
Трехфазные трансформаторы








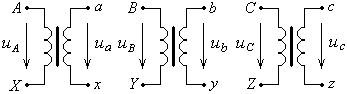 Рис. 1.10.
Рис. 1.10.
|
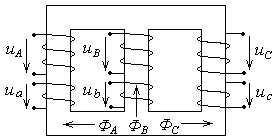 Рис. 1.11.
Рис. 1.11.
|
В трехфазных цепях можно применять отдельный однофазный трансформатор для каждой фазы (рис. 1.10). Это дает преимущества при транспортировке, монтаже, ремонте и обслуживании трансформаторов.
Однако, для всех трех фаз можно использовать один сердечник, разместив обмотки фаз на разных стержнях (рис. 1.11). Это дает экономию электротехнических материалов и обеспечивает компактность конструкции. Такой вариант применяется чаще.
Сумма магнитных потоков в узле магнитопровода должна быть равна нулю по первому закону Кирхгофа для магнитных цепей:  (рис. 1.11). Такое условие согласуется с симметрией напряжений трехфазной цепи, вследствие которой эта сумма потоков также равна нулю.
(рис. 1.11). Такое условие согласуется с симметрией напряжений трехфазной цепи, вследствие которой эта сумма потоков также равна нулю.
Начала первичных обмоток понижающих трехфазных трансформаторов обозначаются буквами A, B, C, а их концы – буквами X, Y, Z. Начала и концы вторичных обмоток обозначаются соответственно a, b, c и x, y, z (рис.1.10).
Обмотки трехфазных трансформаторов соединяются звездой или треугольником. Эти виды соединения обозначаются соответственно Y и D. Соединение звездой с выведенной нейтральной точкой обозначается YN. или Y0.
Сочетание соединения первичных и вторичных обмоток называется группой соединения. В обозначении группы соединения слева указывается способ соединения первичной обмотки, справа – вторичной. Например, запись Y/D означает, что первичные обмотки соединяются звездой, а вторичные – треугольником.
Группы соединения Y/Y и Y/YN отмечаются числом 12, сдвиг фаз первичных напряжений таких трансформаторов относительно вторичных равен нулю. Группа Y/D отмечается числом 11, сдвиг фаз первичных напряжений трансформаторов этой группы относительно вторичных равен 30о. В СССР (России) выпускаются трансформаторы трех групп соединения: Y/Y‑12, Y/YN-12 и Y/D-11.
Параллельная работа трансформаторов
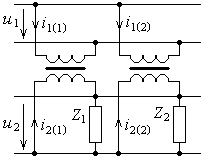 Рис. 1.12.
Рис. 1.12.
|
Для экономии проводов низковольтной сети, для сокращения потерь энергии в этих проводах, для повышения надежности электроснабжения, для облегчения ремонта и обслуживания трансформаторов применяют параллельное включение понижающих промышленных трансформаторов (рис. 1.12, здесь для простоты показаны однофазные трансформаторы). При этом должны соблюдаться три условия:
1. Они должны иметь одну и ту же группу соединения (все трансформаторы 11-ю или все 12-ю группу).
2. Они должны иметь одинаковые номинальные первичные и вторичные напряжения (разность не более 0,5 %).
3. Они должны иметь близкие напряжения короткого замыкания (разность не более 10%).
Первые два условия задают равенство ЭДС параллельных обмоток. Это обеспечивает отсутствие уравнительных токов в обмотках.
Третье условие обеспечивает пропорциональность токов трансформаторов их номинальным значениям, т.е загрузку трансформаторов пропорционально их мощности.
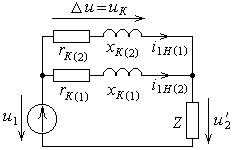 Рис. 1.13.
