
2 – ой случай: приемник движется, а источник неподвижен.








1) Принцип действия и область применения ЭМ преобразователей. Одноконтурный ЭМ преобразователь (нет).
В катушке (1) возникает ЭДС при изменении магнитного потока, протекающего через сердечник катушки (8). Изменение магнитного потока получается вследствие изменения воздушного зазора (5) в магнитной цепи между диафрагмой (3) и полюсным наконечником керна (4). Зазор (5) - l - изменяется при колебании диафрагмы и модулирует магнитный поток, который создается постоянным магнитом (2) и проходит через сердечник катушки, полюсный наконечник, зазор и диафрагму.
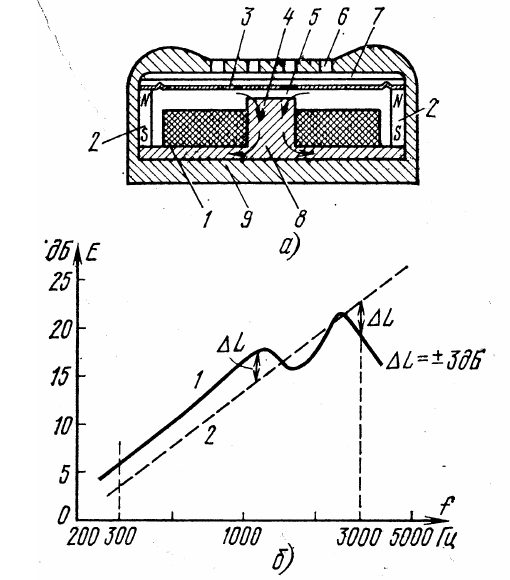
Сердечник и диафрагма выполняются из мягкого магнитного материала (напр. пермаллой), постоянный магнит - из высококоэрцитивных сплавов Al и Ni.
Электромагнитные преобразователи могут быть использованы как для преобразования постоянного тока в переменный, так и для обратного преобразования переменного тока в постоянный.
Электромагнитные преобразователи применяют для измерения скорости, линейного и углового перемещения и других величин, предварительно преобразованных в перемещение.
Они также применяются в приборах уравновешивания, особенно при измерениях небольших отклонений от измеряемой величины, так как величина тока при этом остается почти постоянной и погрешность преобразователя существенно уменьшается.
2) Эквивалентная схема одноконтурного ЭМ преобразователя.
????????????
3) Двухконтурный ЭМ преобразователь.
????????????
4) Индуктивные преобразователи.
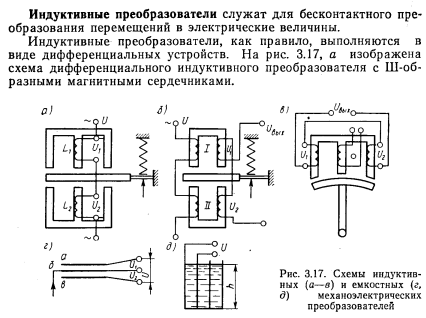
На рисунке А изображен наиболее распространенный преобразователь с малым воздушным зазором δ, который изменяется под действием измеряемой величины Р.
Рисунок А.
Определение L производится по следующей зависимости P→L→Z. Рабочее перемещение в преобразователях с переменным зазором составляет от 0,1 мм до 10 мм.
На рисунке Б изображен преобразователь с разомкнутой магнитной цепью.
Рисунок Б.
Преобразователь представляет собой катушку 1, внутри которой помещен стальной сердечник 2. Перемещение сердечника вызывает изменения индуктивности катушки. Этот тип преобразователей применяется для измерения значительных перемещений сердечника 10÷100 мм. Одним из достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1÷5 ВА), что позволяет пользоваться сравнительно мало чувствительным указателем на выходе измерительной цепи и регистрировать измеряемую величину (например, самопищущим) без предварительного усиления. Лишь при мало габаритных преобразователях приходится использовать усилитель.
На практике индуктивные преобразователи всегда выполняют дифференциальными, потому как это существенно уменьшает погрешность и увеличивает линейный участок характеристики преобразователя.
Наиболее распространенной измерительной цепью является неравновесный измерительный мост. Половинки измерительного преобразователя включаются в два плеча моста.
5) Вихретоковые индуктивные преобразователи.
Принцип действия вихретокового преобразователя основан на изменении индуктивности и взаимной индуктивности катушек при приближении к ним проводящего тела. Глубина проникновения электромагнитной волны в материал определяется формулой  , где
, где  - глубина проникновения в материал при котором волна затухает на 95%.
- глубина проникновения в материал при котором волна затухает на 95%.
На рисунке А показано, как искажается магнитное поле катушки при приближении проводящей пластины.
Рисунок А
Присутствие вблизи витка проводящей среды приводит к изменению его первоначального поля и электрических параметров витка, т.е. активного и реактивного сопротивления. Активное сопротивление витка увеличивается засчёт роста потерь в проводящей среде, а индуктивное сопротивление уменьшается.
Значения вносимых сопротивлений Rвн, Хвн зависят при постоянной частоте питания и геометрических размеров обмотки от расстояния  от обмотки до пластины, электрической проводимости и толщины пластины пока толщина не превышает d
от обмотки до пластины, электрической проводимости и толщины пластины пока толщина не превышает d  2 .
2 .
Вихретоковые преобразователи находят широкое применение в области бесконтактного контроля линейных размеров тонких пластин и толщины покрытий (индукционная толщинометрия) и обнаружения дефектов – поверхностных царапин и трещин. Для этих целей используются: накладные - рисунок Б, экранные - рисунок В и щелевые - рисунок Г, датчики.
Рисунок Б, В, Г.
Применять вихретоковые датчики для измерения перемещения имеет смысл только в тех случаях, когда датчик не должен иметь ферромагнитных включений, так как чувствительность вихретокового преобразователя к перемещению в 5 – 20 раз меньше чувствительности такого же по габаритам индуктивного преобразователя с катушкой, помещенной в магнитопровод с перемещающимся сердечником. Кроме того, вихретоковые преобразователи имеют большие погрешности, обусловленные температурными изменениями электрической проводимости проводящего тела.
6) Магнитоупругие преобразователи.
Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости  ферромагнитных тел в зависимости от возникающих в них механических напряжений (магнитоупругий эффект), обусловленных воздействием на ферромагнитные тела механических сил (растягивающая, сжимающая, изгибающая и скручивающая сила). Относительное изменение магнитной проницаемости
ферромагнитных тел в зависимости от возникающих в них механических напряжений (магнитоупругий эффект), обусловленных воздействием на ферромагнитные тела механических сил (растягивающая, сжимающая, изгибающая и скручивающая сила). Относительное изменение магнитной проницаемости  для различных материалов составляет 0,5 – 3% при изменении
для различных материалов составляет 0,5 – 3% при изменении  на 1МПа, где
на 1МПа, где  - механическое напряжение.
- механическое напряжение.
Типы магнитоупругих преобразователей можно разбить на две основные группы. К первой группе относятся преобразователи, в которых используется изменение магнитной проницаемости чувствительного элемента в одном направлении; магнитный поток в них направлен в большей части магнитной цепи вдоль линий действия усилия. В преобразователях этой группы под действием измеряемой силы изменяется индуктивность обмотки (рисунок а) или индуктивность между обмотками (рисунок б).
Рисунок а, б
В первом случае реализуется следующая цепь преобразования:
 , во втором случае:
, во втором случае:  ,
,
 - взаимная индуктивность.
- взаимная индуктивность.
Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях или, иначе говоря, магнитная анизотропия материала чувствительного элемента. В этих преобразователях магнитный поток направлен под углом 45о к линиям действия измеряемого усилия (рисунок в).
Рисунок в
В ненагруженном состоянии преобразователя силовые линии первичной обмотки (рисунок г) располагаются симметрично и не сцепляются со вторичной обмоткой, в результате этого ЭДС вторичной обмотки равна 0.
Рисунок г, д
После приложения усилия вследствие изменения магнитной проницаемости материала, магнитные силовые линии (рисунок д) «вытягиваются» в направлении большей проницаемости, «сокращаются» в направлении меньшей проницаемости, и сцепляясь со вторичной обмоткой, индуктируют в ней ЭДС, пропорциональную приложенному к преобразователю усилию. При изменении знака нагрузки изменяется и фаза выходной ЭДС. Из-за начальной магнитной анизотропии материала при отсутствии нагрузки уже существует некоторая ЭДС. Для ее уменьшения в датчиках из листового материала чередуют листы с взаимно перпендикулярными направлениями проката, кроме этого специальным образом располагают отверстия, выбирая угол между обмотками; используют дополнительную обмотку или магнитный шунт.
7) Погрешности магнитоупругих преобразователей. Область применения.
Магнитоупругая погрешность выражает невоспроизводимость магнитного состояния сердечника преобразователя при нагрузке и разгрузке.
По своему значению погрешность  обычно превышает остальные погрешности и равна 1 – 4%. Для получения возможно меньшей погрешности магнитная цепь датчика работающей как упругий элемент должна в первую очередь удовлетворять требованиям предъявляемым к упругим элементам, то есть элемент должен быть монолитным, выполненным из материала с высоким пределом упругости, рабочая часть элемента должна быть удалена от точек приложения силы, так для датчика с магнитной цепью рисунок в погрешность при переходе от листового материала к сплошному уменьшается от 1,5 – 4% до 0,3%. Однако при этом значительно уменьшается чувствительность датчика, так как магнитная анизотропия сплошного материала меньше чем листового, в этом смысле лучше материалы с комбинированным сердечником. Существенной может оказаться также погрешность линейности как определяемая преобразованием
обычно превышает остальные погрешности и равна 1 – 4%. Для получения возможно меньшей погрешности магнитная цепь датчика работающей как упругий элемент должна в первую очередь удовлетворять требованиям предъявляемым к упругим элементам, то есть элемент должен быть монолитным, выполненным из материала с высоким пределом упругости, рабочая часть элемента должна быть удалена от точек приложения силы, так для датчика с магнитной цепью рисунок в погрешность при переходе от листового материала к сплошному уменьшается от 1,5 – 4% до 0,3%. Однако при этом значительно уменьшается чувствительность датчика, так как магнитная анизотропия сплошного материала меньше чем листового, в этом смысле лучше материалы с комбинированным сердечником. Существенной может оказаться также погрешность линейности как определяемая преобразованием  так и дальнейшим преобразованием
так и дальнейшим преобразованием  ,
,  .
.
Выбором индукции В в материале преобразователя созданием предварительно напряженного состояния его а также взаимной коррекции нелинейностей удается снизить суммарную погрешность линейности до 1 – 2%.
При изменении напряжения питания меняется как начальное значение магнитной проницаемости так и магнитоупругой чувствительности поэтому стабилизация напряжения питания необходима для всех типов преобразователей. Уменьшение погрешности достигается также применением дифференциальных преобразователей. Однако при их конструировании встречается ряд трудностей обусловленных необходимостью такой передачи измеряемой силы на преобразователи чтобы один из них испытывал деформацию сжатия а другой деформацию растяжения.
Магнитоупругие датчики применяются для измерения сил, давлений, крутящих моментов. Мощность развиваемая датчиком как правило достаточная для непосредственного включения указателя без предварительного усиления. Датчик обладает высокой надежностью, так как не имеет подвижной части перемещающейся под действием входной величины. Датчик представляет собой жесткий элемент имеющий собственную частоту колебаний в диапазоне от 1 до 10 кГц и позволяющий измерять как статические, так и высокочастотные динамические величины.
8) Индукционные преобразователи.
Индукционные преобразователи основаны на использовании явления электромагнитной индукции, согласно закону электромагнитной индукции ЭДС в контуре  , где
, где  - потокосцепление с контуром . Таким образом выходной величиной индукционного преобразователя является ЭДС, а входной скорость изменения потокосцепления.
- потокосцепление с контуром . Таким образом выходной величиной индукционного преобразователя является ЭДС, а входной скорость изменения потокосцепления.
В общем случае индукционный преобразователь представляет собой катушку с сердечником которая характеризуется некоторым обобщенным параметром Y и ЭДС в которой может индуктироваться как в результате изменения внешнего магнитного поля, так и в результате изменения во времени параметра Y преобразователя.
Если преобразователь находится в однородном магнитном поле с индукцией В то в его обмотке имеющей  витков наводится ЭДС
витков наводится ЭДС
 (1).
(1).
