
Федеральное государственное автономное образовательное








МИНОБРНАУКИ РОССИИ
Федеральное государственное автономное образовательное
учреждение высшего образования
«ЮЖНЫЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ»
ИНСТИТУТ РАДИОТЕХНИЧЕСКИХ СИСТЕМ И УПРАВЛЕНИЯ
КАФЕДРА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ


Отчет
по лабораторной работе № 1
«Аналитический синтез линейных систем автоматического управления»
по курсу:
«Теория автоматического управления»
Выполнили:
Студенты группы РТбо3-7
Кошкальда Я.Ю.
Гладышев Д.А.
Проверил:
Ассистент каф. САУ
Денисенко Д. Ю.
__________________
Таганрог 2017 г.
Цель работы.
Изучение аналитических методов синтеза линейных автоматических систем по заданным показателям качества.
Выполнение работы.
| Тип устройства управления | двумерное | ||||||
| Вар. | 
| 
| 
| 
| 
| 
| 
|
| 2 | 0 | 3 | 1,3 | 1,0 | 1 | нет | 1 |
1. Найдем передаточную функцию и уравнения объекта в переменных состояния.
Уравнения управляемого объекта в переменных состояния имеют вид:

В соответствии с вариантом задания передаточная функция  объекта (1) определяется выражением:
объекта (1) определяется выражением:

Подставив данные из варианта, получим:

тогда уравнения объекта (1) в канонической управляемой форме имеют вид:

2. Для заданного объекта в соответствии с вариантом и типом УУ найдем коэффициенты уравнений в переменных состояния двумерного устройства управления так, чтобы замкнутая система имела заданные показатели качества.
Уравнения в переменных состояния устройства управления (УУ) с относительной степенью  ищутся такими, чтобы система управления объектом (1) обладала астатизмом порядка
ищутся такими, чтобы система управления объектом (1) обладала астатизмом порядка  к задающему воздействию
к задающему воздействию  . При этом время регулирования по задающему воздействию должно быть не более
. При этом время регулирования по задающему воздействию должно быть не более  , а перерегулирование равное
, а перерегулирование равное  . Измеряются отклонение
. Измеряются отклонение  и управляемая переменная y.
и управляемая переменная y.
Найдем уравнение «вход-выход» объекта согласно (2):

где характеристический полином  , полином
, полином  .
.
Для обеспечения астатизма порядка  по задающему воздействию, необходимо, чтобы в разомкнутой цепи системы управления было
по задающему воздействию, необходимо, чтобы в разомкнутой цепи системы управления было  интеграторов. Так как характеристический полином
интеграторов. Так как характеристический полином  , где
, где  ,
,  , так как
, так как  всегда меньше
всегда меньше  то в двумерном устройстве управления необходимо ввести
то в двумерном устройстве управления необходимо ввести  интегратор.
интегратор.
Положим характеристический полином замкнутой системы

Гурвицевый полином, выбираемый по условиям качества синтезируемой системы равен

где  ,
,  ,
,  ,
,  ,
,
Уравнение «вход-выход» искомого устройства управления

где R ( p ), L ( p ), Q ( p ) – полиномы, подлежащие определению в процессе синтеза.
Уравнение «вход-выход» искомого ДУУ:

Зададимся относительной степенью устройства управления  .
.
Для того чтобы найти полиномы  рассчитаем коэффициенты:
рассчитаем коэффициенты:



где 
В результате расчета получили:  .
.
Для заданного варианта коэффициенты стандартных передаточных функций приведены в таблице:
| Порядок аста-тизма, | Степень знаменателя, | Коэффициенты | Перерегули-рование, | Время регулирования, | |||||

| 
| 
| 
| 
|
| ||||
| 1 | 2 | 1 | 2 | 1 | нет | 4,75 | |||




Вычислим временной масштабный коэффициент  , а затем желаемые коэффициенты полинома
, а затем желаемые коэффициенты полинома  по формуле
по формуле  :
:



Запишем соответствующую уравнению (5) систему следующего вида:
Тогда, составленная указанным способом система, соответствующая уравнению (5), имеет следующий вид:
Решая данную систему, получим значения коэффициентов полиномов  :
:

Запишем полиномы  :
:





Таким образом, найдены все полиномы устройства управления, и по (7) можно записать уравнение «вход-выход» искомого устройства управления:

Уравнение устройства управления можно записать в следующем виде:

где передаточная функция устройства управления 

3. Составим схему для моделирования и исследования синтезированной САУ в пакете Simulink
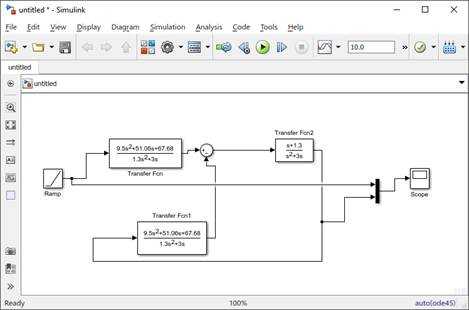
Рис. 1 Схема модели синтезированной САУ в Simulink
Где представлены передаточная функция объекта и передаточная функция  устройства управления и сравнивающий элемент.
устройства управления и сравнивающий элемент.
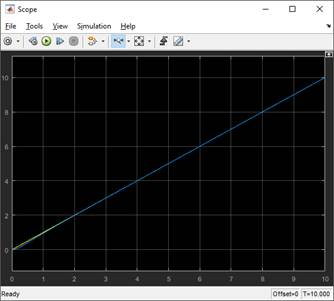
Рис. 2
На рисунке 2 показан график реакции системы на линейное воздействие g ( t )= t , полученный с помощью MATLAB. Из графика видно, что синтезированная система принимает установившееся значение за время регулирования  , перерегулирование равным 0%.
, перерегулирование равным 0%.
Вывод:
В результате выполнения лабораторной работы была синтезирована и исследована система управления объектом по заданным показателям качества.
В ходе лабораторной работы были получены уравнения в переменных состояния устройства управления, передаточная функция и характеристический полином синтезированной системы.
Так же мы узнали, что перерегулирование это ограниченный по времени выброс сигнала или функции над целевым значением. Чаще всего рассматривается в качестве динамической характеристики динамической системы.
Порядок астатизма по тому или иному воздействию определяется количеством интегрирующих звеньев в цепи обратной связи между интересующим воздействием и ошибкой управления.
Таким образом, астатизм САУ по управляющему воздействию равен 1 (одно интегрирующее звено в цепи обратной связи - между ошибкой е(t) и управляющим воздействием g(t)).
По полученному графику переходного процесса синтезированной системы видно, что система принимает установившееся значение за время регулирования  , перерегулирование равным 0%, система управления объектом обладает астатизмом порядка к задающему воздействию g, следовательно, синтезированная система имеет требуемые показатели качества.
, перерегулирование равным 0%, система управления объектом обладает астатизмом порядка к задающему воздействию g, следовательно, синтезированная система имеет требуемые показатели качества.