Рис. 1.13.
|
Третье условие можно пояснить так. Пусть один из параллельно включенных трансформаторов работает в номинальном режиме, т.е. его токи номинальные и потеря напряжения DU равна напряжению короткого замыкания UK. Если это напряжение короткого замыкания общее для всех параллельно включенных трансформаторов, то токи остальных трансформаторов также номинальные (это следует из определения напряжения короткого замыкания) (рис. 1.13). При снижении нагрузки токи будут уменьшаться, оставаясь пропорциональными своим номинальным значениям. Они будут пропорциональны также значениям номинальных мощностей трансформаторов.
Если же напряжения короткого замыкания не совпадают, то при номинальном режиме одного трансформатора другие будут недогружены или перегружены.
2. Трехфазные асинхронные электродвигатели
Эти двигатели очень широко применяются в народном хозяйстве. Их основные достоинства: они простые, надежные и дешевые, требуют минимального обслуживания. Двигатели с короткозамкнутым ротором не имеют подвижных контактов, связанного с ними искрения и износа.
Основные недостатки: сложность регулировки скорости, небольшой пусковой момент и небольшая перегрузочная способность.
Основная область применения: нерегулируемый привод переменного тока.
Асинхронные двигатели по конкретным особенностям устройства и назначения довольно разнообразны. Мы рассмотрим самые распространенные и типичные конструкции.
Устройство
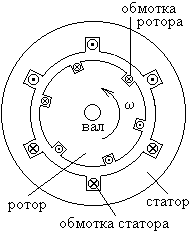 Рис. 2.1. Асинхронный
двигатель в разрезе
(схематический рисунок).
Рис. 2.1. Асинхронный
двигатель в разрезе
(схематический рисунок).
|
Асинхронный двигатель (АД) состоит из неподвижного статора и вращающегося внутри него ротора (рис. 2.1). Сердечники статора и ротора сделаны из электротехнической стали. Для подавления вихревых токов они собираются из отдельных листов.
Статор АД устроен так же, как и статор трехфазного генератора (см. п.17). Он имеет обмотку из медного провода, состоящую из трех частей (фаз). Выводы обмотки подключаются к источнику трехфазного напряжения.
Обмотка короткозамкнутого ротора представляет собой алюминиевую отливку. Ее стержни расположены в пазах магнитопровода и замыкаются накоротко кольцами на торцах ротора.
Обмотка фазного ротора сделана из медного провода. Она имеет три фазы, соединенные звездой. К свободным концам этой обмотки через контактные кольца и щетки подключаются пусковые реостаты (рис. 2.5).
Принцип действия
Если внутрь статора АД поместить вращающийся постоянный магнит, то на выводах обмоток статора появится трехфазное напряжение (п. 16). Этот процесс обратим: если на выводы обмоток подать трехфазное напряжение, то в полости статора появится вращающееся магнитное поле.
В рабочем режиме ротор вращается медленнее, чем магнитное поле статора (асинхронно, отсюда и название двигателя). Поэтому магнитное поле внутри ротора также вращается. По закону электромагнитной индукции в обмотке ротора вследствие изменения магнитного поля возникают вихревые токи. На проводники обмотки и на сердечник ротора по закону Ампера действует сила со стороны магнитного поля статора. Она и создает вращающий момент двигателя.
По существу, АД представляет собой специальный трансформатор, у которого часть сердечника и вторичная обмотка вращаются.
Частота вращения поля (синхронная частота)
|
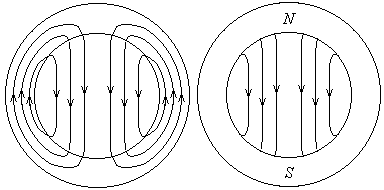
| Рис. 2.2. Магнитное поле статора при р = 1. |
|
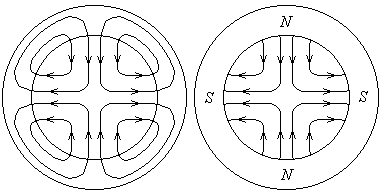
| Рис. 2.3. Магнитное поле статора при р = 2. |
В зависимости от конструкции статор создает магнитное поле разной конфигурации. Говорят, что статор имеет р пар полюсов. Смысл этого понятия виден лучше, если рассматривать поле только в полости статора (правые части рис. 2.2 и рис. 2.3).