Обобщенный параметр Y преобразователя определяется выражением
 , является функцией четырех частных параметров:
, является функцией четырех частных параметров:
 - угол между магнитной осью преобразователя совпадающей с нормалью к плоскости обмотки и вектором магнитной индукции,
- угол между магнитной осью преобразователя совпадающей с нормалью к плоскости обмотки и вектором магнитной индукции,
 - площадь поперечного сечения катушки,
- площадь поперечного сечения катушки,
 - магнитная проницаемость среды в единицах
- магнитная проницаемость среды в единицах  ,
,
 - коэффициент размагничивания сердечника, определяемый формой и соотношением размеров сердечника.
- коэффициент размагничивания сердечника, определяемый формой и соотношением размеров сердечника.
Наименьший коэффициент размагничивания имеет торроид.
Обычно в преобразователе изменяется один из параметров при постоянном значении основных.
Для катушек без сердечников (без  и
и  ) преобразования упрощаются и для основных видов преобразователей сводятся к следующим:
) преобразования упрощаются и для основных видов преобразователей сводятся к следующим:
а) для неподвижной катушки в переменном магнитном поле  ,
, 
 ;
;
б) для катушки вращающейся с частотой  в постоянном магнитном поле с индукцией
в постоянном магнитном поле с индукцией 
в) для контура отдельные участки которого линейно перемещаются в магнитном поле изменяя площадь потокосцепления с контуром.
 , где
, где  - путь,
- путь,  - скорость подвижного участка.
- скорость подвижного участка.
г) для отрезка длинной  движущегося в однородном магнитном поле со скоростью
движущегося в однородном магнитном поле со скоростью  так, что направление векторов
так, что направление векторов  взаимно перпендикулярны, тогда
взаимно перпендикулярны, тогда  .
.
Индукционные преобразователи широко применяются для измерения параметров магнитных полей, частоты вращения, параметров вибрации и сейсмических колебаний, расхода жидких веществ.
9) Индукционные преобразователи для измерения параметров магнитных полей.
Для измерения магнитной индукции переменного магнитного поля применяются преобразователи со стационарными (неподвижными) обмотками.
Функция преобразования преобразователя соответствует уравнению (1.1). Коэффициент преобразования, связывающий действующее значение индуктируемой ЭДС с амплитудным значением индукции, периодически симметрично меняющегося магнитного поля определяется выражением:
 ,
,  - коэффициент формы кривой,
- коэффициент формы кривой,  - частота переменного магнитного поля.
- частота переменного магнитного поля.
При искаженной форме кривой обычно измеряют среднее значение индуктируемой ЭДС  .
.
Для измерения индукции постоянного магнитного поля могут быть использованы, как преобразователи с условно стационарной обмоткой, так и преобразователи с принудительным движением обмотки.
В преобразователях со стационарной обмоткой изменение магнитного потока, сцепляющегося с витками обмотки, может происходить в результате изменения самого измеряемого поля (от 0 до устоявшегося значения).
Индукционные преобразователи для измерения параметров магнитных полей в воздушном пространстве выполняются в виде измерительных катушек различной формы, начало и конец обмотки находятся в одном месте, чтобы не создавались дополнительные контуры за счет подводящих проводов.
Для измерения напряженности магнитного поля при испытании ферромагнитных материалов используются плоские измерительные катушки (рисунок а), помещаемые на поверхность испытуемого образца; при этом измеренная в воздухе напряженность поля принимается равной напряженности поля на поверхности образца и чем ближе катушка к поверхности, то есть чем она тоньше, тем точнее измерения.
Рисунок а
Для измерения магнитной индукции и напряженности неоднородных магнитных полей целесообразно использовать шаровые индукционные преобразователи (рисунок б).
Рисунок б
Для измерения МДС используются индукционные преобразователи, называемые магнитными потенциалометрами, обычно выполняемые в виде равномерной обмотки на гибком изоляционном каркасе. Обмотка выполняется с четным числом слоев так, чтобы выводы находились в середине обмотки (рисунок в).
Рисунок в
Магнитный потенциалометр помещается в магнитное поле таким образом, чтобы его концы находились в точках А и В, между которыми измеряется МДС. Магнитный поток сцепляющийся с витками потенциалометра равен  .
.
10) Индукционные преобразователи для измерения частоты вращения.
Для измерения частоты вращения используется  и
и  преобразователи. Конструктивно они отличаются от преобразователей магнитной индукции тем, что дополняются устройством (обычно постоянный магнит) создающим магнитное поле с заданной индукцией, а вращение подвижных элементов осуществляется объектом, частота вращения которого измеряется. На рисунке а показано принципиальное устройство тахогенератора, выходная ЭДС которого
преобразователи. Конструктивно они отличаются от преобразователей магнитной индукции тем, что дополняются устройством (обычно постоянный магнит) создающим магнитное поле с заданной индукцией, а вращение подвижных элементов осуществляется объектом, частота вращения которого измеряется. На рисунке а показано принципиальное устройство тахогенератора, выходная ЭДС которого  , где
, где  - частота вращения катушки:
- частота вращения катушки:
Рисунок а
Для измерения частоты вращения используется также N преобразователи с неподвижной обмоткой рисунок б.
Рисунок б
В этом преобразователе постоянный магнит и катушка, содержащая две полуобмотки с числом витков  неподвижны. При вращении ротора происходит перераспределение магнитного потока постоянного магнита: увеличивается поток через полюс магнитопровода, под которым проходит зубец ротора, и уменьшается поток через полюс, под которым проходит паз ротора. Поток постоянного магнита при этом остается неизменным Ф, так как полное магнитное сопротивление для суммарного потока остается почти постоянным. Таким образом, в части магнитопровода, образованной полюсами 1 и 2 и ротором, за счет изменения размагничивания полюсов при вращении ротора появляется переменная составляющая магнитного потока и в катушке индуктируется ЭДС, частота
неподвижны. При вращении ротора происходит перераспределение магнитного потока постоянного магнита: увеличивается поток через полюс магнитопровода, под которым проходит зубец ротора, и уменьшается поток через полюс, под которым проходит паз ротора. Поток постоянного магнита при этом остается неизменным Ф, так как полное магнитное сопротивление для суммарного потока остается почти постоянным. Таким образом, в части магнитопровода, образованной полюсами 1 и 2 и ротором, за счет изменения размагничивания полюсов при вращении ротора появляется переменная составляющая магнитного потока и в катушке индуктируется ЭДС, частота  которой определяется частотой вращения
которой определяется частотой вращения  и числом зубцов ротора
и числом зубцов ротора  ;
;  . А амплитуда этой переменной составляющей
. А амплитуда этой переменной составляющей  , где
, где  - амплитуда переменной составляющей потока. В подобных преобразователях в качестве выходной величины чаще используют не ЭДС, а частоту.
