
3. Боковая балансировка вертолета Ми-8 осуществляется с помощью отклонений РЦШ и педалей.








ВВЕДЕНИЕ
В разделах практической аэродинамики вертолета важное место отводится динамике полета, изучающей особенности балансировки, устойчивости и управляемости вертолета, а также закономерности движения центра масс под влиянием внешних сил.
Поведение вертолета в полете подчиняется основным законам движения и поэтому может быть изучено на основе положении механики тела, находящегося под действием совокупности сил и моментов. Положение центра масс на вертолете (центровка) влияет ни соотношение моментов внешних сил, поэтому необходимо знать ограничения по центровке, установленные Руководством по летной эксплуатации вертолета Ми-8.
Одной из задач динамики полете вертолета является определение запасов устойчивости и управляемости на данном режиме полета. Для изучения этих вопросов рассматриваются схемы взаимодействия сил и моментов, уравнения их равновесия, а также балансировочные кривые вертолете Ми-8,
Вопроса балансировки, устойчивости и управляемости вертолета взаимосвязаны, однако для их изучения используются различные методы анализа. Для анализа балансировки вертолета необходимо знать направление сил и моментов, действующих в связанной системе координат, условия их равновесия, причины нарушения в полете и способы уравновешивания с помощью рычагов управления. Используя балансировочные кривые, можно оценить запасом управления вертолетом на данном режиме полета.
При изучении вопросов устойчивости рассматривается реакция вертолета на внешнее возмущение, физическая картина возникновение восстанавливающих моментов со стороны несущего и рулевого винтов, фюзеляжа, стабилизатора, киля. Используя данные летных испытаний, необходимо знать характер возмущенного движения вертолета Ми-8 по крену, тангажу, курсу без автопилота и с включенным автопилотом. От степени устойчивости вертолета зависит характер управляющих воздействий пилота и расходы органов управления в зависимости от режима полета.
Для сравнительной оценки управляемости вертолета используется ряд показателей. Пользуясь этими показателями, можно сделать вывод о летных возможностях вертолете Ми-8, при этом увязать их с практическими рекомендациями и летными ограничениями. Руководство по летной эксплуатаций  (РЛЭ).
(РЛЭ).
Вопросы балансировки, устойчивости и управляемости вертолетов одновинтовой схемы достаточно подробно освещены в специальное литере ту ре, однако для слушателей по переучиванию представляют определенную сложность. Поэтому возникла необходимость в дополнительных рекомендациях, как более эффективно использовать учебную литературу по разделу "Динамика полета".
Целью настоящих методических указаний является:
- выявить наиболее трудноусваиваемые вопросы темы и проанализировать их;
- дать методические рекомендаций по изучения вопросов равновесия, балансировки и устойчивости вертолете Ми-8.
I. РАВНОВЕСИЕ И БАЛАНСИРОВКА ВЕРТОЛЕТА
I.I. Общие положения и рекомендации
Режимы полета характеризуются такими параметрами, как скорость, высота, мощность силовой установки и условно подразделяются на установившиеся и неустановившиеся.
Признаком установившегося режима является равномерное и прямолинейное движение вертолета, при этом значение и направление скорости с течением времени остаются неизменными. К установившимся режимам относятся: горизонтальный полет вертолета, набор и снижение с постоянным углом наклона траектории, планирование на режиме самовращения НВ, правильный вираж.
Признаком неустановившегося режима является непрерывное изменение скорости и углового положения вертолета, исправление траектории центра масс. К этой группе режимов относятся: взлет, посадка, маневрирование, переходные участки полета.
Длительный полет по маршруту, как правило, являются установившийся. Они отличаются экономичностью и более простой техникой пилотирования. Основным условием выполнения установившихся режимов полета является соблюдение полного равновесия сил и моментов, действующих не вертолет.
Равновесием принято называть такое состояние вертолета, при котором сохраняется прямолинейное и равномерное движение центра масс, а моменты внешних сил не вызывают вращения вертолета относительно связанных осей. Пилот добивается равновесия вертолета на заданном режиме путем отклонения органов управления в балансировочное положение.
Под балансировкой понимается потребное отклонение органов управления, при котором выполняются все условия равновесия вертолета в установившемся движении с постоянной скоростью.
При изучении вопросов равновесия и балансировки вертолета Ми-8 рекомендуется знать:
- какие силы и моменты действуют на вертолет в полете;
- каковы должны быть условия продольной, поперечной и путевой балансировки;
- под влиянием каких факторов может быть нарушено равновесие вертолета;
- какое влияние на движение вертолета и его балансировку оказывает центровка;
- какими способами осуществляется балансировка вертолета Ми-8 в полете;
- как пользоваться связанной системой координат;
- как составлять уравнение равновесия вертолета относительно осей 0x, 0y,0z;
- как с помощью балансировочных кривых вертолета Ми-8 определять потребные отклонения органов управления, а также запасы управления на различных установившихся режимах полета;
- на каких режимах полета запасы управления минимальны, какие ограничения установлены РЛЭ вертолета Ми-8.
1.1.1. Связанная система координат
Для анализа движения вертолета используется так называемая связанная система координат, состоящая из трех взаимно перпендикулярных осей, жестко связанных с вертолетом. Начало координат выбрано в центре масс вертолета. Зная направление осей, можно определить силы, действующие в продольной, поперечной и азимутальной плоскости, а также моменты этих сил. Взаимное расположение координатных
систем, направления осей, углов и моментов показано на рис 1.
|
Рис.1 Системы координат 1 |
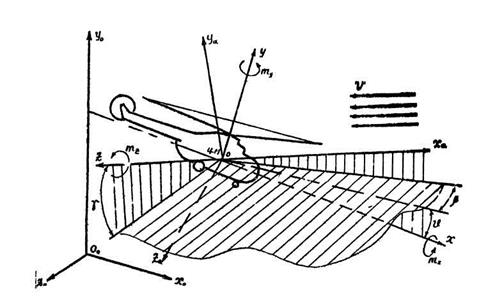
В соответствии с ГОСТ 22499-77 "Аппараты винтокрылые, механика полета в атмосфере" приняты следующие обозначения:
Ох - продольная ось вертолета, проходит параллельно строительной оси фюзеляжа, лежит в плоскости симметрии и направлена вперед к носу вертолета;
Оу - нормальная ось вертолета, лежит в его плоскости симметрии и направлена перпендикулярно оси Ох в сторону несущего винта;
Оz - поперечная ось, направлена перпендикулярно плоскости симметрии вертолета в сторону его правого борта.
Оси связанной системы координат и образуемые ими плоскости являются базовыми при установке приборов, фиксирующих угловое положение вертолета по отношению к земле, - авиагоризонта, компаса и других. Пространственное положение вертолета относительно связанных осей характеризуется углами тангажа, крене и рыскания.
Угол тангажа U - угол между продольной осью Ох и местной горизонтальной плоскостью; положителен, если продольная ось проходит выше горизонтальной плоскости. Угол крена γ - угол между нормальной осью Оу и вертикальной плоскостью, проходящей через ось Ох; положителен при правом крене. Угол рыскания ψ - угол между проекцией продольной оси Ох на местную горизонтальную плоскость и курсом полета; положителен при повороте вертолета влево.
Изменение углов тангажа и крене пилот оценивает по положению остекления кабины относительно линии видимого горизонта или по показаниям авиагоризонта, Изменение угла рыскания определяется по показаниям курсовых приборов.
На вертолет действуют следующие моменты:
Mz - продольный момент. Вызывает вращение вертолета относительно поперечной оси Oz . Приводит к изменению угла тангажа. Положительные моменты называются кабрирующими, а отрицательные - пикирующими;
Мх - поперечный момент. Вызывает вращение вертолета относительно продольной оси Ох. Приводит к изменению угла крена. Является положительным при крене вправо и отрицательным при крене влево;
Му- путевой момент (момент рыскания). Вызывает вращение вертолета относительно оси Оу. Приводит к изменению угла рыскания. Является положительным при развороте вертолета влево и отрицательный при развороте вправо.