Вдоль зазора между ротором и статором магнитное поле изменяется по синусоидальному закону. Так как оно вращается, то вдоль зазора бежит синусоидальная волна магнитного поля. Всякая волна за один период изменения во времени проходит расстояние, равное своей длине. При р = 1 периметр зазора равен длине волны поля, при р = 2 – удвоенной длине волны, и т.д. Поэтому при р = 1 поле делает один оборот за один период изменения во времени, при р = 2 – за два периода и т.д. Отсюда получаем формулу для частоты вращения магнитного поля двигателя  :
:
 (об/мин),
(об/мин),
где f – частота питающего напряжения (в Гц), р – число пар полюсов статора.
Частоту называют еще синхронной частотой. Из последней формулы следует, что при частоте питающего напряжения 50 Гц может принимать значения 3000, 1500, 1000, 750 об/мин. Более низкие синхронные частоты в принципе возможны, но используются редко.
Скольжение
Частоту вращения ротора обозначают буквой n и обычно измеряют в оборотах в минуту. Скольжением называют величину
 .
.
Скольжение позволяет единым образом рассчитывать характеристики двигателей с различными номинальными скоростями. Скольжение часто выражают в процентах. Типичные значения s для номинальных режимов двигателей составляют 5-10%.
То есть, синхронная и номинальная частоты отличаются на несколько процентов, и поэтому по значению номинальной частоты можно легко определить значение синхронной частоты, а затем и номинальное скольжение. Например, если номинальная частота вращения 1400 об/мин, то синхронная будет 1500 об/мин, а номинальное скольжение
 .
.
Механическая характеристика АД с короткозамкнутым ротором
Зависимость момента двигателя от скорости называется механической характеристикой. Ее типичный график показан на (рис. 2.4). На нем указаны номинальный, пусковой и критический (максимальный) моменты, а также номинальное и критическое скольжение.
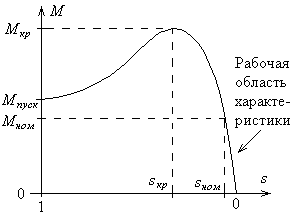 Рис. 2.4. Механическая характеристика
АД с короткозамкнутым ротором.
Рис. 2.4. Механическая характеристика
АД с короткозамкнутым ротором.
|
Механическая характеристика АД с короткозамкнутым ротором приближенно описывается уравнением
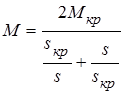 .
.
В пределах рабочего участка характеристики  можно использовать упрощенное уравнение
можно использовать упрощенное уравнение
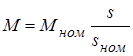 .
.
Механическая характеристика АД с фазным ротором
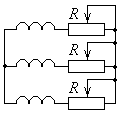 Рис. 2.5.
Рис. 2.5.
|
Если свободные выводы обмоток ротора соединены накоротко, то ротор получается короткозамкнутым. Механическая характеристика в этом случае называется естественной (рис. 2.4, рис. 2.6). Такое замыкание обмоток используется для работы двигателя в установившемся режиме.
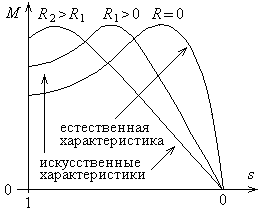 Рис. 2.6. Механическая характеристика
АД с фазным ротором.
Рис. 2.6. Механическая характеристика
АД с фазным ротором.
|
Для пуска двигателя к клеммам обмотки ротора подключаются пусковые реостаты (рис. 2.5.). Получающиеся при этом механические характеристики называются искусственными. Они позволяют увеличить пусковой момент двигателя.
Перед пуском реостаты полностью вводят, а по мере разгона двигателя их сопротивления уменьшают. Это обеспечивает переход с одной искусственной характеристики на другую и поддерживает момент двигателя близким к максимальному. Пусковые реостаты часто делают в виде набора резисторов со ступенчатым переключением.