- амплитуда переменной составляющей потока. В подобных преобразователях в качестве выходной величины чаще используют не ЭДС, а частоту.
11) Индукционные преобразователи параметров вибрации.
Принцип действия преобразователя виброскорости поясняет рисунок:
В катушке, колеблющейся в зазоре, индуктируется ЭДС:
 ,
,
BN – индукция в зазоре; w – число витков; lср – средняя длина витка.
Чтобы получить значение виброперемещения или виброускорения выходной сигнал подается соответственно на интегрирующий или дифференцирующий усилитель. Во избежание нелинейных искажений выходного электрического сигнала, повторяющего по форме входной механический сигнал, усредненное по всем виткам значение индукции при колебаниях катушки должно оставаться постоянным. Для этих целей длина катушки l выбирается или меньше ширины зазора l0 так, чтобы при колебаниях катушка не доходила до его краёв или больше ширины зазора так, чтобы края катушки были всегда за пределами зазора. Обычно индукционные преобразователи применяются для измерения параметров вибраций в диапазоне частот 1 – 50 Гц при амплитуде вибраций не более 1 – 5 мм. Чувствительность индукционных преобразователей сейсмоприёмников у конкретного преобразователя достигает 140 В/м/с.
12) Индукционные преобразователи расходомеров.
Принцип действия индукционного преобразователя расходомера поясняется рисунком ниже. Потоки жидкости, движущийся в трубопроводе 1 из немагнитного материала между полюсами магнита возникает ЭДС, значение которой пропорционально скорости движения потока.
 , где В – магнитная индукция, D – диаметр трубы, V – скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированными от трубопровода.
, где В – магнитная индукция, D – диаметр трубы, V – скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированными от трубопровода.
Как видно из приведенного уравнения генерируемая в преобразователе ЭДС не зависит от свойств жидкости и поэтому индукционные расходомеры принципиально могут быть применены для самого широкого класса жидкости, однако свойства жидкости определяют внутреннее сопротивление преобразователя и возможности дальнейшего точного преобразования и измерения ЭДС, поэтому в технических характеристиках расходомера всегда указывается минимальная электрическая проводимость жидкости , для измерения расхода которой он может быть применен.
Индукционные расходомеры используют для измерения скоростей в жидких металлах ( жидкостей с электронной проводимостью ), водных растворов ( жидкостей с ионной проводимостью ), возможно применение их для измерения скоростей электрических жидкостей.
Диаметр трубопроводов может быть весьма значительным и поэтому для создания магнитного поля используют обычно не постоянные магниты, а электромагниты. В расходомерах для жидких металлов применяется электромагниты, питаемые постоянным током. В расходомерах для воды и электролитов используется электромагниты, питаемые для исключения напряжения поляризации только переменным током частоты 10 – 1000 Гц.

В этом случае выходной сигнал так же является переменной ЭДС и из него легко могут быть исключены гальваническая и термо ЭДС . Однако в переменном магнитном поле кроме ЭДС, обусловленной движением контура будет индуктироваться трансформаторная ЭДС.
Для того, чтобы уменьшить трансформаторную ЭДС провода вторичного контура стремятся расположить так, чтобы площадь Sk сцепления контура с переменным потоком была минимальной. Положение проводников, находящихся в поле должно быть строго фиксировано, чтобы величина Sk не изменялась. В контур вводятся специальные компенсационные петли ( обмотка W1), в которых наводится ЭДС  , включаемая встречно с ЭДС
, включаемая встречно с ЭДС  , регулируемая так , чтобы :
, регулируемая так , чтобы :

13) Магнитомодуляционные преобразователи.
Магнитомодуляционным называется преобразователь, действие которого основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянных и переменных полях. Модуляция магнитным потоком возможна за счет нелинейных свойств магнитной цепи.
В измерительной технике ММП применяются для измерения напряженности магнитного поля (феррозонды), для преобразования постоянного тока в переменный с уменьшением абсолютного значения тока (измерительные трансформаторы постоянного тока), для преобразования постоянного тока в переменный с увеличением абсолютного значения тока (магнитные усилители), для измерения перемещения объекта, с которым связывается подвижная часть преобразователя, несущая постоянный магнит (магнитомодуляционные перемещения).
На рисунке представлена упрощенно в виде ломаной линии 1 основная кривая намагничивания  ферромагнитного материала. Там же показана кривая 2 магнитной проницаемости
ферромагнитного материала. Там же показана кривая 2 магнитной проницаемости  и кривая 3 магнитной проницаемости
и кривая 3 магнитной проницаемости  .
.
На этом же рисунке даны кривые 4, 5, 6 напряженностей переменного магнитного поля  , наложенного на постоянное магнитное поле с напряженностью
, наложенного на постоянное магнитное поле с напряженностью  , при этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля может быть как меньше, так и больше напряженности насыщения
, при этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля может быть как меньше, так и больше напряженности насыщения  .
.
Для магнитной цепи ММП характерны 3 режима работы:
а)

б)
в)
В первом режиме, показанном на рисунке а), магнитное сопротивление переменному потоку зависит от величины и при  может быть определено дифференциальной магнитной проницаемостью
может быть определено дифференциальной магнитной проницаемостью  . При сравнимых величинах
. При сравнимых величинах  и
и  для анализа работы магнитной цепи используются характеристики двойного намагничивания
для анализа работы магнитной цепи используются характеристики двойного намагничивания  .
.
Во втором режиме модулирующим является постоянное поле. Сердечник находится в режиме насыщения и выходит из него в те полупериоды переменного напряжения, когда напряженность  направлена навстречу и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения.
направлена навстречу и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения.
В третьем режиме модулирующим является переменное поле. Для постоянного магнитного поля сердечник работает в ключевом режиме, включаясь дважды за каждый период.
14) Магнитомодуляционные преобразователи перемещения.
Принцип действия преобразователя показан на рисунке:
Между двумя сердечниками 1 и 2 из листовой стали расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и следовательно в каждом из сердечников действуют одинаковые индукции постоянного подмагничивания, равные
 - поток магнита.
- поток магнита.
 - коэффициент рассеяния.
- коэффициент рассеяния.
 -площадь сечения сердечника.
-площадь сечения сердечника.