Ввиду того, что начало связанной системы координат располагается в центре масс, большое влияние на балансировку, устойчивость и управляемость оказывает центровка. Поэтому необходимо уяснить следующие вопросы:
- что понимаемся под центровкой;
- виды центровки, причины изменения центровки;
- влияние центровки на состояние равновесия вертолета;
- почему установлены пределы центровки;
- методы расчета в проверки центровки на вертолете.
Вывод. Знание принятых обозначений и системы отсчета необходимо для того, чтобы с помощью соответствующих схем и графиков понять особенности движения вертолета и управления им в продольной, поперечной и азимутальной плоскостях.
I.I.2. Центровка вертолете
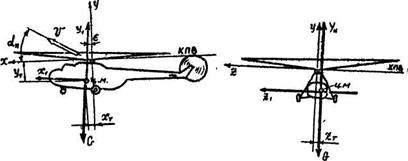
Под центровкой вертолета понимается расстояние от его центра масс до оси и плоскости вращения НВ.
Центровка вертолета представляется в виде трех координат Хт, Ут, Zт (рис.2) и рассчитывается в единицах длины (м, мм): Хт- продольная центровка - расстояние от центра масс вертолета до оси вала НВ. Если центр масс расположен впереди оси вала НВ, центровка считается положительной, если позади оси вала НВ - отрицательной;
Ут - вертикальная центровка - расстояние от центра масс вертолета до плоскости вращения НВ; Zт - боковая центровка - расстояние от центра масс вертолета до продольной плоскости вертолета, проходящей черев ось вала НВ.
|
Рис.2 Центровка вертолета |
Не величину центровки оказывают влияние: размещение загрузки, оборудование, компоновка вертолета, заправка топливом и ряд других эксплуатационных факторов. При этом степень их влияния на смешение центра масс неодинакова. Наибольшее изменение при эксплуатации вертолета имеет продольная центровка Хт . Вертикальная центровка может изменяться при размещении части груза на внешней подвеске, а боковая центровка - при несимметричном размещении грузов в кабине.
Смещение центра масс вертолета вызывает изменение моментов, действующих на вертолет. Следовательно, нарушается его равновесие в полете, возникает необходимость балансировки с помощью органов управления. При значительных изменениях центровки возможна нехватка запасов управления - вертолет будет неуправляемым. По этой причине необходимо выдерживать допустимый диапазон эксплуатационных центровок.
Для вертолета Ми-8 установлен диапазон продольных центровок +370...-80 мм. Это означает, что при расположении центра масс вертолета на расстоянии более 370 мм впереди оси НB отсутствует необходимый запас на отклонение ручки циклического шага (РЦШ) "не себя" на режиме висения. При расположении центра масс на расстоянии более 80 мм позади оси НВ исчезает запас на отклонение РЦШ "от себя" в полете на максимальной скорости.
На вертикальную и боковую центровку пределы не установлены, однако необходимо учитывать, что эти виды центровки влияют на чувствительность и эффективность управления. Так, при транспортировке груза на внешней подвеске центр масс системы вертолет-груз смещается вниз. Вследствие этого увеличиваются продольные и поперечные моменты от полной аэродинамической силы несущего винта Rн. При одинаковых завалах конуса вращения НВ плечо полной аэродинамической силы Rн становится тем больше, чем ниже расположен центр масс вертолета. Повышается чувствительность управления, пилотирования вертолета усложняется, особенно на переходных режимах полета.
В целях обеспечения безопасности полета экипаж обязан контролировать размещение груза в кабине и его надежное крепление. Перед вылетом необходимо производить расчет центровки вертолета с помощью центровочного графика. В случае необходимости центровка определяется методом простого расчета по формуле:
Хт =  ,
,
где  - сумма статических моментов от масс пустого вертолета, постоянного и переменного оборудования и грузов относительно оси вала НВ; - сумма масс грузов, входящих в состав вертолета.
- сумма статических моментов от масс пустого вертолета, постоянного и переменного оборудования и грузов относительно оси вала НВ; - сумма масс грузов, входящих в состав вертолета.
Окончательно продольная и поперечная центровки проверяются на режиме висения по положению ручки циклического шага в продольном и поперечном направлениях.
Вывод. Соблюдение установленного диапазона центровок гарантирует возможность безопасного пилотирования на всех режимах полета, в том числе в условиях турбулентной атмосферы, что подтверждено летными испытаниями и практикой летной эксплуатация.
I.I.3. Условия равновесия
Согласно второму закону механики вертолет, как любое другое тело, движется прямолинейно и равномерно, если равнодействующая всех действующих нa него внешних сил равна нулю. Следовательно, необходимым условием установившегося полета вертолета является равновесие внешних сил:  = 0, где Fi- вектор какой-либо силы.
= 0, где Fi- вектор какой-либо силы.
Однако внешние силы, за исключением силы тяжести, как правило, не проходят через центр масс. Следовательно, они создают моменты относительно центра масс, стремящиеся развернуть вертолет в пространстве.
Аэродинамические силы и их направление зависят ориентации вертолета относительно направления его движения. Следовательно, при неизменной скорости набегающего потока равновесие сил сохраняется лишь в том случае, если вертолет не поворачивается относительно воздушного потока. Для этого к условию равновесия сил необходимо добавить уравнение равновесия моментов:  , где Mi– вектор момента силы Fi относительно центра масс.
, где Mi– вектор момента силы Fi относительно центра масс.
Выводы.
1. Условием полного равновесия вертолета является равенство нулю алгебраической суммы внешних сил и их моментов относительно центра масс.
2. Полного равновесия пилот добивается путем балансировки вертолета, в процессе которой изменяется тяга несущего и рулевого винтов.
Балансировка вертолета рассматривается относительно осей Ох, Оу , Oz и соответственно подразделяется на продольную, поперечную и путевую. Поперечная и путевая балансировки объединяются общим понятием боковая балансировка.
1.2. Продольная балансировка
Целью продольной балансировки является выдерживание пилотом заданного угла тангажа и поступательной скорости вертолета. Вертолет считается сбалансированным, если он находится в состоянии равновесия под действием сил и моментов, действующих в продольной плоскости, перпендикулярной поперечной оси Oz .
На вертолет Ми-8 в полете действуют следующие продольные моменты (рис.3):
- момент несущего винта Мzн = Rн·Хтэф - эффективная центровка вертолета, представляющая собой расстояние между вектором полной аэродинамической силы НВ Rн и центром масс вертолета;
- инерционный момент на втулке за счет разноса горизонтальных шарниров (ГШ) Mzr.
Суммарный момент от НВ и разноса ГШ является пикирующим на моторном режиме полета и кабрирующим на режиме самовращения НВ. Он зависит от центровки и балансировочного наклона конуса вращения НВ;
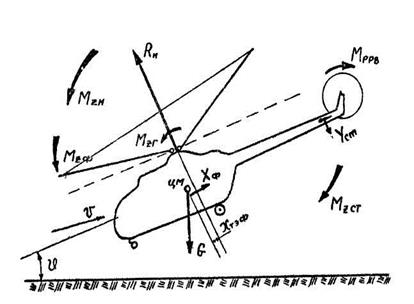
Рис. 3. Продольная балансировка вертолета.
- момент рулевого винта Mzр. Представляет собой реактивный момент РВ. Является кабрирующим на всех режимах полета и зависит oт углов установки лопастей РВ;
- момент фюзеляжа Mzф. Возникает за счет обдувки фюзеляжа встречным и индукционным потоками. Суммарный момент фюзеляжа является кабрирующим на малых скоростях полета и при самовращении НВ, а на режимах моторного полета - пикирующий;
- момент стабилизатора Mzст. На режимах полета с работающими двигателями является кабрирующим, так как при отрицательном угле установки подъемная сила стабилизатор Уст направлена вниз. На режиме самовращения НВ момент Мст является пикирующий.
