
Работа сельсинов в индикаторном режиме








Простейшая индикаторная система синхронной связи для дистанционной передачи угла состоит из двух одинаковых сельсинов (приемника и датчика) и линии связи (рис. 6.13). Обмотки возбуждения (ОВ) обоих сельсинов подключаются к однофазной сети переменного тока. Концы фаз А, В, С обмотки синхронизации приемника соединяются линией связи с концами фаз обмотки синхронизации датчика.
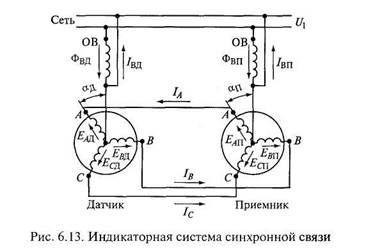
Переменные токи Iвд и Iвп обмоток возбуждения сельсинов создают магнитные потоки Фвд и Фвп, которые индуцируют в обмотках синхронизации сельсинов электродвижущие силы: ЕАД, ЕВД, ЕСД, ЕАП, ЕВП и ЕСП. Значение ЭДС обмотки той или иной фазы зависит от ее пространственного расположения относительно обмотки возбуждения. Если фазы обмоток синхронизации датчика и приемника расположены одинаково относительно соответствующих обмоток возбуждения (αд = αп), то в соединенных между собой линией связи обмотках синхронизации приемника и датчика индуцируются одинаковые и встречно направленные ЭДС. Эти ЭДС уравновешивают друг друга, и в цепи обмоток синхронизации ток отсутствует. Такое положение роторов сельсинов называется согласованным.
Если ротор датчика поворотом на некоторый угол вывести из согласованного положения, то равновесие ЭДС, индуцированных в одноименных обмотках синхронизации, нарушится. За счет этого в обмотках синхронизации и линии связи появятся токи I А , I В и I С . В результате взаимодействия этих токов с магнитными потоками обмоток возбуждения возникнут вращающие моменты как в сельсине-датчике, так и в сельсине-приемнике, которые будут стремиться привести роторы сельсинов в согласованное положение. Вращающие моменты, действующие на роторы приемника и датчика, будут равны по значению и противоположны по направлению.
Так как ротор сельсина-датчика после поворота обычно фиксируется (затормаживается), то поворачиваться (до согласованного положения) будет ротор сельсина-приемника. Значение синхронизирующего момента, развиваемого сельсином-приемником, зависит от угла рассогласования и параметров сельсинов системы.
Точность работы сельсинов в индикаторном режиме. Основным требованием, которое предъявляется к сельсинам, работающим в схемах синхронной связи, является точность отработки сельсином-приемником заданного сельсином-датчиком угла. Точность работы сельсинов в схеме синхронной связи зависит как от качества работы (точности) сельсинов-приемников, так и от качества работы (точности) сельсинов-датчиков.
Точность работы сельсина-приемника в индикаторном режиме характеризуется погрешностью Δθ, которая определяется как полусумма максимального положительного θmax1 и максимального отрицательного θmax2 отклонений ротора приемника от согласованного с ротором датчика положения за один оборот:
Погрешность в статическом режиме определяется путем поворота ротора датчика сначала по часовой стрелке на 360°. Измерение погрешности производится либо непрерывно (с помощью приборов), либо через 1 или 10° в зависимости от требуемой точности.
По значению погрешности Δθ в статическом режиме при работе по схеме «один на один» различают индикаторные сельсины-приемники четырех классов точности: 1-й класс — Δθ не более ±30'; 2-й класс — Δθ не более ±45'; 3-й класс — Δθ не более ±60'; 4-й класс — Δθ не более ±90'.
Точность работы сельсинов-приемников в индикаторном режиме определяет ряд факторов:
удельный синхронизирующий момент МУД — момент, приходящийся на 1º угла рассогласования;
момент сопротивления на валу приемника Мс (обычно момент трения самого приемника Мс = М T );
добротность сельсина — отношение удельного синхронизирующего момента к моменту трения (Д = МУД/М T );
магнитная и электрическая несимметрия;
дисбаланс ротора;
время успокоения — время, в течение которого успокаивается (останавливается) ротор приемника после рассогласования на ±179°;
точность сельсинов-датчиков, режим работы и др.
Работа сельсинов в трансформаторном режиме
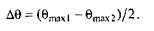
Простейшая трансформаторная система синхронной связи (рис. 6.14) состоит из двух сельсинов — приемника и датчика, соединенных линией связи, усилителя (У) и исполнительного двигателя (ИД), вал которого механически соединен с валом ротора сельсина-приемника (обратная механическая связь).
Однофазная обмотка сельсина-датчика ОВД подключается к сети переменного тока. Ток этой обмотки создает пульсирующий магнитный поток Фвд, который, сцепляясь с обмоткой синхронизации, наводит в ее фазах следующие ЭДС:

где Еф max — максимальная ЭДС, наводимая магнитным потоком в однофазной обмотке возбуждения датчика.
Значения этих ЭДС зависят от расположения фаз обмотки синхронизации относительно обмотки возбуждения.
Под действием ЭДС ЕАД, ЕВД, ЕСД (EфД) в соединенных между собой одноименных фазах обмоток синхронизации датчика и приемника, а также в линии связи возникают токи I А , I В , I С (Iф), которые определяются значениями соответствующих ЭДС, а также полными сопротивлениями фаз датчика zфД, приемника zфП и линии связи z л :

Считая, что фазы обмоток синхронизации датчика и приемника имеют одинаковые сопротивления и включают в себя каждая по половине сопротивления линии, т.е. zФД + zл/2 = z фП + z л/2 = zФ, получим

Подставив в выражение (6.7) значения ЭДС соответствующих фаз из формулы (6.6), можно найти токи I А , I В , I С . Эти токи, протекая по фазам обмотки синхронизации приемника, создают пульсирующие магнитные потоки ФАП, ФВП, ФСП пропорциональные магнитодвижущим силам фаз F АП , Е ВП , Е СП и направленные по их осям.
В двухполюсном сельсине магнитодвижущая сила (МДС) фазы (амплитуда ее первой гармоники) может быть найдена по формуле