На сердечник 1 намотано обмотка с числом витков W, а сердечник 2 служит магнитным шунтом. Обмотка через резистор Rн подключена к источнику переменного тока 50 Гц . При перемещении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает.
Магнитное сопротивление переменному потоку возрастает. Индуктивность обмотки падает. Ток и падение напряжения на резисторе Rн увеличивается. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной – падение напряжения на резисторе Rн, то есть чем больше х, тем больше URн.

15) Феррозонды.
Используются для измерения малых магнитных полей. На рисунке изображена схема дифференциального феррозонда, состоящая из двух ферромагнитных сердечников 1 и 2 из железоникелевого сплава, на каждом из которых имеется модулирующая обмотка с числом витков W1. Обмотки питаются от источника переменного тока. Обмотки включаются последовательно, но встречно, так , что создаваемые ими переменные магнитные потоки сдвинуты на 1800 .
А
Оба сердечника с модулирующими обмотками охватывает измерительная обмотка с числом витков W2. При идентичности сердечников вследствие встречного включения модулирующих обмоток в измерительной обмотке не будет индуктироваться ЭДС.
Напряженность переменного магнитного поля
Таким образом материал в сердечниках работает в режиме рис.в) раздела 6.6. Магнитная проницаемость обоих сердечников изменяется одинаково и два раза за период возрастает до максимального значения.
Если феррозонд пометить в постоянное магнитное поле с индукцией Вх, то условно можно считать, что в это поле дважды за период вносится концентратор поля и возникающие импульсы наводят ЭДС в измерительной обмотке.
Наиболее широкое применение получили феррозонды с продольным возбуждением с разомкнутой (рис.А) или замкнутой (рис.В) магнитной цепью.
В
Для измерения сильных полей применяется метод уравновешивания , при котором феррозонд используется в качестве преобразователя неравновесия.
Феррозонды применяются для измерения магнитной индукции слабых постоянных и медленно изменяющихся ( с частотой не более 100 Гц ) магнитных полей, для измерения углов между какими-либо осями объекта и вектором магнитной индукции, для обнаружения ферромагнитных объектов, для изменения магнитной восприимчивости и магнитного момента слабомагнитных веществ.
Благодаря высокой чувствительности, простоте конструкции, малым габаритам и высокой надежности феррозондовые преобразователи широко используются в качестве портативных авиационных и ракетных тесламетров, градиентометров и угломеров, при исследовании магнитного поля Земли, космического пространства, в магнитных системах навигации и ориентации, магнитной дефектоскопии и при поиске полезных ископаемых.
16) Эффект Доплера.
Эффект Доплера описывает сдвиг частоты сигнала в зависимости от относительности движения источника и приемника. Так, волна посланная источником, которая удаляется о приемника будет приниматься им на меньшей частоте по сравнению с частотой волны о неподвижного источника. Если же приемник приближается к неподвижному источнику, то частота принимаемая им волны будет больше по сравнению ситуацией с неподвижным приемником. Этот эффект был открыт в 1842 году Доплером. Возможны ситуации когда приемник неподвижен, а источник приближается и когда источник неподвижен, а приемник удаляется.
1-ый случай: источник движется приемник неподвижен. Допустим, источник излучающий импульсы с периодом Т, движется со скоростью u по направлению к покоящемуся источнику.
Рисунок
В момент времени t = 0 расстояние между источником и приемником равно L. Первый импульс достигает приемника в момент времени  , где U – скорость волны. Второй импульс будет послан приемнику в момент времени t = T, когда расстояние между источником и приемником будет:
, где U – скорость волны. Второй импульс будет послан приемнику в момент времени t = T, когда расстояние между источником и приемником будет:
Таким образом, второй импульс достигнет приемника в момент времени  .
.
Таким образом, когда источник движется по направлению к преемнику, частота регистрируемого сигнала увеличивается на величину  , называемого доплеровским сдвигом частоты.
, называемого доплеровским сдвигом частоты.
Наоборот, когда источник движется от приемника, частота регистрируемого сигнала увеличивается в соответствии с выражением:
В случае движения источника при неподвижном приемнике эффект Доплера возникает из-за того, что изменяется длина волны, распространяющейся от источника к приемнику (частота волны).
2 – ой случай: приемник движется, а источник неподвижен.
Рисунок
В этом случае длина волны не изменится, а доплеровский сдвиг частоты возникает из-за того, что изменяется скорость волны W по отношению к приемнику.
 -в случае движения по направлению к источнику
-в случае движения по направлению к источнику
 -движение приемника от источника
-движение приемника от источника
Применение: позволяет изучать скорость источников излучения или рассеивающих волны объектов и находит широкое практическое применение.
17) Явление сверхпроводимости. Туннельный эффект (только читать).
При наличии температуры многие металлы и сплавы переходят в сверхпроводящее состояние. Этот переход происходит при вполне определенной для каждого материала Тс - называемой критической. Сверхпроводимость характеризуется идеальной электропроводностью (сопротивление электрическому току равно нулю, если плотность тока меньше некоторой критической величины jc) и идеальным диамагнетизмом (индукция магнитного поля внутри сверхпроводника равна нулю, если ее значение снаружи меньше критического Вс ).
В микроскопической теории сверхпроводимости важным моментом является достаточно сильное притяжение между двумя электронами возникающего при поляризации кристаллической решетки. Два электрона с противоположными спинами и направлением движения объединяются в пару, называемую куперовской. Эти пары обладают нулевым суммарным спином и поэтому являются Базе – частицами, то есть частицами подчиняющимися распределению Базе – Эйнштейна.
Рис. а
В отличие от электронов в атомах и других микрочастицах, поведение которых описывается квантовой теорией. Сверхпроводимость – это макроскопическое квантовое явление. Длина сверхпроводящей проволоки, по которой течет незатухающий ток может достигать нескольких метров и километров, при этом носители тока в ней описываются одной волновой функцией.
Туннельный эффект – типичная задача квантовой механики. Частица, например электрон, в металле подлетает к барьеру ( например к слою диэлектрика), преодолеть который она классическими представлениями никак не может, так как ее кинетическая энергия недостаточна, хотя в области за барьером она со своей кинетической энергией вполне могла бы существовать. Напротив, согласно квантовой механике прохождение барьера возможно, частица с некоторой вероятностью может пройти по туннелю через классически зараженную область где ее потенциальная энергия больше полной, то есть классическая кинетическая энергия отрицательна. На самом деле, с точки зрения квантовой механики для микрочастицы (электрона), справедливо соотношение неопределенностей:
х – координата частицы
р – импульс частицы
Когда мала неопределенность, ее координаты в диэлектрике  , приводит к большой неопределенности ее импульса:
, приводит к большой неопределенности ее импульса:
 ,
,
а следовательно и кинетическая энергия  , m – масса частицы, то знак сохранения энергии не нарушится.