Условием продольного равновесия вертолета является равенство нулю алгебраической суммы продольных моментов, действующих относительно поперечной оси 0z:
 = -Mzн – Mzr
= -Mzн – Mzr  Mzф Mzст + Mzр =0. (I)
Mzф Mzст + Mzр =0. (I)
Из яревневия (I) следует, что вертолет находится в состоянии продольного равновесия при определенном значении момента от несущего винта Mzн. При изменении моментов Mzн и Mzr равновесие нарушается, и вертолет переходит на новый режим полета. Следовательно, для балансировки вертолета пилот должен с помощью РЦШ изменить
наклон конуcа вращения НB. При этом изменяется направление полной аэродинамической силы НВ Rн, эффективная центровка Хтэф, а значит и продольный момент от НВ.
В установившемся полете пилот стремится выдержать прямолинейное и равномерное движение вертолета, для чего РЦШ удерживается в балансировочном положении и незначительно отклоняется лишь для парирования возмущений.
Отклонение конуса вращения НВ кинематически связано с органами управления - кольцом автомата перекоса и РЦШ и зависит от следующих факторов: скорости полета, центровки, режима работы двигателей.
На рис. 4 приведены балансировочные кривые вертолета Ми-8. Они представляют собой графические зависимости углов отклонения кольца автомата перекоса (АП) в продольной отношении Xº от скорости полета. Кривые построены расчетным путем для различных вариантов центровок, при постоянном положении рычага "шаг-газ" (мощности двигателей).
|
|
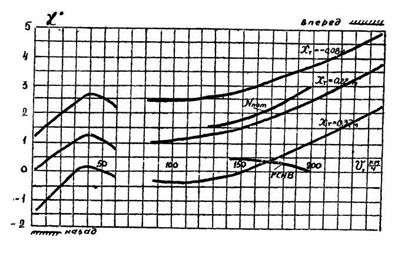
Рис.4 Балансировочные кривые продольных
отклонений кольца АП от скорости по прибору
При увеличении скорости полета балансировочное отклонение Х.° кольца АП вперед возрастает. Это объясняется тем, что чем больше поступательная скорость вертолета, тем сильнее естественный завал конуса вращения НВ назад, при котором преобладают кабрирующие моменты. Следовательно для сохранения продольного равновесия пилот должен отклонить РЦШ "от себя".
В диапазоне скоростей 30...80 км/ч балансировочные кривые имеют обратный наклон. Это свидетельствует о том, что вертолет Ми-8 на этом участке полета имеет статическую неустойчивость по с корости (устойчивость будет рассмотрена в разделе 2). Поэтому для разгона скорости пилот должен первоначально отклонить РЦШ «от себя», а затем зафиксировать в положении "на себя", т.е. выполнять двойные движения.
При более задней центровке вертолете балансировочная кривая смещается вверх т.е. кольцо АП должно занимать белее переднее положение. Это вызвано тем, что момент от полной аэродинамической силы НВ RH изменяется на кабрирование. Наоборот, при более передней центровке момент силы RH изменяется на пикирование. Кольцо АП должно занимать более заднее балансировочное положение - кривая смещается вниз.
При увеличении массы вертолета, высоты полете, температуры наружного воздуха полет выполняется на повышенных режимах работы двигателей и шаге НВ. Условия продольной балансировки на данной скорости изменяются.
Вследствие дополнительного скоса потока на стабилизаторе, а также увеличения реактивного момента рулевого винта Mzр возрастает кабрирующий момент. Следовательно, по сравнению с пониженными режимами, кольцо АП должно занимать более переднее положение.
На режиме самовращения НВ вертолет балансируется при заднем положении кольца автомата перекоса и РЦШ, так как вследствие большой вертикальной скорости снижения стабилизатор создает пикирующий момент.
На режиме висения, особенно при предельно-передней центровке +370 мм, несущий винт создает наибольший пикирующий момент. Поэтому РЦШ должна занимать положение "на себя",а кольцо автомата перекоса иметь наибольший наклон назад. При движении вертолета назад или при попутном ветре "расход" отклонения РЦШ "на себя" должен быть еще больше. В полете на максимальной скорости, особенно при предельно-задней центровке, "сдув" конуса вращения НВ назад наибольший, РЦШ и кольцо АП должны занимать наиболее переднее положение.
Рассматривая балансировочные кривые вертолета Ми-8, можно убедиться в том, что запасы продольного управления неодинаковы и зависят от режима полета, т.е. положение равновесия вертолета достигается при различных балансировочных отклонениях РЦШ и кольца АП. Минимальными запасами управления пилот располагает на висении и максимальной скорости полете.
Решающее влияние на балансировку оказывает продольная центровка, поэтому установлены ограничения по предельно-передней и предельно-задней центровкам +370 и-80 мм.
Продольное равновесие вертолета устанавливается при некотором балансировочном положении вертолета по тангажу (рис.5). Из кривых видно, что помере увеличения скорости угол тангажа уменьшается, вертолет опускает нос. Это объясняется соответствующим изменением продольных сил и моментов, обеспечивающих равновесие вертолета. Минимальный угол тангажа соответствует полету на максимальной скорости с предельно-передней центровкой. Максимальный угол тангажа вертолет имеет на режиме висения с предельно-задней центровкой. Это обусловлено, в основном, влиянием стабилизатора, находящегося в индуктивном потоке от НВ.
|
|
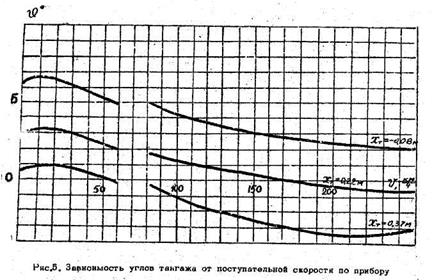
Следует помнить:
- на режиме висения, вследствие больших балансировочных углов тангажа, хвостовая балка вертолета опущена. Поэтому при невыдерживании высоты висения возникает опасность повреждения рулевого винта;
- в полете на повышенных скоростях на недопустимо малой высоте, вследствие минимального угла тангажа возникает опасность несоздания вертолету посадочного положения и приземления на повышенной скорости в случае посадки с отказавшими двигателями.
Выводы:
1. На вертолет Ми-8 в полете действует совокупность сил и моментов в продольной плоскости.
2. Для выполнения условий равновесия вертолета на установившихся режимах полета при заданных значениях скорости и угле тангажа пилот осуществляет балансировку вертолета помощью органов продольного управления: РЦШ и кольца АП. При этом конус вращения НВ получает управляемый завал в продольной плоскости.
3. Балансировочные отклонения органов управления и углы тангажа вертолета Мл-8 рассматриваются по балансировочным кривым, с помощью которых можно оценить запасы продольного управления на основных эксплуатационных режимах вертолета.
1.3. Поперечная балансировка
Целью поперечной балансировки является сохранение равновесия сил и моментов, действующих в поперечной плоскости, перпендикулярной продольной оси 0х вертолета. Возможны два способа поперечной балансировки: с креном без скольжения, без крена со скольжением. В обоих случаях движение вертолета прямолинейное и равномерное, с постоянным курсовым углом. При балансировке с креном без скольжения курсовой угол равен нулю.
