
Наряду с линейными преобразователями в системах автоматики и управления широко применяют функциональные преобразователи.








Для получения функциональных реостатных преобразователей используют следующие способы: изменение диаметра провода вдоль намотки; изменение шага намотки; применение каркаса определенной конфигурации; шунтирование участков линейного потенциометра сопротивлениями различных значений. Первые два способа сопряжены с технологическими трудностями и на практике не применяются.
К достоинствам проволочных реостатных преобразователей можно отнести: простоту конструкции; малые размеры и массу; возможность получения необходимых функциональных зависимостей относительно простыми средствами; получение высокоточных линейных статических характеристик; стабильность характеристик; малое переходное сопротивление; возможность работы на переменном и постоянном токе; малый ТКС.
Недостатками этих элементов следует считать: наличие скользящего контакта, который может стать причиной отказа из-за окисления контактной дорожки, перетирания витков или отгибания движка; сравнительно небольшой коэффициент преобразования и высокий порог чувствительности; наличие шума; подверженность электроэррозии под действием импульсных разрядов; ограниченную скорость линейного перемещения или вращения (до 100...200 об/мин) токосъемника вследствие его вибраций при переходе с витка на виток и повышение при этом уровня динамического шума; ограниченную частоту переменного тока (до 1000 Гц); низкую износоустойчивость.
5.4. Тензометрические датчики
В основе работы тензометрических датчиков (тензорезисторов) лежит тензоэффект; заключающийся в изменении активного сопротивления проводниковых и полупроводниковых материалов при их механической деформации.
Характеристикой тензоэффекта материала служит коэффициент тензочувствительности КТ, определяемый как отношение изменения сопротивления к изменению длины проводника:

где δR = ΔR / R ; δl = Δl/l; ΔR — приращение сопротивления при изменении длины l на Δl; Е — модуль упругости материала; σ — механическое напряжение.
Коэффициент тензочувствительности связан с деформацией материала и его удельным сопротивлением выражением
где μ — коэффициент Пуассона; δρ — относительное приращение удельного сопротивления р материала при деформации.
Коэффициент тензочувствительности металлов, наиболее часто применяемых для тензорезисторов, близок к двум: для константана — 2; для нихрома — 2,2; для хромеля — 2,5. Для полупроводниковых материалов KT = δρ/(δl), и он намного больше, чем у металлов. Например, для германия KT ≈ 100. Однако полупроводниковые материалы характеризуются малыми механической прочностью и стабильностью по сравнению с металлами.
Тензорезисторы используют для измерения давления жидкости и газа, а также при измерении упругих деформаций материалов: давлений, изгибов, скручивания и т.д.
В качестве тензорезистивного материала можно использовать сплавы с малым ТКС (манганин, константан, нихром, никелин), платиносеребрянные и платиновольфрамовые полупроводниковые материалы (германий, кремний). Наиболее распространены тензорезисторы, выполненные из металла. Они разделяются на проволочные и фольговые.
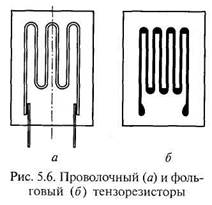
Проволочные тензорезисторы выполняют из проволоки диаметром 0,002...0,05 мм, которую укладывают частыми петлями на тонкую бумагу или лаковую пленку и приклеивают к ней (рис. 5.6, а). К концам проволоки припаивают или приваривают медные выводы. Сверху преобразователь покрывают лаком. Материал для пленки выбирают в зависимости от условий эксплуатации. Резисторы на пленке из клея БФ-2 работают в диапазоне температур от -40 до 70 °С, а на бакелитовом лаке — до 200 °С. Для более высоких температур используют специальные высокотемпературные клеи или цементы.
Тензорезистор наклеивают на поверхность испытуемой детали таким образом, чтобы его продольная ось была расположена в направлении измеряемой деформации, т.е. чтобы возможные деформации детали происходили вдоль петель резистора. Это позволяет точнее измерять линейные деформации.
Наиболее часто используют преобразователи с базой (длиной петель) 5...20 мм, обладающие сопротивлением 30...500 Ом. Их номинальный рабочий ток, определяемый условиями отвода выделяемых в них потерь энергии, находится в пределах десятков миллиампер. Максимально допустимые относительные деформации не превышают 0,3 %.
Поскольку изменение сопротивления тензорезисторов, вызванное деформацией, весьма мало и колеблется от единиц миллиом до нескольких десятых долей ома, то для измерений применяют высокочувствительные потенциометрические и мостовые схемы. Чтобы повысить чувствительность тензорезисторов, их можно включать в два и даже четыре плеча мостовой схемы.
Характеристика проволочных тензорезисторов в пределах упругой деформации близка к линейной и определяется выражением