, m – масса частицы, то знак сохранения энергии не нарушится.
18) Стационарный эффект Джозефсона (только читать).
Джозефсон рассмотрел частный случай туннельного эффекта – эта тунелирование куперовских пар и предсказал существование двух эффектов. Первый через туннельный переход с тонким слоем диэлектрика, когда его толщина меньше или порядка длины когерентности  возможно протекание сверхпроводникового тока, то есть тока без сопротивления.
возможно протекание сверхпроводникового тока, то есть тока без сопротивления.
В основе эффекта Джозефсона лежат квантовые свойства сверхпроводящего состояния. Действительно, сверхпроводниковые состояния характеризуются когерентностью куперовских пар, то есть эти пары электронов находятся на одном квантовом уровне и описываются общей для всех пар волновой функцией её амплитудой и фазой. Пары когерентны как частицы света – фотоны в излучении лазера, которые также характеризуются амплитудой и фазой электромагнитной волны.
Стационарный эффект Джозефсона состоит в том, что достаточно слабый ток I (меньше критического тока слабой связи Ic), протекает без сопротивления, то есть не происходит падения напряжения. Джозефсон получил выражение для такого тока:
j - разность фаз волновых функций по разные стороны слабой связи
Джозефсон предсказал, что в области диэлектрической прослойки будут интерферировать когерентные токи, исходящие из обоих сверхпроводников так же как световые волны от двух когерентных источников, поэтому результирующий ток оказывается пропорциональным sinj.
19) Квантовая интерференция.
Экспериментально было обнаружено, максимальный сверхпроводниковый ток Ic в магнитном поле параллельном плоскости контакта не монотонно зависит (с периодом равным кванту потока Ф0) от величины магнитного потока Ф, проникающего в контакт.
Рисунок
Im – максимально возможное значение, которое может принимать ток Ic.
Как видно из рисунка, в случае когда поток равен числу квантов Ф0 происходит компенсация токов текущих в противоположные стороны в разных точках контакта и результирующий критически ток окажется равным нулю. Этот график аналогичен зависимости интенсивности света на экране при дифракции на одиночной щели от расстояния до центра точки и наглядно демонстрирует волновые свойства сверхпроводящих токов.
Пусть сначала внешнее поле и ток в контуре равен нулю, поток Ф при этом также равен нулю.
Рисунок
Увеличим внешнее поле и по закону индукции Фарадея в контуре появиться сверхпроводящий ток. Своим магнитным полем по закону Ленца компенсируется внешний поток. Так будет происходить, пока ток в контуре не станет равным критическому току контакта Ic.
Рисунок
Для простоты рассмотрения выберем площадь кольца такой, чтобы при I = Ic внешнее поле создавало поток  . Как только ток станет больше Ic сверхпроводимость в контакте нарушится и в контур войдет квант потока Ф0 (рис. г)
. Как только ток станет больше Ic сверхпроводимость в контакте нарушится и в контур войдет квант потока Ф0 (рис. г)
Рисунок
При этом отношение  скачком увеличится на единицу, а направление потока изменится на противоположное, хотя его величина останется прежней Ic.
скачком увеличится на единицу, а направление потока изменится на противоположное, хотя его величина останется прежней Ic.
Таким образом, контур перешел в новое квантовое состояние. При дальнейшем увеличении внешнего поля ток в кольце будет уменьшаться, а поток будет оставаться равным Ф0. ток обратиться в ноль когда внешний поток станет равным Ф0 (рис. д), а затем ток потечет в обратном направлении частично экранирую внешний поток.
Рисунок
При внешнем потоке  ток опять станет равным Ic. Сверхпроводимость нарушится, войдет в следующий квант потока и т.д.
ток опять станет равным Ic. Сверхпроводимость нарушится, войдет в следующий квант потока и т.д.
20) Сверхпроводниковый квантовый интерферометр.
В оптических интерферометрах световую волну на две идущие по разным путям, для этого используется две щели в непрозрачной перегородке или два экрана или другие приспособления. В одну из половинок вносят например изучаемый прозрачный объект и по возникающей разности фаз находят его толщину, показатель приломлеия и другие характеристики. Эта аналогия объясняет смысл термина сверхпроводниковый квантовый интерферометр (СКВИД). В СКВИДе сверхпроводящий ток расщепляется на две части, каждая из которых или только одна проходит свой туннельный контакт, а затем они сводятся вместе, разность фаз при этом изменяется с помощью магнитного поля и поэтому его поток или индукцию можно измерять таким интерферометром. В работающем СКВИДе можно предварительно создать небольшой постоянный ток (смещения), тогда в непосредственной окрестности тех точек где Ic = 0 сверхпровод туннельных контактов (слабых связей) разрушится и присоединенный к СКВИДу вольтметр покажет падение напряжения. Тогда, уже при изменении потока на сотые или даже тысячные доли кванта Ф0 в близи такой точки на СКВИДе появиться достаточно большое напряжение пропорциональное величине магнитного поля. Таким путем чувствительность к магнитному потоку доводят до  , применяя преобразователи различных физических величин в поток магнитного поля получают очень чувствительные измерители тока, напряжения, температуры и т.д. на практике наибольшее распространение СКВИДы получили в медицине, физик и дефектоскопии. Их большие преимущества перед другими приборами для измерения магнитных полей – это сверхвысокая чувствительность и возможность бесконтактных измерений. Это позволяет регистрировать очень слабые магнитные поля связанные со слабыми электрическими токами возникающими в живых организмах.
, применяя преобразователи различных физических величин в поток магнитного поля получают очень чувствительные измерители тока, напряжения, температуры и т.д. на практике наибольшее распространение СКВИДы получили в медицине, физик и дефектоскопии. Их большие преимущества перед другими приборами для измерения магнитных полей – это сверхвысокая чувствительность и возможность бесконтактных измерений. Это позволяет регистрировать очень слабые магнитные поля связанные со слабыми электрическими токами возникающими в живых организмах.
21) Эффект Мессбауэра.