На вертолете Ми-8 в поперечной плоскости действуют следующие силы и моменты:
- сила тяги рулевого венте Zpв. На моторных режимах направлена влево по полету, на режиме самовращения НВ - вправо;
- поперечная сила несущего винта Zн. Представляет собой проекцию силы Rн на поперечную ось 0z. Направлена вправо на моторных режимах и влево - на режиме самовращения НВ. Возникает вследствие бокового завала конуса вращения НВ, вызванного поступательнвм движением вертолета и поперечными отклонениями РЦШ;
- поперечная сила фюзеляжа Zф. Появляется при наличии скольжения вертолета в случае балансировки без крена;
- кренящий момент oт несущего винта Мхн. Возникает под действием поперечной силы Zн на плече Ун относительно продольной оси 0х. Момент Мхн стремится накренить вертолет вправо на моторных режимах и влево - на режиме самовращения НВ;
- инерционный момент за счет разноса ГШ Мхr. Направлены в сторону бокового завала конуса вращения НВ;
- кренящий момент от тяги рулевого винта Мхр. Действует на плече hрв относительно оси 0х стремится накренить вертолет влево на моторных режимах и вправо - на режиме самовращения НВ.
Вертолет находится в состоянии поперечного равновесия, если алгебраические суммы поперечных сил и их моментов относительно продольной оси 0x равны нулю. При этом возможны два способа поперечной балансировки вертолета: без скольжения и со скольжением.
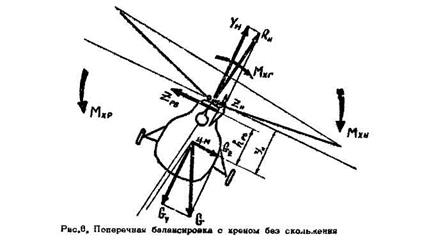
Для того, чтобы выполнить полет без скольжения, должны быть уравновешены силы тяги РВ и поперечная сила НВ Zн. В противном случае под действием силы Zрв вертолет начнет смещаться влево и появится левое скольжение. Для устранения скольжения необходимо наклонить конус вращения НВ вправо для увеличения боковой силы Zн, уравновешивающей силу Zpb. При этом появляется кренящий момент Мхн (рис.6).
|
|
F
Обычно плечо Ун больше плеча hрв, поэтому при равенстве сил вертолет накренивается вправо. При наклоне конуса вправо появляется инерционный момент на втулке за счет разноса ГШ Мхr, также действующий вправо. Крен вызывает появление составляющей силы тяжести G · Sinγ. Кренящие моменты будут сбалансированы при Zрв >Zh.
Условие поперечной балансировки с креном без скольжения имеет вид:
ΣFz = Zн+G Sinγ-Zрв =0 (2)
ΣMн=Zн·Ун+Mхr-Zрв·hрв=0 (3)
На режиме самовращения НВ тяга РВ направлена вправо по полету. Для устранения правого скольжения необходимо конус вращения НВ отклонить влево, вертолет будет сбалансирован с некоторым левым креном. Величина балансировочного крена зависит от тяги РВ на данном режиме полета, т.е. от потребной мощности НВ Nnomp.
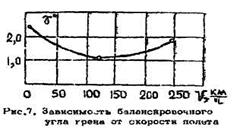
Из графической зависимости угла крена вертолета Ми-8 от скорости полета при постоянной мощности двигателей (рис.7) следует, что на режиме висения при наибольшей потребной мощности Nnomp крен вертолета вправо также наибольший. В полете с поступательной скоростью крен вертолета меньше, а на экономической скорости υэк -минимальный.
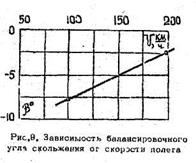
Представим себе, что пилот устранил крен вертолета, для чего конус вращения НВ отклонил влево. При этом поперечная сила Zн уменьшится и исчезнет составляющая GSinγ. Тогда под действием неуравновешенной силы тяги PВ вертолет начнет смещаться влево -появляется левое скольжение (на режиме самовращения НВ вертолет получит правое скольжение). Вследствие несимметричной обдувки фюзеляжа возникает боковая аэродинамическая сила Zф, направленная в сторону, противоположную скольжению. Равновесие сил и моментов устанавливается яри некотором угле скольжения β (рис.8):
ΣFz=Zн+Zн-Zрв=0; (4)
ΣМх =Мхн+Мхr-Мхp-Мхф. (5)
Момент от фюзеляжа Mхф невелик и оказывает незначительное влияние. Боковая аэродинамическая сила фюзеляжа Zф при постоянном угле скольжения растет пропорционально квадрату скорости:
|
|
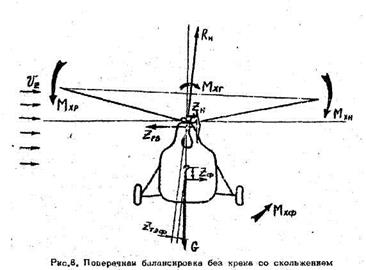
Zф=Gzф  . Поэтому для сохранения равновесия угол скольжения необходимо уменьшать, воздействуя на педали управления (рис.9).
. Поэтому для сохранения равновесия угол скольжения необходимо уменьшать, воздействуя на педали управления (рис.9).
|
|
Поперечная балансировка вертолета осуществляется путем боковых отклонений кольца АП и РЦШ. На каждом режиме полета вертолет балансируется при вполне определенном положении кольца автомата перекоса и РЦШ (рис.10). Ход балансировоч-ных кривых показывает, что с ростом скорости кольцо АП должно занимать более левое положение, так как угол естественного завала конуса НВ вправо увеличивается, и вертолет стремится к смещению и крену вправо. Для сохранения поперечного равновесия необходимо постепенно отклонять РЦШ влево. И наоборот, по мере уменьшения скорости кольцо АП и РЦШ должны занимать более правое положение. На режиме висения РЦШ должна занимать крайнее правое положение.
Изменение режима работы силовой установи при постоянной скорости также влияет на балансировочное отклонение кольца автомата перекоса. Так, при повышенном режиме работы двигателей требуется дополнительное отклонение вправо кольца автомата перекоса и РЦЩ. Это вызвано тем, что пилот с целью парирования возросшего реактивного момента НВ увеличивает тягу РВ.
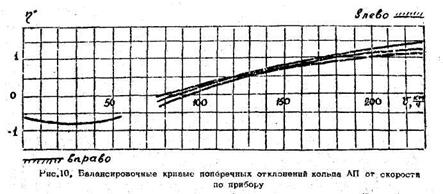
Изменение продольной центровки практически не сказывается на условиях поперечной балансировки. Сравнивая балансировочные отклонения РЦШ и кольца АП с их предельными значениями, можно определить запасы поперечного управления вертолета.
Из анализа кривых (см.рис.10) видно, что минимальные запасы по отклонению РЦШ влево получаются в полете на максимальной скорости и в режиме самовращения НВ, а минимальные запасы по отклонению РЦШ вправо - на режиме висения при максимальной мощности двигателей.
ВЫВОДЫ:
1. На вертолет Ми-8 в полете действует совокупность сил и моментов в поперечной плоскости.
2. Для сохранения условий равновесия вертолет Ми-8 балансируется либо с креном без скольжения, либо без крена, но со скольжением. Численные значения крена и скольжения невелики и зависят от скорости полете. На режиме висения вертолет балансируется только при величине крена.
3. Поперечная балансировка осуществляется путем боковых отклонений РЦШ. Балансировочное положение РЦШ зависит от скорости полета и режима работы силовой установки, определяется с помощью балансировочных кривых.
4. Анализ балансировочных кривых вертолета Ми-8 показывает, что при соблюдении установленных ограничений вертолет балансируется с достаточными запасами поперечного управления.
