
Условие линейного разделения сигналов








Условие линейной независимости уравнений системы (1.2), определяющее возможность линейного разделения группового сигнала на индивидуальные, означает, что столбцы матрицы Е, соответствующей определителю Δ , линейно независимы. Это же относится и к строкам. Условие линейной независимости столбцов соблюдается только тогда, когда тождество
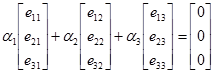 , ,
| (1.3) |
что имеет место лишь при условии  . Если тождество выполняется хотя бы при одном
. Если тождество выполняется хотя бы при одном  , то система линейных уравнений (1.2) будет линейно зависимой, а следовательно, из группового сигнала {S1, S2, S3} нельзя выделить первичные сигналы а1, а2, а3.
, то система линейных уравнений (1.2) будет линейно зависимой, а следовательно, из группового сигнала {S1, S2, S3} нельзя выделить первичные сигналы а1, а2, а3.
В курсе линейной алгебры одностолбцовые матрицы принято называть векторами. Поэтому тождество (1.3) целесообразно переписать в виде

| (1.4) |
где  -векторы
-векторы
При выявлении связи между  следует составить определитель Грамс:
следует составить определитель Грамс:
 , где
, где  ,
,  -скалярное произведение векторов
-скалярное произведение векторов  и ; Т – означает знак транспонирования матрицы.
и ; Т – означает знак транспонирования матрицы.
Транспонирование матрицы означает поворот ее относительно главной диагонали, а транспонирование вектора-столбца переводит в его вектор-строку. Например, если
 , то
, то  .
.
Если определитель Грама положителен, то векторы  линейно независимы. Если же G=0, то векторы будут линейно независимы.
линейно независимы. Если же G=0, то векторы будут линейно независимы.
Максимальное число линейно разделимых сигналов в N – мерном линейном пространстве
Размерность линейного векторного пространства определяется числом координат используемых векторов. Путь заданы, N линейно независимых векторов в N – мерном линейном пространстве. Тогда на основании (1.4) для этих векторов справедливо соотношение
 . .
| (1.5) |
Возьмем еще один вектор  в том же N - мерном пространстве. Добавив его в уравнение (1.5), получим
в том же N - мерном пространстве. Добавив его в уравнение (1.5), получим

Это уравнение перепишем в виде

Где  - матрица, составленная из линейно независимых векторов,
- матрица, составленная из линейно независимых векторов,  - вектор коэффициентов
- вектор коэффициентов  .
.
Из этого уравнения находим, что  или
или
 .
.
Матрица Е не особенная, поскольку ее столбцы линейно независимы. Тогда если только не нулевой вектор, то и  не нулевой вектор. Поэтому вектор является линейной комбинацией векторов
не нулевой вектор. Поэтому вектор является линейной комбинацией векторов  . Следовательно, в N- мерном пространстве может быть лишь N линейно независимых сигналов
. Следовательно, в N- мерном пространстве может быть лишь N линейно независимых сигналов
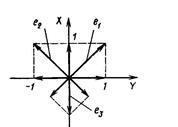
Рис.1.6 - К определению максимального числа линейно независимых сигналов
Например. Пусть будут заданы два вектора  ;
;  . Возьмем третий вектор, например
. Возьмем третий вектор, например  . Составим уравнение
. Составим уравнение  . Решая это уравнение относительно
. Решая это уравнение относительно  ,
,  определяем, что
определяем, что  . Таким образом,
. Таким образом,  линейно связан с
линейно связан с  и
и  .
.
Поскольку векторы и представлены в двухмерном пространстве, т.е. на плоскости, то этот пример может быть легко решен геометрически. На рисунке 1.6 показаны векторы и ; вектор определяется геометрической суммой векторов и .