Возможность увеличения пускового момента является преимуществом АД с фазным ротором по сравнению с АД с короткозамкнутым ротором. Недостатком является более сложная и более дорогая конструкция, износ и возможное искрение контактных колец и щеток, необходимость их обслуживания.
Подключение АД к сети
При подключении к сети обмотки статора соединяются звездой или треугольником в зависимости от величины линейного напряжения сети. Клеммы двигателя специально расположены так, чтобы их было удобно соединять (рис.2.7, 2.8). На клеммной панели отмечаются начала и концы обмоток.
Меньшему напряжению соответствует соединение треугольником, большему – звездой. Номинальные напряжения указываются в паспорте и на щитке двигателя. Например, надпись D/Y 220/380 B означает, что при линейном напряжении сети 220 В обмотки нужно соединить треугольником, а при напряжении 380 В – звездой.
В любом случае напряжение непосредственно на обмотках двигателя равно меньшему из двух значений, указанных в паспорте.
При работе двигателя с номинальной мощностью напряжение питания может отличаться от номинального не больше чем на 5%, иначе двигатель будет перегреваться.
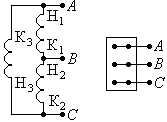 Рис. 2.7. Схема соединения обмоток статора треугольником и соответствующее соединение клемм двигателя.
Рис. 2.7. Схема соединения обмоток статора треугольником и соответствующее соединение клемм двигателя.
|
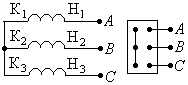 Рис. 2.8. Схема соединения обмоток статора звездой и соответствующее соединение клемм двигателя.
Рис. 2.8. Схема соединения обмоток статора звездой и соответствующее соединение клемм двигателя.
|
Если поменять местами любые две фазы питающего напряжения, двигатель изменит направление вращения.
Пуск АД
При пуске скорость вращения магнитного поля относительно ротора максимальна, поэтому в обмотке ротора текут большие токи. По мере разгона эта скорость уменьшается, поэтому уменьшаются также токи в обмотке ротора (токи вторичной обмотки) и уменьшается их размагничивающее действие. Как и у трансформатора, это приводит к уменьшению тока первичной обмотки, то есть обмотки статора. Поэтому номинальный ток АД меньше пускового.
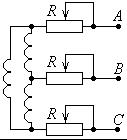 Рис. 2.9. Пусковые сопротивления в цепи статора при соединении обмоток треугольником.
Рис. 2.9. Пусковые сопротивления в цепи статора при соединении обмоток треугольником.
| 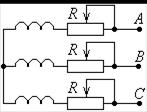 Рис. 2.10. Пусковые сопротивления в цепи статора при соединении обмоток звездой.
Рис. 2.10. Пусковые сопротивления в цепи статора при соединении обмоток звездой.
|
В отличие от обычного трансформатора, АД имеет воздушный зазор, который сильно ограничивает магнитную связь обмоток статора и ротора.
Поэтому ток холостого хода относительно большой (более половины номинального), а пусковой ток больше номинального всего в 5-7 раз (без зазора он превышал бы номинальный в десятки раз).
Для АД с короткозамкнутым ротором обычно применяют прямой пуск, то есть простое подключение к сети выключателем. Если двигатель или сеть не допускает перегрузку пусковым током, то его ограничивают активными или индуктивными сопротивлениями в цепи статора (рис. 2.9, рис. 2.10). Однако, это снижает пусковой момент. После разгона двигателя пусковые сопротивления уменьшают до нуля.
Если АД с короткозамкнутым ротором работает при соединении обмоток треугольником, то на время пуска его обмотки можно соединить звездой, а после разгона переключить в треугольник. Это снижает пусковой ток в  раз, но уменьшает пусковой момент в 3 раза.
раз, но уменьшает пусковой момент в 3 раза.
Пусковой ток двигателей с фазным ротором ограничивают с помощью пусковых реостатов в цепи ротора (рис. 2.5).