1.4. Путевая балансировка
Целью путевой балансировки является сохранение равновесия сил и моментов, действующих в азимутальной плоскости относительно нормальной оси 0у. На вертолете Ми-8 относительно оси Оу действуют следующие моменты рыскания:
- реактивный момент несущего винта Мyн. Он образуется силами сопротивления вращению лопастей НВ. Направлен против вращения НB, передается на втулку и трансмиссию, стремится развернуть вертолет влево по полету;
- момент от тяги рулевого винта МУР =ZРВ · ℓРВ. Действует на плече ℓРВ за счет выноса РВ относительно центра масс вертолета. Стремится развернуть вертолет вправо по полету. На режиме самовращения НВ вертолет под действием крутящего (увлекающего) момента НВ разворачивается вправо, Поэтому РB переводится на отрицательные углы установки, и момент МУР имеет противоположное направление, т.e. разворачивает вертолет влево;
- момент рыскания от боковой силы фюзеляже МУФ. Oбразуется только в полете со скольжением. В этомм случае центр движения фюзеляжа находится позади центра масс вертолета на расстоянии ℓФ. На моторных режимах полета боковая сила фюзеляжа направлена вправо по полету, и момент МУФ действует влево. На режиме самовращения МУФ действует вправо. Следовательно, на любом режиме полета момент рыскания фюзеляжа МУФ совпадает по направлению с реактивным (крутящим) моментом НВ.
Вертолет находится в состояния путевого равновесия, если алгебраические суммы поперечных сил и их моментов относительно нормальной оси ОУ равны нулю.
Следует учитывать, что движение вертолета по рысканию (относительно оси Оу) взаимосвязано с его движением по крену (относительно оси Ох). Поэтому путевое равновесие рассматривается в сочетании с поперечным равновесием вертолета и может осуществляться двумя способами; с креном без скольжения и без крена со скольжением (рис.11,а и 11,б).
В зависимости от этого условия равновесия сил и моментов имеют следующий вид:
ΣFZ=Zн+GSin  - Zрв=0; (6)
- Zрв=0; (6)
Балансировка без скольжения
ZMу=Мун – Mур =0. (7)
ΣFZ=Zн+Zф - Zрв = 0; (8)
Балансировка со скольжением
ZMу=Мун – Mуф – Mур =0. (9)
|
|
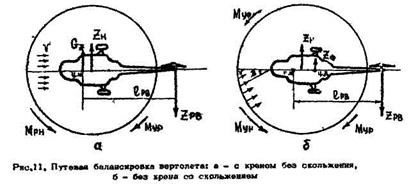
В полете со скольжением вертолет движется с некоторым аэродинамическим углом сноса (рис.11,6). В этом случае тяга РВ должна быте больше, чем для балансировки без скольжения, так как необходимо уравновесить дополнительный момент от боковой обдувки фюзеляжа МУФ. Поэтому полет со скольжением выполняется с меньшими запасами путевого управления, чем без скольжения.
Из уравнений (б)-(9) следует, что путевая балансировка вертолета на заданном режиме осуществляется при определенном моменте, создаваемом тягой рулевого винта МУР. Следовательно, при переходе на другой режим полета необходимо изменить и тягу РВ.
|
|
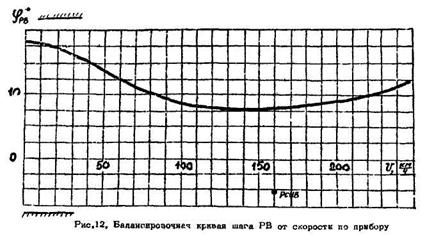
Для каждого режима полета можно определить балансировочные углы установки лопастей рулевого винта YРВ, при которых вертолет будет находиться в состоянии путевого равновесия. На рис.12 приведены балансировочные кривые вертолета Ми-8, представляющие собой графическую зависимость углов установки лопастей РВ YРВ скорости полета. Анализ кривых показывает следующее:
- на всех режимах моторного полете углы YРВ имеют положительное значение, т.e. требуется отклонение правой педали вперед;
- на режиме горизонтального полета с увеличением скорости до экономической Vэк балансировочные углы YРВ уменьшаются. Это объясняется тем, что уменьшается потребная мощность НВ, а значит шаг НВ и его реактивный момент. Под действием неуравновешенного момента от тяги РВ вертолет будет разворачиваться вправо. Поэтому для восстановления путевого равновесия требуется уменьшить углы установки PB;
- на скоростях полета больше экономической, несмотря на увеличение потребной мощности НВ и его реактивного момента, углы установки VРВ почти не изменяются, так как РВ продолжает увеличивать тягу вследствие косой обдувки;
- при скоростях полета больше 170 км/ч балансировочные углы YРВ увеличиваются, так как потребная мощность НВ продолжает увеличиваться, а условия работы РВ ухудшаются вследствие потерь на вихреобразование;
- при уменьшении мощности до нуля (режим самовращения НВ) РВ переводится на отрицательные углы установки, т.е. на режиме самовращения НB требуются наибольшие отрицательные углы установка РВ;
- при увеличении мощности двигателей (шага НВ) балансировочные углы YРВ на соответствующих скоростях полета должны быть больше. При работе двигателей на взлетном режиме тяга РВ близка к максимальной, а правая педаль почти полностью отклонена вперед. Запас по путевому управлению почти полностью отсутствует.
Следует помнить: при нарушении установленных ограничений по скорости бокового ветра, массе вертолета, частоте вращения НВ потребные углы установки лопастей РВ могут быть больше максимально допустимых для вертолета Ми-8. В этом случае возможна нехватке полного хода правой педали - вертолет становится неуправляемы и разворачивается влево.
Выводы:
1. Боковое движение вертолета состоит из двух связанных между собой движений по крену и рысканию.
2. В состоянии бокового равновесия сохраняется равенство между собой сил, а также их моментов, действующих в поперечной и азимутальной плоскостях.
3. Боковая балансировка вертолета Ми-8 осуществляется с помощью отклонений РЦШ и педалей.
4. С помощью балансировочных кривых определяются запасы поперечного и путевого управления вертолета Ми-8 на различных режимах полета.
5. На боковую балансировку вертолета основное влияние оказывает работа рулевого винта. Поэтому знание особенностей аэродинамики РВ дозволяет лучше понять физический смысл летных ограничений вертолета Ми-8.
1.4.1. Особенности аэродинамики рулевого винта
Рулевые винты устанавливаются только на одновинтовых вертолетах с механическим приводом НВ. Вращение РВ осуществляется от главного редукторе с помощью трансмиссионных валов через промежуточный и хвостовой редукторы. Таким образом, для привода РВ производится отбор мощности силовой установки, составляющей для вертолета Ми-8 от 6,5 до 9,5% эффективной мощности двигателей.
На висении в штиль РВ работает в режиме осевого обтекания, а в поступательном полете и при висении с ветром - в режиме косого обтекания. Лопасти РВ имеют осевые шарниры, обеспечивавшие изменение его общего шага, и горизонтальные шарниры, благодаря которым лопасти могут совершать маховые движения относительно плоскости вращения. Следовательно, как и у НВ, при косой обдувке образуется завал оси конуса вращения и полной аэродинамической силы РВ - возникают продольная и боковая силы.
В практической аэродинамике принято учитывать только силу тяги Zрв, направленную по оси вала РВ. Продольной и боковой силами вследствие их малости обычно пренебрегают. Кроме тяги РВ создает реактивный момент, причиной возникновения которого является действие сил сопротивления лопастей. Сила тяги РВ определяется по формуле основного закона сопротивления воздуха:
Zрв= 0,5 GZрв  (ωрв Zрв)2 Fрв, (10)
(ωрв Zрв)2 Fрв, (10)
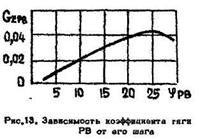
где GZрв - коэффициент тяги РВ. Он характеризует аэродинамические свойства РВ, его геометрические характеристики. Изменяется в зависимости от углов установки лопастей YРВ (рис. 13), а при постоянном значении - YРВ от углов атаки элементов.
