульса Δt