где S — площадь сечения проволоки.
Отклонение от линейности характеристики не превышает 0,1 %. Чувствительность проволочного тензорезистора

Фольговые преобразователи (рис. 5.6, б) более совершенны, чем проволочные тензорезисторы. Они имеют решетку из тонких полосок фольги прямоугольного сечения толщиной 4... 12 мкм, полученную травлением и нанесенную на лаковую подложку. Благодаря большей площади контакта полосок фольгового тензорезистора с объектом измерения его теплоотдача значительно выше, чем у проволочного, что позволяет увеличить ток, протекающий через резистор, до 0,5 А, и тем самым повысить чувствительность тензопреоб-разователя. Другое достоинство фольговых тензорезисторов заключается в возможности изготовления решеток сложного профиля, которые наиболее полно удовлетворяют условиям измерений.
Полупроводниковые тензорезисторы имеют ряд существенных преимуществ: их чувствительность в 50...60 раз превышает чувствительность проволочных, размеры существенно меньше, уровень выходного сигнала в ряде случаев достаточен для использования без сложных и дорогих усилителей. Основным их отличием от проволочных является большое (до 50 %) изменение сопротивления тензопреобразователя при деформации.
К недостаткам полупроводниковых тензорезисторов следует отнести малые механическую прочность и гибкость. Реализовать большую тензочувствительность этих тензорезисторов оказывается довольно сложно из-за нелинейности характеристики, высокой чувствительности к воздействию внешних условий и существенного разброса параметров от образца к образцу.
Погрешности тензорезисторов могут быть вызваны изменениями температуры, недостаточными сопротивлением изоляции и влагостойкостью, качеством наклеивания, наличием поперечной деформации (для наклеиваемых преобразователей). Особенно большие погрешности могут внести изменения температуры и не только из-за ухода параметров материала, но и из-за появления добавочных механических напряжений, вызванных разностью температурных расширений материалов тензорезистора и детали. Тем не менее, применяя дополнительные меры (дополнительную установку нуля перед каждым измерением, калибрование и т.д.), погрешность измерений можно довести до 0,2...0,5 % при статических и до 1... 1,5 % при динамических измерениях.
К достоинствам тензорезисторов можно отнести незначительную массу, малые размеры, простоту конструкции, возможность измерения статических и динамических процессов; к недостаткам — относительно невысокую чувствительность, возможность только разового использования (так как он разрушается при отсоединении от детали), необходимость использования мостовой измерительной схемы и компенсации температурных воздействий.
5.5. Индуктивные датчики
Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления Rm магнитной цепи датчика, в которую входит сердечник.
Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей, что, в свою очередь, вызывает изменение выходной величины — электрического тока I или напряжения U .
С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов, определять наличие дефектов, контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали и др.
Индуктивные датчики отличает ряд достоинств: простота и прочность конструкции, надежность в работе, отсутствие скользящих контактов, большая величина мощности на выходе (до нескольких десятков ватт), высокая чувствительность (до 100 В/мм).
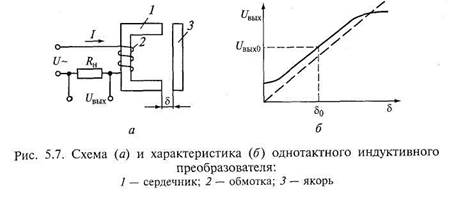
Рассмотрим работу однотактного индуктивного преобразователя (рис. 5.7, а). Выходной сигнал получают в виде переменного напряжения, снимаемого с сопротивления нагрузки RH , включенного в цепь обмотки 2, помещенной на сердечнике 1. Питание осуществляется переменным напряжением U c частотой от 50 до нескольких тысяч герц. Под действием входного сигнала перемещается якорь 3 и изменяется зазор 5. Выходное напряжение датчика

Среднее значение тока в рабочей цепи преобразователя

где R — суммарное активное сопротивление цепи, R = RH + R 0 ; R 0 — сопротивление обмотки — реактивное сопротивление цепи; ω — круговая частота.
Индуктивность обмотки L является функцией размера зазора с магнитным сопротивлением rδ:

где w — число витков обмотки; μ0 — магнитная проницаемость воздуха в зазоре; S — площадь поперечного сечения зазора.
Учитывая, что на практике для индуктивных преобразователей выполняется условие R << XL и подставляя выражение (5.6) в (5.5), получаем