Как видно из графика, при увеличении YРВ от 0 до 15° коэффициент GZрв изменяется линейно. При дальнейшем увеличении YРВ прирост GZрв уменьшается, что объясняется концевыми и комлевыми потерями тяги РВ вследствие возникновения срывных явлений.
|
|
При перемещениях и вращении вертолета, изменении скорости продольной и боковой обдувки тяга НB при фиксированном шаге изменяется. При увеличении скорости поступательного движения или на режиме висения со встречным ветром тяга РB увеличивается вследствие усиления эффекта косого обтекания РВ. Например, при разгоне скорости на взлете вертолет разворачивается вправо, требуется отклонение левой педали. Наоборот, при торможении перед зависанием вертолет под действием реактивного момента НВ разворачивается влево. Требуется отклонение правой педали вперед.
Висение рекомендуется выполнять против ветра, так как в этом случае положение вертолета более устойчиво, и обеспечиваются наибольшие запасы по мощности и путевому управлению. Более сложным по технике пилотирования является выполнение висения в условиях порывистого ветра, особенно бокового и попутного, так как затрудняется выдерживание путевого равновесия.
Боковой ветер слева (рис.14). РВ работает в осевом потоке (подобно НВ при вертикальном подъеме). При увеличении скорости ветра слева уменьшаются углы атаки элементов лопастей РВ при постоянных значениях YРВ (фиксированном положении педалей), падает тяга РВ,
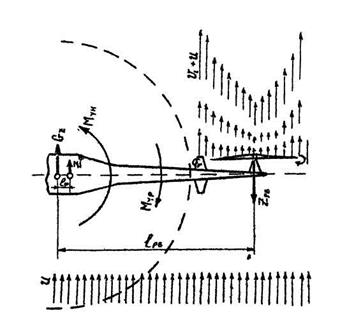 |
Рис.14. Работа РВ при висении с ветром слева
уменьшается момент рыскания от тяги РВ Мур. Под действием неуравновешенного реактивного момента НВ вертолет, подобно флюгеру, разворачивается влево (носом против ветра). Для удержания вертолета по курсу пилот должен увеличить углы установки рулевого винта, т.е. переместить вперед правую педаль. При этом, несмотря на увеличение углов YРВ углы атаки изменяются незначительно и, следовательно, мощность на вращение РВ сохраняется неизменной - заметного увеличения частоты вращения и мощности турбокомпрессоров не происходит.
Боковой ветер справа (рис.15). РВ работает в осевом потоке подобно НВ при моторном снижении и в режиме вихревого кольца. При увеличении ветра справа углы атаки элементов лопастей РВ увеличиваются, что должно приводить к росту силы тяги РВ. Однако рост тяги при фиксированном положении педалей наблюдается лишь при малых значениях скорости ветра, не превышающих 5 м/с, и когда вертолет облегчен (малы балансировочные значения YРВ). При этом вертолет разворачивается, подобно флюгеру, вправо (носом против ветра).
|
|
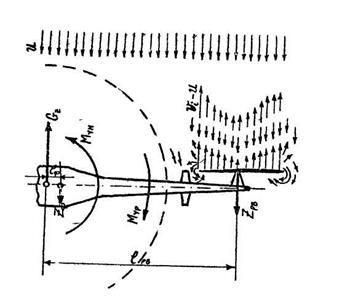
Рис.15. Работа РВ при висении с ветром справа
При больших скоростях ветра, близких к максимально допустимым, при углах YРВ более 15° картина обтекания РВ заметно меняется. Тяга РВ начинает резко уменьшаться, так как углы атаки корневых сечений лопастей становятся закритическими, на концах лопастей развивается вихревое кольцо. Следовательно, потери рулевого винта, вызванные вихреобразованием, резко возрастают. Падение тяги сопровождается резким увеличением потребной мощности на вращение РВ. Под действием неуравновешенного реактивного момента НВ вертолет разворачивается влево, т.е. хвостом на ветер. Для удержания вертолета по курсу требуется отклонение правой педали вперед. "Расход" правой педали особенно возрастает при висении с предельной массой и увеличении высоты висения относительно уровня моря, так как по мере уменьшения плотности воздуха для сохранения тяги РВ возрастают потребные углы установки лопастей. На определенной высоте при сильном ветре справа правая педаль может отклоняться вперед до упора. Вертолет становится неуправляемым.
На характер изменения тяги РВ существенное влияние оказывает интерференция - аэродинамическое взаимовлияние НВ, РВ и планера вертолета в условиях ветра, особенно вблизи земли. Это явление объясняется следующим. Рулевой винт работает вблизи вихревого потока НВ, и в некоторых случаях попадает в этот поток. Происходит наложение вихрей, образуемых НВ и РВ. При наличии ветра на висении вихревая система НВ сворачивается в четко выраженные вихревые шнуры (рис.16).
|
|
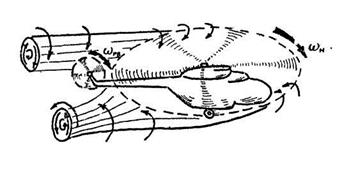
Рис.16. Возникновение интерференции между несущим и рулевым винтом
При встречно-боковом ветре или развороте на висении РВ попадает в область завихрения потока от НВ. При этом направление вращения вихрей НВ совпадает с направлением движения лопастей РВ (верхние лопасти движутся вперед по полету). Следовательно, относительные скорости обтекания лопастей РВ уменьшаются. При угле ветра справа ~45° осевая обдувка РВ, "набегающего" на хвостовую балку, усиливается потоком от НВ. Наблюдается дополнительное уменьшение силы тяги PВ.
При висении вблизи земля наблюдается более резкий "провал" тяги РВ по сравнению с условиями висения вдали от земли. Это объясняется усилением отрицательного влияния планера на работу РВ. Интерференция вблизи земли в условиях ветра имеет сложную картину и не поддается пока четкому физическому объяснению. Поэтому необходимо уяснить сам факт уменьшения силы тяги РВ при боковом ветре, вызванный уменьшением углов атаки лопастей РВ при ветре слева, а при ветре справа - явлениями срыва потока и вихревого кольца. Из-за влияния интерференции снижается эффективность путевого управления, т.е. увеличиваются потребные отклонения правой педали вперед.
Необходимо особо отметить связь между запасами путевого управления и частотой вращения несущего винта  н. Известно, что реактивный момент НВ обратно пропорционален н :
н. Известно, что реактивный момент НВ обратно пропорционален н :
Мун=7030  , [H·м] (11)
, [H·м] (11)
Из формулы следует, что в случае падения частоты вращения НБ увеличивается его реактивный момент. В то же время из-за наличия кинематической связи между НВ и РВ падает частота вращения РВ и, следовательно, тяга РВ. Требуется увеличить установочные углы лопастей РВ.
Таким образом, уменьшение частоты вращения НВ сопровождается снижением запасов путевого управления. В случае падения частоты вращения н на режиме висения вертолета возможна постановка правой недели на упор. Вертолет начнет вращение влево с увеличением угловой скорости.
ВЫВОДЫ:
1. При выполнении висения в экстремальных условиях (предельная полетная масса, высокогорная площадка, высокие температуры наружного воздуха, турбулентность) нельзя допускать уменьшения частоты вращения НВ ниже номинальной, чтобы не израсходовать запас путевого управления.
2. Сильный боковой ветер, энергичные перемещения вбок и развороты вертолета на висении значительно уменьшает тягу РВ. В связи с этим Руководством по летной эксплуатации вертолета Ми-8 установлены ограничения по скорости бокового ветра у земли и в горах, полетной массе, угловой скорости разворота
.
2.УСТОЙЧИВОСТЬ ВЕРТОЛЕТА
2.1. Основные понятия и рекомендации
При выполнении какого-либо режима полета вертолет Ми-8 подвергается действие различных возмущений, нарушающих состояние равновесия. Поэтому необходимо определить характер возмущенного движения вертолета, его реакцию на внешние воздействия, т.е. его устойчивость.