Эффект заключается в поглощении или испускании g - квантов атомными ядрами связанными в твердом теле, не сопровождающимися изменением внутренней энергии тела, то есть испусканием или поглощением фотонов. При испускании или поглощении ядрами g - кванта, система содержащая это ядро приобретает импульс
Е0 – энергия g - кванта, соответствующая данному квантовому периоду
с – скорость света


m – масса тела
В результате отдачи линии испускания и поглощения свободных и неподвижных ядер смещены в разные стороны на величину 2DЕ. В твердом теле благодаря взаимодействию атомов значение отдачи превращается в энергию колебаний кристаллической решетки, то есть отдача приводит к рождению добавочных фононов. Если энергия отдачи на одно ядро меньше средней энергии фонона характерной для данного кристалла, то не каждое поглощение g - кванта будет сопровождаться рождением фонона.
Эффект Мессбауэра можно наблюдать до температуры 10000С. Вероятность этого эффекта тем больше чем больше характерная для данного кристалла средняя энергия фононов.
Измерение вероятности эффекта Мессбауэра и ее зависимости от температуры позволяет получить сведения об особенностях взаимодействия атомов в твердых телах и о колебаниях атомов в кристаллической решетке. Измерения, в которых используется эффект Мессбауэра отличаются высокой избирательность, так как в каждом эксперименте резонансное поглощение наблюдается только для ядер одного сорта. Оно позволяет эффективно применять данный эффект в тех случаях когда атомы, на ядрах которых наблюдается эффект Мессбауэра входят в состав твердых тел в виде примеси. Этот эффект используется для исследования электронных состояний примесных атомов в металлах или полупроводниках и для изучения особенностей колебаний примесных атомов в кристаллах.
Мессбауровская спектроскопия – это метод изучения взаимодействия ядра с электрическими или магнитными полями, создающими его окружение.
Структурная схема мессбауэровского спектрометра
Рисунок
Источнику g - излучений сообщается скорость u относительно поглощения, при этом энергия g - квантов изменяется на величину  .
.
Е0 – энергия g - перехода
u - находится в интервале от  и приводит к смещению линии на величину порядка ее естественной ширины.
и приводит к смещению линии на величину порядка ее естественной ширины.
Такой спектрометр измеряет зависимость резонансного поглощения g - квантов от скорости источника u, максимальное поглощение наблюдается, когда сдвиг мессбауэровской линии вызывает этим воздействием компенсируется доплеровским сдвигом.
22) Эффект ядерного магнитного резонанса.
111 Заключается в избирательном поглощении электромагнитной энергии веществом, обусловленным ядерным парамагнетизмом. ЯМР – один из методов радиоспектроскопии, наблюдается, когда на исследуемый образец действуют взаимно перпендикулярные магнитные поля. Сильная постоянная  и слабая радиочастотная
и слабая радиочастотная 
 . Являясь квантовым эффектом, ЯМР как и другие виды магнитных резонансов допускает классическое объяснение своих особенностей. Большинство атомных ядер имеет собственный момент количества движения:
. Являясь квантовым эффектом, ЯМР как и другие виды магнитных резонансов допускает классическое объяснение своих особенностей. Большинство атомных ядер имеет собственный момент количества движения:
 - ядерный спин.
- ядерный спин.
 - спин.
- спин.
Спин обуславливает дипольный магнитный момент ядра:

 - гиромагнитное соотношение.
- гиромагнитное соотношение.
 - безразмерная величина , определяемая структурой ядра.
- безразмерная величина , определяемая структурой ядра.
Так называемый g- фактор равен нескольким единицам.
 - ядерный магнитон.
- ядерный магнитон.
 - масса протона.
- масса протона.
 - заряд протона.
- заряд протона.
 - скорость света.
- скорость света.
Магнитный момент ядра  примерно в 1000 раз меньше электронных моментов.
примерно в 1000 раз меньше электронных моментов.
Рисунок а
Поле  , вращающееся в той же плоскости с частотой
, вращающееся в той же плоскости с частотой  , взаимодействует с магнитным моментом
, взаимодействует с магнитным моментом  . Взаимодействие становится заметным, если частота
. Взаимодействие становится заметным, если частота  близка к частоте
близка к частоте  , т.е. частота поля близка к частоте прецессии
, т.е. частота поля близка к частоте прецессии  , а направление вращения
, а направление вращения  и поля
и поля  одинаковы. При
одинаковы. При  наступает резонанс, если даже под действием очень слабого поля
наступает резонанс, если даже под действием очень слабого поля  проекция магнитного момента диполя на
проекция магнитного момента диполя на  изменяется по величине.
изменяется по величине.
Согласно квантовой модели состояние ядерного спина  и магнитного момента
и магнитного момента  в поле
в поле  квантованы, т.е. компонента
квантованы, т.е. компонента  спина
спина  вдоль поля может принимать одно из
вдоль поля может принимать одно из  целочисленных значений и условие:
целочисленных значений и условие:

определяет систему из равноотстоящих уровней энергии, обусловленных взаимодействием ядерного магнитного момента с постоянным магнитным полем  (Рис б.).
(Рис б.).
Рисунок б.
ЯМР возникает в следствие квантования переходов ядер, индуцируемых полем  с нижних энергетических уровней на вышележащие. Переходы сопровождаются поглощением электромагнитной энергии. Поле может быть линейнополяризованным.
с нижних энергетических уровней на вышележащие. Переходы сопровождаются поглощением электромагнитной энергии. Поле может быть линейнополяризованным.
ЯМР как метод исследования ядер, атомов и молекул получил многообразное применение в физике, химии, биологии и технике.
23) Эквивалентные схемы механоэлектрических преобразователей.
Механоэлектрические преобразователи преобразуют механические перемещения или угол поворота в электрический сигнал и по принципу действия могут быть контактными, реостатными, тензометрическими, индуктивными, емкостными, пьезоэлектрическими, фотоэлектрическими и т. д.
На рис. 3.16, г представлена принципиальная схема дискретного мембранно-контактного механоэлектрического преобразователя. Исходное механическое перемещение мембраны осуществляется под действием давления воздуха. В диэлектрическом корпусе 1 устанавливаются две легкие мембраны 2 и 3 так, что образуется камера А, к которой подводится давление р, и герметизированная камера Б, в которой устанавливается стандартная контактная группа 4 от реле типа РСМ.
Недостатками контактных преобразователей являются сравнительно низкая надежность и невозможность непрерывного преобразования контролируемой величины.