Коэффициент преобразования K = URH /( wμ0Sw2) — величина постоянная, поэтому статическая характеристика UBblx = f(δ) должна представлять собой прямую, проходящую через начало координат под углом α = arctgK к оси абсцисс (рис. 5.7, б, штриховая линия). Реальная характеристика преобразователя, показанная на рисунке сплошной линией, отличается от идеальной. Это объясняется тем, что при малых значениях δ допущение rm << rδ становится неверным, так как магнитное сопротивление ферромагнитного участка магнитной цепи r т становится соизмеримым с магнитным сопротивлением зазора rδ; при больших значениях 5 падает индуктивность обмотки L и реактивное сопротивление XL становится соизмеримым с активным сопротивлением магнитной цепи, т.е. R ≈ XL . Это несоблюдение принятых в начале рассмотрения допущений и приводит к искажению статической характеристики.
Анализ принципа действия и статической характеристики однотактного измерительного индуктивного преобразователя позволяет выявить следующие его недостатки: фаза выходного сигнала не зависит от направления перемещения якоря; для измерения перемещения в обоих направлениях необходим начальный зазор δ0, что приводит к наличию остаточного (начального значения) напряжения U вых0 (см. рис. 5.7, б); на якорь постоянно действует электромагнитная сила, стремящаяся притянуть его к ярму. При большой мощности сигнала выходной цепи она может принимать существенные значения, что требует введения компенсирующих сил, создаваемых противодействующими пружинами, а это значительно усложняет устройство.
Непосредственно для измерительных целей применяют двухтактные измерительные преобразователи, которые могут включаться по дифференциальной или мостовой схемам.
Дифференциальная схема включения индуктивного измерительного преобразователя требует использования трансформатора со средней точкой (рис. 5.8). Оба сердечника идентичны по своим конструктивным и магнитным характеристикам. Расположенные на них обмотки w 1 и w 2 имеют также одинаковые параметры и включены последовательно-встречно. Сопротивление нагрузки RH включается между средней точкой трансформатора и средней точкой обмоток преобразователя.
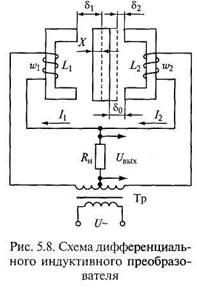
В такой схеме ток Iвых, протекающий по сопротивлению нагрузки, равен разности токов правой и левой половин схемы. В векторной форме это равенство примет следующий вид:
а выходное напряжение
При отсутствии входного сигнала зазоры δ1 и δ2 между якорем и ярмом одинаковы: δ1 = δ2 = δ0. Равны и индуктивности L 1 и L 2 обеих половин датчика, определяемые размерами зазоров. Следовательно, выходное напряжение преобразователя U вых равно нулю (рис. 5.9, а).
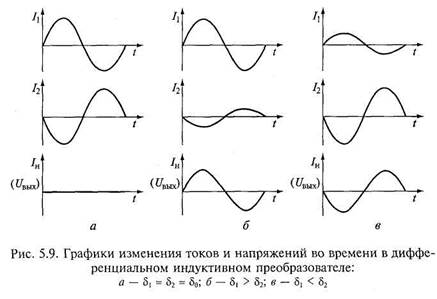
При перемещении якоря на расстояние X зазоры δ1 и δ2 становятся неравными:

Изменение зазоров приводит к изменению индуктивностей: увеличение δ1 ведет к уменьшению L 1 а уменьшение δ1 — к увеличению L 2 . Изменение индуктивностей плечей датчика приводит к дисбалансу токов I1 и I2, в результате чего через сопротивление нагрузки потечет ток Iн = Iвых, и появится выходное напряжение (рис. 5.9, б).
Если изменяется направление перемещения якоря, фаза выходного напряжения сдвигается на 180° относительно напряжения питания, являющегося опорным (рис. 5.9, в).
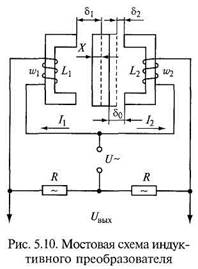
Принцип действия мостовой схемы индуктивного преобразователя (рис. 5.10) аналогичен принципу действия дифференциальной схемы. Выходное напряжение мостовой схемы

В исходном состоянии при δ1 = δ2 = δ0, L 1 = L 2 = Lo , U вых = 0, так как l1 = l2. Перемещение якоря вправо на расстояние X приводит к изменению зазоров: δ1 = δ0 + X ; δ2 = δ0 - X , а также индуктивностей плечей моста:

Считая, что активное сопротивление обмоток мало по сравнению с их индуктивным сопротивлением, можно записать комплексные выражения величин l1 и l2 в следующий алгебраической форме:

где j — мнимая единица.
Тогда разность токов

На основании выражения (5.8) можно записать: L 2 – L 1 = 2ΔL ; L 2 + L 1 = 2 L 0 ; L 2 L 1 = L 0 2 - ΔL 2 = ΔL 2 . При малых изменениях зазора 5 функция L = f ( x ) практически линейна, и для нее справедливо отношение ΔL = ( L 0 /δ0) X ; соответственно выражение (5.9) будет иметь вид
Умножив и разделив последнее выражение на ( R – jwL 0 )2 и выделив действительную и мнимую части, получим модуль разности токов I 1 и I 2:
а выходное напряжение согласно формуле (5.7) запишем в виде