Характеристики устойчивости определяют пилотажные качества вертолета и имеют решающее значение для безопасности полета. Зная особенности поведения вертолета в возмущенном движении, пилот может судить об эффективности управления вертолета на данном режиме полета.
При изучении вопросов устойчивости вертолета Ми-8 необходимо знать:
- какова физическая сущность явления устойчивости;
- какие эксплуатационные факторы влияют на запас устойчивости вертолета Ми-8;
- на какие виды подразделяется устойчивость; краткую характеристику продольной и боковой устойчивости вертолета Ми-8;
- какова методика анализа статической и динамической устойчивости вертолета;
- механизм возникновения стабилизирующих и демпфирующих моментов, влияние на устойчивость несущего и рулевого винтов, фюзеляжа, стабилизатора, киля;
- поведение .вертолета Ми-8 на различных этапах полета под влиянием внешних возмущений;
- назначение автопилота и его роль в улучшении устойчивости вертолета Ми-8.
Для достаточного понимания этих вопросов необходимо уметь пользоваться упрощенными схемами и графиками, которые дают возможность судить об устойчивости и управляемости вертолета Ми-8.
Под устойчивостью понимается способность вертолета возвращаться в исходному режиму установившегося, полета без вмешательства пилота в управление после окончания воздействия внешнего возмущения. Внешними возмущениями могут быть: порывы ветра, изменение центровки, выработка топлива, управляющие воздействия пилота. При этом изменяются углы атаки НВ, воздушная скорость и другие параметры вертолета.
Для сохранения заданного режима полета необходимо, чтобы после воздействия внешних возмущений на вертолете возникали восстанавливающие (стабилизирующие) силы и моменты. В этом случае вертолет обладает статической устойчивостью. Если после нарушения равновесия появляются дестабилизирующие моменты, и вертолет имеет тенденцию уйти от исходного состояния, он является статически неустойчивым.
Статическая устойчивость подразделяется на продольную, поперечную и путевую. Представляет собой устойчивость состояния равновесия вертолета на заданном режиме полета. При этом необходимо рассматривать изменение одного из параметров (скорости, угла атаки, крена и др.) при неизменных остальных параметрах.
Наличие статической устойчивости - необходимое, но недостаточное условие его динамической устойчивости.
Динамическая устойчивость рассматривает характер собственного возмущенного движения вертолета, т.е. его поведение через некоторый промежуток времени после окончания внешнего воздействия. Такое движение может иметь затухающий или незатухающий характер (рис.17}
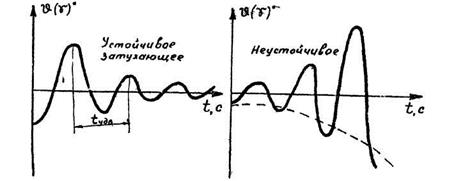
Рис.17. Виды возмущенного движения вертолета
Если амплитуда колебаний вертолета с течением времени уменьшается, вертолет обладает динамической устойчивостью, а если непрерывно увеличивается - вертолет динамически неустойчив.
Характер собственных колебаний вертолета зависит не только от степени статической устойчивости, а также от таких факторов, как вид возмущения, направление его действия, соотношение инерционных и демпфирующих моментов. Инерционные моменты возникают за счет ускорений, вызванных угловыми вращениями, разгоном или торможением вертолета. Они стремятся увеличить амплитуду колебаний вертолета. Демпфирующие моменты вертолета по своей природе являются аэродинамическими.
Они вызваны появлением сил и моментов, препятствующих развитию возмущенного движения. Так, при колебаниях физического маятника силы сопротивления воздуха оказывают демпфирующее действие и гасят эти колебания.
На вертолете демпфирующие силы и моменты возникают на стабилизаторе, фюзеляже, несущем и рулевом винтах. Направление сил и моментов можно определить только в процессе вращения вертолета. При изменении угла тангажа вертолете с некоторой угловой скоростью вращения  z на стабилизаторе появляется прирост подъемной силы ∆ Уст , так как при наличии обдувки от окружного вращения изменяется угол атаки стабилизатора
z на стабилизаторе появляется прирост подъемной силы ∆ Уст , так как при наличии обдувки от окружного вращения изменяется угол атаки стабилизатора  . Прирост подъемной силы ΔУст направлен против вращения и вызывает момент относительно центра масс ΔМст, останавливающий вращение (рис.18):
. Прирост подъемной силы ΔУст направлен против вращения и вызывает момент относительно центра масс ΔМст, останавливающий вращение (рис.18):
∆  ст =
ст =  ; ∆Мст =∆Уст · ℓст .
; ∆Мст =∆Уст · ℓст .
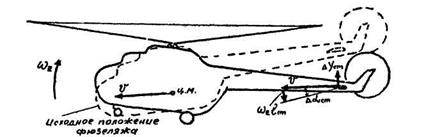
Рис. 18. Демпфирующие свойства стабилизатора вертолета
Необходимо заметить, что момент ∆М ст не может возвратить вертолет к исходному состоянию равновесия, а лишъ препятствует его вращению так как сила ∆Уст исчезает после остановки вращения.
Аналогично возникают демпфирующие моменты от аэродинамических сил фюзеляжа вертолета. Наиболее сильное демпфирующее действие на вертолет оказывает несущий винт. При изменениях угла крена или тангажа возникает угловое ускорение вертолета. Из-за наличия инерции лопастей НВ и их шарнирной подвески ось конуса вращения несущего винта с отставанием следует за его конструктивной осью (рис.19). Следовательно, отклонение вектора полной аэродинамической силы Rh от оси вала НВ приводит к появлению момента Mzн, препятствующего вращению:
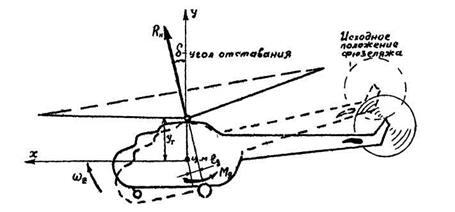
Рис.19. Демпфирующие свойства НВ вертолета без разноса ГШ
Как известно, отклонение оси конуса вращения НВ вызывает появление инерционного момента на втулке за счет разноса горизонтальных шарниров Мгш (рис.20). Момент Мгш действует в плоскости силы Rh и стремится совместить с ней ось вала винта. Таким образом, при наличии разноса ГШ момент демпфирования НВ Мq определяется суммой:
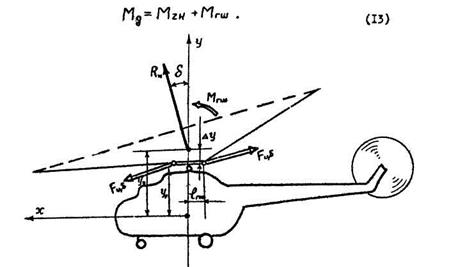
Рис.20. Демпфирующие свойства НВ вертолета при разнесенных ГШ
Момент Мq будет тем больше, чем выше расположен винт относительно центра масс и чем больше разнос ГШ.
Демпфирующие свойства несущего винта проявляются также при вертикальных перемещениях вертолета. Так, при увеличении вертикальной скорости подъема Vу тяга НВ уменьшается из-за уменьшения углов атаки элементов лопастей. Движение вертолета замедляется. При вертикальном снижении, наоборот, тяга НВ возрастает вследствие увеличения угла атаки элементов, т.е. НВ способен гасить броски вертолета при выполнении полете в зоне повышенной турбулентности воздуха.
Наличие на вертолете рулевого винта способствует повышению путевого демпфирования. Например, при увеличении угловой скорости вращения вертолета влево  тяга РВ будет возрастать за счет дополнительной осевой обдувки справа. Поэтому в случае повреждения РB резко снижается способность вертолета к путевой стабилизации.
тяга РВ будет возрастать за счет дополнительной осевой обдувки справа. Поэтому в случае повреждения РB резко снижается способность вертолета к путевой стабилизации.