Стабильность и надежность работы контактных преобразователей определяются в основном материалом и конструкцией контактов.
Реостатные преобразователи выполняют непрерывное преобразование линейных или угловых перемещений в электрические величины. На рис. 3.16, е изображена схема потенциометрического (реостатного) преобразователя, нагруженного на сопротивление Rн.
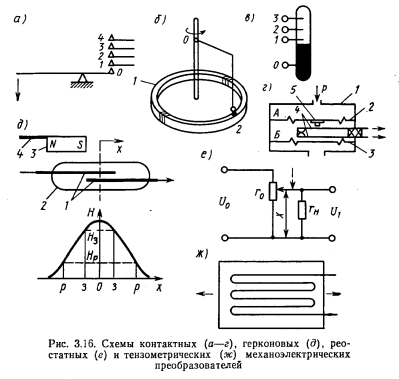
Индуктивные преобразователи, как правило, выполняются в виде дифференциальных устройств. На рис. 3.17, а изображена схема дифференциального индуктивного преобразователя с Ш-об-разными магнитными сердечниками.~~На рис. 3.17, б изображен трансформаторный индуктивный преобразователь, отличающийся от рассмотренного тем, что у него разделены цепь питания и выходная цепь.
24) Эквивалентные схемы электромеханических преобразователей с ЭМ связью.
Электромеханические преобразователи — это класс устройств, созданных для преобразования электрической энергии в механическую и наоборот. Также возможно преобразование электрической энергии в электрическую энергию другого рода.
Основные электромеханические преобразователи
Электрические машины - совершают однонаправленное непрерывное преобразование энергии. Все электрические машины являются обратимыми (могут быть как генераторами, так и двигателями).
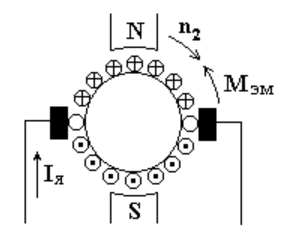
Рис. Электрическая машина постоянного тока.
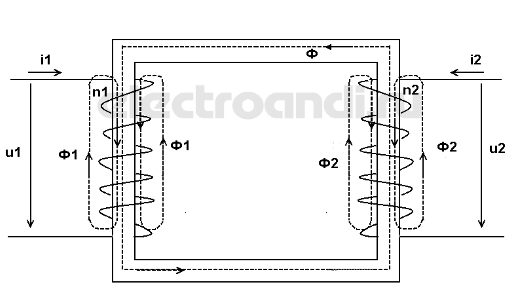
Трансформатором называется статическая электрическая машина, способная преобразовывать электрическую энергию из одного вида в другой, изменяя её основные параметры — напряжение, мощность, силу тока или частоту.
Основным параметром любого трансформатора является коэффициент трансформации — величина, равная отношению значений изменяемого параметра.
Синхронная машина — это такая электрическая машина переменного тока, в которой частота вращения ротора равна частоте изменения электромагнитного поля статора.
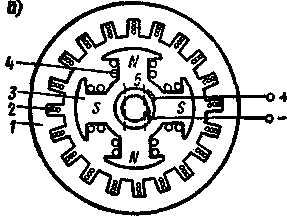
Рис. Синхронная машина с неподвижным якорем.
1 - якорь; 2 - обмотка якоря; 3 - полюсы индуктора; 4 - обмотка возбуждения;
Асинхронной машиной называют такую электрическую машину, в которой частота вращения ротора меньше частоты изменения электромагнитного поля статора. Эта разница называется скольжением.
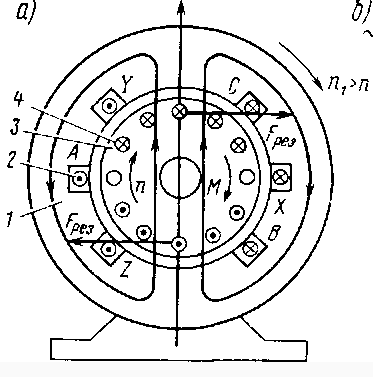
Рис. Асинхронный двигатель.
Состоит из неподвижной части статора 1, на котором расположены обмотка 2 статора, и вращающейся части — ротора 3 с обмоткой 4.
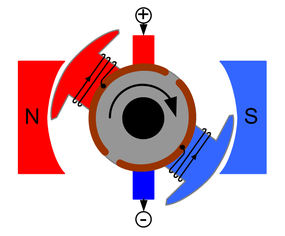
Машина постоянного тока — электрическая машина, преобразующая энергию в два этапа: электрическую энергию постоянного тока в электрическую энергию переменного тока и далее электрическую энергию переменного тока в механическую энергию на валу двигателя.
25) Поляризованный электромеханический преобразователь.
Использование: для дискретного электропривода. Сущность изобретения: на немагнитных платах установлен магнитопровод 2 с наконечниками 4. Магнит установлен на наконечниках, примыкающих к наконечникам 4 магнитопровода 2. При появлении тока в обмотке управления зубцы ротора поворачиваются на шаг П/6 , фиксируются в таком положении под током и остаются там же после окончания импульса тока. С появлением в обмотке импульса тока обратной полярности процесс повторяется.
Изобретение относится к приборостроению и может быть использовано для дискретного электропривода.
Целью изобретения является повышение технологичности при упрощении конструкции и расширение функциональных возможностей.
На немагнитных платах 1 установлен магнитопровод 2 с двумя сердечниками 3, имеющими наконечники 4 с угловой протяженностью П/9. Магнит 5 установлен на наконечниках 6, примыкающих к наконечникам 4. Две одинаковые секции 7 обмотки установлены на сердечника. 3. Вал 8 опирается на подпятник 9 и несет ротор 10 с шестью зубцами 11, имеющими угловую протяженность 2 П/9, разделенными пазами с протяженностью П/9. На зубцах 11 ротора 10 выполнен уступ 12 в пределах от 1/3 до 2/3 их высоты. Угловая протяженность зубцов ротора за уступом 12 П/9.
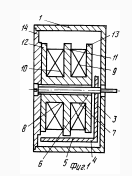
Преимуществом такого преобразователя является практическое совпадение точек фиксации при наличии и отсутствии тока в обмотке. Это повышает надежность и четкость отработки шагов. Технологичность обеспечивается уменьшением числа оригинальных составных частей при упрощении их конфигурации.
26) Поляризованный электростатический преобразователь.