Так как все параметры за исключением X являются постоянными, то выражение (5.10) можно привести к виду
где K = 2 UwL 0 R/[δ0( R 2 + w2L02)] -коэффициент преобразования индуктивного датчика.
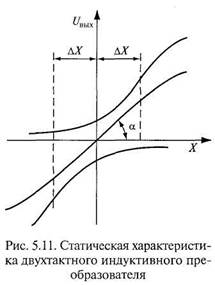
Таким образом, статическая характеристика двухтактного индуктивного измерительного преобразователя представляет собой функцию вида U вых = KX 1 что соответствует прямой, проходящей через начало координат под углом α = arctg K (рис. 5.11).
Как видно из рисунка, при изменении направления перемещения входной величины X фаза выходного сигнала изменяется на 180°. Кроме того, с увеличением входного сигнала наблюдается отклонение выходной характеристики от линейной, что объясняется уменьшением индуктивного сопротивления wL и приближением его значения к сопротивлению нагрузки. В связи с этим значение ΔX для реверсивных индуктивных датчиков не должно превышать (0,3...0,4)δ0. В этом случае выходную характеристику можно считать линейной.
Двухтактные измерительные преобразователи с плоскопараллельным воздушным зазором используют при измерении малых перемещений от сотых долей микрометра до 3...5 мм.
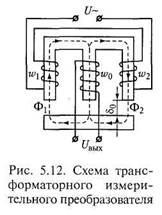
Трансформаторные измерительные преобразователи. Схема трансформаторного измерительного преобразователя приведена на рис. 5.12. Обмотки цепи питания w 1 и w 2 одинаковы и включены таким образом, что, когда по ним протекает рабочий ток, создаваемые ими магнитные потоки Ф) и Ф2 направлены встречно в центральном стержне, на котором расположена выходная обмотка w 0 . В этом случае выходное напряжение
где f — частота питающего напряжения. Если считать ток /в цепи питания постоянным, что достигается включением в цепь питания дополнительного дросселя для однотактных датчиков или соответствующим включением обмоток питания двухтактных датчиков, то магнитные потоки пропорциональны индуктивностям обмоток w 1 и w 2 :

Так как в рассматриваемой конструкции преобразователя зазор остается постоянным, а якорь перемещается вдоль зазора, то значение индуктивности зависит от сечения магнитного сердечника, определяемого площадью перекрытия S стержней, которая изменяется при перемещении якоря.
В нейтральном положении при X = 0 площади перекрытия стержней равны: S 1 = S 2 = S 0 , что приводит к равенству потоков: Ф1 = Ф2 и, следовательно, U вых = 0.
При перемещении якоря влево на расстояние X площадь перекрытия правого крайнего стержня изменится на ΔS , и для потоков в крайних стержнях можно записать:

Выходное напряжение датчика можно описать линейной зависимостью U вых = KΔS = K 1 X , так как площади перекрытия стержней пропорциональны перемещению якоря X , Коэффициент преобразования на основании приведенных выше выражений можно записать в виде

Из сравнения формул (5.10) и (5.11) видно, что все приведенные ранее соображения о влиянии конструктивных параметров на характеристики индуктивного датчика справедливы и для трансформаторных датчиков.
К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств; высокие чувствительность и разрешающую способность; сравнительную простоту конструкции; высокую надежность; малые массу и размеры при расчете на напряжение повышенной частоты; невысокую стоимость.
Недостатками рассмотренных измерительных преобразователей являются трудность регулировки и компенсации начального напряжения на их выходе; необходимость экранирования для уменьшения уровня помех, что обусловливает увеличение размеров и массы; возможность работы только на переменном токе; ограниченность диапазона линейной статической характеристики.
5.6. Емкостные датчики
Принцип действия емкостных измерительных преобразователей основан на изменении емкости конденсатора под воздействием входной преобразуемой величины. Емкость конденсатора

где ε — относительная диэлектрическая проницаемость диэлектрика; ε0 — диэлектрическая проницаемость вакуума; S — площадь пластины; δ — толщина диэлектрика или расстояние между пластинами.
Из приведенного соотношения видно, что на емкость конденсатора можно влиять изменением площади перекрытия пластин S (рис. 5.13, а), расстояния между ними 8 (рис. 5.13, б), диэлектрической проницаемости е вещества, находящегося в зазоре между обкладками конденсатора (рис. 5.13, в). Выбор того или иного изменяемого параметра зависит от характера измеряемой величины.
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.