
Робот - манипулятор








Манипуляторы — один из видов промышленных роботов, которые могут перемещать предметы с одного заданного места на другое. Для более точного и безопасного захвата и установки предметов различной формы, веса и уровня хрупкости можно использовать разные виды захватов.
Манипуляционный робот – автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Сам манипулятор - это механизм для изменения пространственного положения объектов. Значение слова «манипулятор» закрепилось за словом с середины XX века, благодаря применению сложных механизмов для работы с опасными объектами в атомной промышленности.
1. История создания и использования робота-манипулятора
Идея создания роботов - механических устройств, своим внешним видом и действиями подобных людям или каким-либо живым существам, увлекала человечество с незапамятных времен. Архимед построил множество невероятных в то время приспособлений самым эффективными из которых стала "Лапа Архимеда"- уникальная подъемная машина и прообраз современного крана и манипулятора. Она была очень похожа на рычаг, выступающий за городскую стену, оснащенный противовесом. Этот манипулятор, под управлением обученного машиниста, захватывал нос пристающего к берегу корабля и переворачивал его.
 | |||
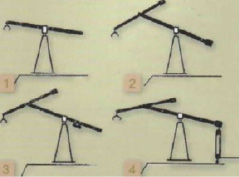 | |||
Рис. 1. «Лапа Архимеда»
2. Составляющие манипулятора
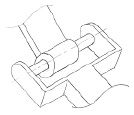
Манипулятор состоит из звеньев – несгибаемых частей, соединенных между собой шарнирами. Шарниры – части, соединяющие между собой звенья манипулятора, обеспечивая им возможность вращательного или линейное движение. Различают несколько видов шарниров: цилиндрический, шаровой и шарнир угловых осей (см. рис. 2).
Разные виды шарниров позволяют производить разные виды движения:
• цилиндрический – вокруг общей оси;
• шаровой – вокруг общей точки;
• угловых осей – с равной угловой скоростью.
 | |||||
 | |||||
 | |||||
а) б) в)
Рис. 2. а – цилиндрический шарнир; б – сферический шарнир; в – шарнир угловых осей
 | |||
 | |||
а) б)
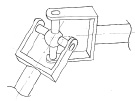
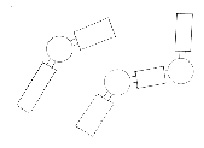
Рис. 3. а – пример разомкнутой и замкнутой кинематических пар; б – замкнутые кинематические пары нашего манипулятора
Шарнир также является примером кинематической пары в манипуляторе.
Кинематические пары – это два соединенных между собой звена, допускающие какое-либо относительное перемещение. Кинематические пары образуют кинематические цепи, которые бывают замкнутыми и разомкнутыми (рис.2). Замкнутой цепью называют ту, все звенья которой входят в состав как минимум двух кинематических пар. Кинематическая цепь, в которой есть звенья, входящие лишь в одну пару, называется разомкнутой [2].
Однако, вне зависимости от вида кинематической цепи, ее замыкает одно условное неподвижное звено. Один его конец неподвижно крепится к основанию робота, а его вторая половина соединена со следующим звеном, от которого идет еще одно, и так продолжается до самого «рабочего органа» манипулятора – его ключевой части.
3. Рабочий орган манипулятора
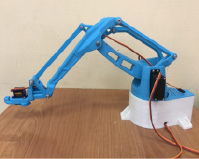
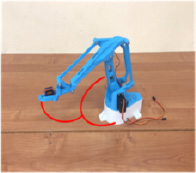
Рабочий орган – это исполнительная система манипулятора, предназначенная для выполнения различных действий. Она может представлять собой сверло, схват, фрезу, что угодно, в зависимости от целевого назначения робота. В нашем проекте – это схват, который сжимается, захватывая предмет, поворачиваясь, переносит его на другое место и разжимается (рис. 4).
 |  | ||
Рис. 4. Пример работы нашего манипулятора
4. Рабочая зона манипулятора
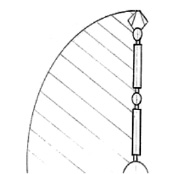
У большинства оно предполагает изменение положения, но каждый робот имеет границы, предел возможностей. Это своеобразный контур, за пределами которого он не сможет работать, так как попросту туда не дотягивается. Пространство, находящееся внутри этого контура, называется рабочей зоной манипулятора [3]. На рис. 5 это заштрихованная область, а линия, ограничивающая ее – траектория движения рабочего органа, когда угол между всеми звеньями равен 180°.
 | |||
 | |||
а б
Рис 5. а – схема рабочей области; б – схема рабочей области манипулятора
5. Приводы
Но никакой рабочей зоны не было бы и в помине, не будь манипулятор подвижен. Движение роботу обеспечивают специальные приводы, расположенные внутри него или, иногда, на поверхности. Базовый состав привода – двигатель и устройство управления данным приводом. Главное качество частей привода – легкость. В движение исполнительную часть и звенья приводят двигатели. Их может быть несколько и расположены они в разных местах, так как расположение двигателя определяется рациональностью его нахождения в данной части робота. Различают пневматические, гидравлические и электрические приводы. Они различаются мощностью и стоимостью, зависящей от сложности рабочего принципа.
6. Грузоподъемность
Однако, вне зависимости от подвижности манипулятора, каждый из них обладает своей грузоподъемностью, которая не менее, а в некоторых областях более важна при конструкции робота. Грузоподъемность показывает, насколько тяжелым грузом сможет оперировать робот, при этом не подвергая себя и манипулятор каким-либо механическим повреждениям и неполадкам. Этот параметр задается при создании робота и зависит от его размера, строения и предназначения.