где w — число витков в обмотке фазы; kw — коэффициент, зависящий от конструкции обмотки.
МДС фаз легко определить, подставив в последнее равенство токи I А , I В , I С из формулы (6.7) с учетом формулы (6.6).
Потоки фаз приемника ФАП, ФВП, ФСП складываясь, образуют результирующий магнитный поток ФП обмотки синхронизации приемника, направленный под некоторым (зависящим от угла рассогласования) углом к выходной однофазной обмотке приемника (ВОП).
Поток Фп, пульсируя с частотой сети, наводит в выходной однофазной обмотке приемника ЭДС, являющееся выходным напряжением приемника Uвых.
Согласованным положением сельсинов в трансформаторной системе синхронной связи называется такое положение роторов, при котором выходное напряжение приемника U вых равно нулю. В отличие от согласованного положения сельсинов в индикаторной системе в этом случае поворот ротора сельсина-приемника составляет 90°. Вследствие этого за начало отсчета углов в сельсине-приемнике принимается точка на оси, перпендикулярной оси однофазной выходной обмотки (см. рис. 6.14).
Сельсин-приемник в трансформаторной системе синхронной связи самостоятельно не отрабатывает заданный датчиком угол αд, а лишь вырабатывает ЭДС выходной обмотки, изменяющуюся по закону синуса в зависимости от угла рассогласования θ. Отработка заданного датчиком угла — поворот ротора сельсина-приемника на угол αп = αд — осуществляется с помощью исполнительного двигателя.
Принцип действия трансформаторной системы синхронной связи (см. рис. 6.14) состоит в следующем. При выводе ротора сельсина-датчика из согласованного положения (повороте на некоторый угол αд = θ) на выходной обмотке сельсина-приемника появляется напряжение Uвых. Это напряжение подается на вход усилителя, а затем на обмотку управления исполнительного двигателя.
Ротор двигателя начинает вращаться, поворачивая при этом ротор сельсина-приемника, с которым он механически связан. Вместе с ротором приемника поворачивается в пространстве и его магнитный поток Фп; при этом изменяются потокосцепление с выходной обмоткой и ее ЭДС (выходное напряжение Uвых). Роторы двигателя и сельсина-приемника поворачиваются до тех пор, пока ротор сельсина-приемника не повернется на заданный датчиком угол αп = αд и сельсины не займут согласованное положение, в котором поток Фп перпендикулярен оси выходной обмотки ВОП и выходное напряжение сельсина-приемника U вых , а следовательно, и напряжение на усилителе и обмотке управления исполнительного двигателя, равны нулю.
В отличие от индикаторной системы синхронной связи по проводам линии связи трансформаторной системы всегда, даже в согласованном положении, протекают токи. Сельсины-приемники в трансформаторной системе питаются не от сети (как это имеет место в индикаторной системе), а от обмотки синхронизации датчика.
6.4. Вращающиеся трансформаторы
Вращающиеся трансформаторы — это небольшие индукционные электрические машины, предназначенные для преобразования механического перемещения (угла поворота ротора α) в электрический сигнал — выходное напряжение U , амплитуда которого находится в определенной функциональной зависимости от угла поворота ротора.
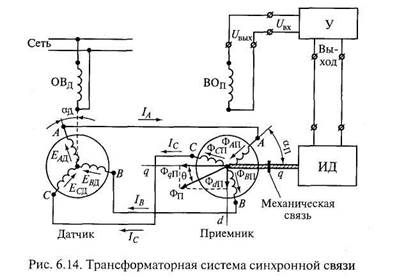
Конструктивно вращающиеся трансформаторы весьма разнообразны, однако в настоящее время наибольшее распространение получили двухполюсные вращающиеся трансформаторы, изготовляемые аналогично двухфазным асинхронным двигателям с контактными кольцами. Пакеты статора и ротора таких вращающихся трансформаторов (ВТ) изготовляют из тщательно изолированных друг от друга листов электротехнической стали, полученных на штампах высокой точности. В полузакрытых пазах статора и ротора располагаются двухфазные обмотки, оси которых сдвинуты на 90° относительно друг друга (рис. 6.15). Обычно обе обмотки S и K статора имеют одинаковое число витков (Ws = WK ) и одинаковые активные R и реактивные сопротивления X . Обмотки ротора А и В также выполняются одинаковыми ( wA = wB ; RA = RB ; ХА = Хв).
У большинства вращающихся трансформаторов концы обмоток ротора выводятся к контактным кольцам, по которым скользят щетки. Кольца и щетки обычно изготовляются из сплавов серебра. В некоторых вращающихся трансформаторах, предназначенных для работы с ограниченным углом поворота ротора, кольца и щетки заменяются гибкими спиральными пружинами из латуни (наподобие токосъемов измерительных приборов).
Особенностью вращающихся трансформаторов является то, что у них взаимоиндуктивность между первичными (статора) и вторичными (ротора) обмотками при повороте ротора на угол а изменяется строго по синусоидальному (или косинусоидальному) закону в зависимости от угла а, что при определенных условиях обеспечивает такой же закон изменения амплитуды ЭДС вторичных обмоток.
В зависимости от того, какой функцией угла поворота ротора является выходное напряжение U , различают следующие вращающиеся трансформаторы:
синусные (СВТ) — U = Umaxsinα, где Umax — максимальное выходное напряжение.
синусно-косинусные (СКВТ) — UA = Umaxsinα; UB = Umaxcosα;
линейные (ЛВТ) — U = kα, где k = const.
Четырехобмоточные вращающиеся трансформаторы, имеющие по две обмотки на статор и ротор, в автоматике и вычислительной технике при определенных схемах соединения обмоток используются в виде:
построителей, позволяющих производить преобразование координат, определять (строить) вектор по его составляющим;
приборов для согласования (масштабирования) напряжений отдельных каскадов — масштабных ВТ (МВТ);
трансформаторных сельсинов в системах синхронной связи;
фазовращателей.
Один и тот же вращающийся трансформатор практически может выполнять различные функции. Его выходные характеристики зависят от схем соединения и питания обмоток.