
Синусный и синусно - косинусный вращающиеся трансформаторы








Для того чтобы разобраться в происходящих физических процессах, рассмотрим сначала простейший (синусный) вращающийся трансформатор. Для упрощения анализа здесь и далее будем считать, что трансформатор совершенно ненасыщен (что, как правило, и бывает на практике), и оперировать не МДС, а магнитными потоками Ф обмоток.
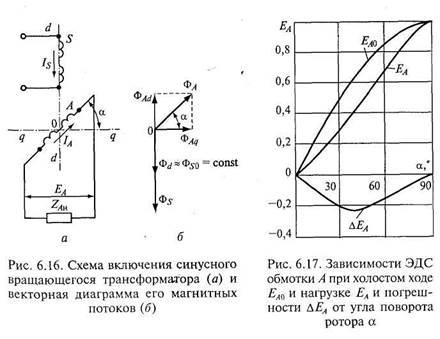
Синусный вращающийся трансформатор (СВТ) может работать при наличии всего двух обмоток: обмотки статора S , подключенной к сети переменного тока (назовем ее обмоткой возбуждения), и обмотки ротора А, являющиеся вторичной (выходной) обмоткой (рис. 6.16, а).
При холостом ходе, когда ZAH = ∞ и Iн = 0, вследствие того что взаимоиндуктивность между обмотками статора и ротора изменяется по синусоидальному закону в зависимости от угла поворота ротора α, ЭДС выходной обмотки, наводимая потоком первичной обмотки ФS, будет синусоидальной функцией угла α:

где ЕАтах — максимальная ЭДС обмотки А, наводимая в случае совпадения осей обмоток А и S (α = 90°).
Максимальную ЭДС можно выразить через ЭДС Es , наводимую потоком Ф s в первичной обмотке статора S , и отношение эффективных чисел витков (w А и ws ) обмоток А и S , как и в обычном трансформаторе:

где k тах = wA / ws = kwAwA ’/( kwSws ') — максимальный коэффициент трансформации; wA ', kwA , ws ', kwS — истинные числа витков и обмоточные коэффициенты соответствующих обмоток.
С учетом формулы (6.9) выражение (6.8) для ЭДС выходной обмотки при холостом ходе имеет вид

или, если не учитывать падение напряжения на собственном сопротивлении обмотки возбуждения S ,

где k (α) = kmaxsinα = ( wA / ws ) sinα — коэффициент трансформации вращающегося трансформатора, который в отличие от коэффициента трансформации обычного трансформатора является функцией угла поворота ротора α.
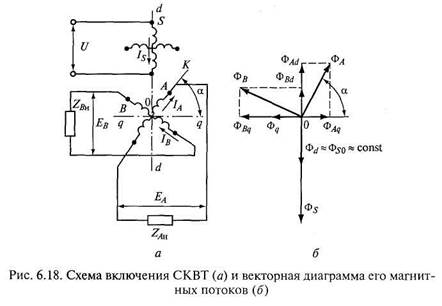
На рис. 6.17 представлены ЭДС обмотки А при холостом ходе ЕА0, при нагрузке ЕА и погрешность ΔЕА, вносимая поперечным потоком ФА q , как функции угла поворота ротора. Погрешность ΔЕА зависит от значения комплексного коэффициента а. В реальных вращающихся трансформаторах он невелик, поэтому погрешность ΔЕА у них значительно меньше, чем на рис. 6.17, где коэффициент а принят равным единице.
На практике чаще применяются не синусные, а синусно-косинусные вращающиеся трансформаторы.
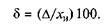
Синусно-косинусные вращающиеся трансформаторы (СКВТ) имеют не две, а четыре обмотки (рис. 6.18, а). Две обмотки S и K располагаются на статоре. Они сдвинуты в пространстве на 90° и имеют обычно одинаковое число витков, обладая одинаковыми собственными сопротивлениями ( ws = wK ; Zs = ZK ). Две другие обмотки А и В располагаются на роторе. Они также сдвинуты на 90° между собой и имеют одинаковые параметры ( wA = wB ; ZA = ZB ).
Так как обмотка В сдвинута на 90° относительно обмотки А, то в том случае, когда ЭДС второй обмотки изменяется по закону синуса в зависимости от угла поворота ротора а, ЭДС первой обмотки изменяется по закону косинуса.
Анализируя диаграмму магнитных потоков синусно-коси-нусного вращающегося трансформатора, представленную на рис. 6.18, б, нетрудно заметить, что поперечные потоки ФАд и ФВд обмоток А и В ротора направлены на встречу друг другу. Это значит, что при наличии двух вторичных обмоток А и В суммарный поперечный поток при нагрузке Фд = ФАд + ФВд всегда меньше, чем при наличии одной обмотки. Меньшее значение потока по поперечной оси приводит к меньшей погрешности вращающегося трансформатора.
Глава 7
МЕТРОЛОГИЧЕСКИЕ ПОКАЗАТЕЛИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
7.1. Погрешности измерений
Результат любого измерения отличается от истинного значения измеряемой величины на некоторое значение, зависящее от точности средств и метода измерения, квалификации оператора, условий, при которых производится измерение. Отклонение результата измерения от истинного значения измеряемой величины называется погрешностью измерения. Различают абсолютные погрешности измерения, которые выражаются в единицах измеряемой величины, и относительные погрешности измерения, определяемые как отношение абсолютной погрешности измерения к истинному значению измеряемой величины:

где Δ — абсолютная погрешность измерения; x — значение, полученное при измерении; x и — истинное значение измеряемой величины; δ — относительная погрешность измерения.
Относительная погрешность, выраженная в процентах истинного значения измеряемой величины, рассчитывается по формуле
В зависимости от характера проявления погрешности делят на систематические, случайные и грубые (промахи).
Погрешность Δ является результирующей погрешностью, т.е. суммой систематической Δс и случайной Δ° погрешностей.
Систематической погрешностью измерения называется составляющая погрешности измерения, остающаяся постоянной или закономерно изменяющаяся при повторных измерениях одной и той же величины. Причинами появления систематических погрешностей могут быть неисправности измерительной аппаратуры, несовершенство метода измерений, неправильная установка измерительных приборов и отступление от нормальных условий их работы, индивидуальные особенности оператора. Систематические погрешности в принципе могут быть выявлены и устранены. Для этого требуется проведение тщательного анализа возможных источников погрешностей в каждом конкретном случае.
Случайной погрешностью измерения называется составляющая погрешности измерения, изменяющаяся случайным образом при повторных измерениях одной и той же величины. Наличие случайных погрешностей выявляется при проведении ряда измерений этой величины, когда оказывается, что результаты измерений не совпадают друг с другом. Часто случайные погрешности возникают из-за одновременного действия многих независимых причин, каждая из которых в отдельности мало влияет на результат измерения.
В некоторых случаях оказывается, что результат того или иного отдельного измерения резко отличается от результатов других измерений, выполненных при тех же контролируемых условиях. Причиной этого может быть ошибка оператора, возникновение сильной кратковременной помехи, толчок, нарушение электрического контакта и т.д. Естественно, что такой результат, содержащий грубую погрешность (промах), следует выявить, исключить и не учитывать при дальнейшей статистической обработке результатов измерения.