Вывод. Демпфирующие свойства оказывают определяющее влияние на устойчивость вертолета, так как способствуют затуханию колебаний и переходу вертолета к исходному установившемуся движению. При слабом демпфировании колебания становятся незатухающими. Полет на динамически неустойчивом вертолете требует постоянного вмешательства пилота, точности пилотирования и повышенного внимания.
Отличительной особенностью вертолетов является взаимное влияние движений по тангажу, крену и рысканию. Так, продольные колебания вертолета (относительно поперечной оси 0Z) приводят к изменению аэродинамических сил НВ и РВ. Появляются дополнительные моменты крена (относительно продольной оси 0х ) и рыскания (относительно нормальной оси 0у ), следовательно, начинаются колебания поперечные и путевые. Наиболее тесная связь проявляется в полете между движениями по крену и рысканию.
Возмущенное движение вертолета имеет сложный пространственный характер. Поэтому в целях лучшей наглядности и простоты изучения устойчивость вертолета рассматривается в виде продольной, поперечной и путевой.
2.2. Продольная статическая устойчивость по углу атаки.
Продольную статическую устойчивость принято подразделять на устойчивость по углу атаки (при постоянной скорости) и устойчивость по скорости (при постоянном угле атаки).
Для суждения о характеристиках продольной устойчивости необходимо определить, как изменяется продольный аэродинамический момент вертолета после возмущения по тому или иному параметру. Результирующий продольный момент вертолета создают аэродинамические силы несущего винта, фюзеляжа, стабилизатора. При этом основное влияние на устойчивость оказывают характеристики несущего винта.
Несущий винт способствует статической неустойчивости по углу атаки на всем диапазоне скоростей. На рис.21 показано, что при случайном увеличении угла атаки НВ н возникает завал конуса вращения НВ (сплошные линии) и отклонение силы Rн назад по отношению к балансировочному положению (штриховые линии). Завал конуса вращения вызывает появление продольного момента НВ на кабрирование ∆Мzн, причем за счет разноса ГШ действует дополнительный момент на кабрирование Мzг. Суммарный продольный момент ∆Мzн + ∆Мzг, действующий в новом статическом положении вертолета направлен в сторону дальнейшего увеличения угла атаки. При уменьшении угла атаки н от исходного положения действие НВ будет противоположным, т.е. появляется
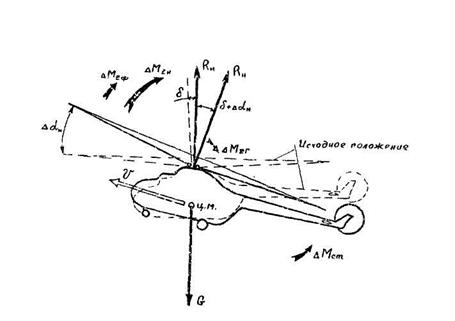
Рис. 21. Изменение продольных моментов вертолета
при случайном положении угла атаки
момент; на пикирование, направленный на дальнейшее уменьшение угла атаки.
Фюзеляж вертолета без стабилизатора также способствует статической неустойчивости вертолета по углу атаки, так как его центр давления находится обычно впереди центра масс. Поэтому в случае изменения угла атаки появляется стабилизирующий момент, направленный на дальнейшее отклонение фюзеляжа по углу атаки. Зависимость коэффициента продольного момента фюзеляжа mZ oт угла атаки показана на рис.22.
Стабилизатор оказывает положительное влияние на статическую устойчивость вертолета по углу атаки. При увеличении угла атаки вертолета увеличивается и угол атаки на стабилизаторе. Появляется прирост подъемной силы ∆ Уст , действующий на большом плече относительно центра масс вертолета. Дополнительный момент стабилизатора ∆ Мст направлен на восстановление исходного угла атаки.
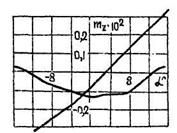
Рис. 22. Зависимость коэффициента
продольного момента фюзеляжа от
угла атаки.
Фюзеляж с установленным на нем стабилизатором становится устойчивым по углу атаки (рис. 22).
Эффективность стабилизатора возрастает по мере увеличения поступательной скорости. Однако из-за неблагоприятного влияния НВ вертолет становится устойчивым по углу атаки лишь на больших скоростях полета, когда сила Уст достаточно велика. На малых и средних скоростях полета вертолет Ми-8 неустойчив.
2.3. Продольная статическая устойчивость по скорости
Если при случайном увеличении скорости продольный момент вертолета направлен на пикирование, то суммарное действие сил вдоль продольной оси Ох будет направлено на увеличение скорости. В этом случае вертолет является статически неустойчивым по скорости. Если в результате увеличения скорости сумма сил вдоль оси Ох уменьшается, вертолет имеет тенденцию к сохранению скорости прежнего режиме, т.e. является статически устойчивым по скорости.
Несущий винт способствует устойчивости по скорости во всем диапазоне скоростей полета. Это значит, что при увеличении скорости полета или встречном порыве ветра возникает завал назад, - конус вращения НВ и его полная аэродинамическая сила Rн отклоняются назад (рис.23). При этом моменты от силы Rн и за счет разноса ГШ Mzг действует на кабрирование. Лобовое сопротивление вертолета возрастает, а продольная сила НВ Хн уменьшается. Следовательно, дополнительные сила и момент способствуют уменьшению скорости, т.е. направлены на сохранение ее прежнего значения.
Фюзеляж вертолета Ми-8 без стабилизатора является статически неустойчивым. Это установлено путем расчетов и продувок в аэродинамической трубе.
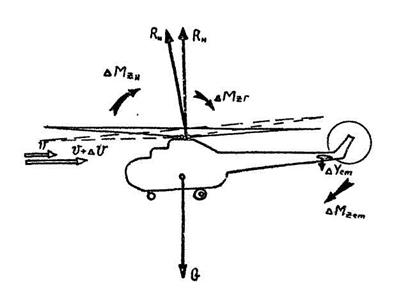
Рис. 23. Изменение продольных моментов НВ и стабилизатора
при случайном изменении скорости
Стабилизатор придает вертолету устойчивость по скорости, так как в случае увеличения скорости возрастает отрицательная подъемная сила Уст. Под действием дополнительного кабрирующего момента стабилизатора ∆Мст вертолет стремится восстановить скорость. В диапазоне скоростей 30...80 км/ч эффективность стабилизатора значительно снижается. Вертолет становится статически неустойчивым. На остальных скоростях полета вертолет Ми-8 устойчив по скорости. Степень устойчивости вертолета можно оценить по углу наклона балансировочных кривых (см.рис 4). Увеличение угла наклона свидетельствует о повышении запаса устойчивости. "Ложка" кривых соответствует скоростям 30... 80 км/ч, на которых вертолет Ми-8 статически неустойчив по скорости.
2.4. Динамическая устойчивость продольного движения
Характеристики статической устойчивости по углу атаки и по скорости в совокупности с демпфирующими свойствами оказывают влияние на динамическую устойчивость вертолета Ми-8.
Характер продольного возмущенного движения вертолета Ми-8 без автопилота представляет собой колебательный процесс, включающий в себя короткопериодические и длиннопериодические колебания с периодом соответственно 0,5...3 и 10...50 с.
Короткопериодические колебания связаны с вращением вертолета вокруг центра масс под действием периодически изменяющихся моментов аэродинамических сил. Пилот замечает это движение по частому изменению угла тангажа.
Длиннопериодические колебания связаны с изменением траектории движения центра масс под влиянием периодически изменяющихся аэродинамических сил.
Ниже рассмотрены особенности продольного движения при выполнении розничных режимов полета на вертолете Ми-8.
2.4.1. Устойчивость на режиме висения
На режиме висения в спокойной атмосфере ось конуса вращения НВ совпадает с осью вала винта. Тяга НВ уравновешивает сипу тяжести вертолете (рис.24,а).
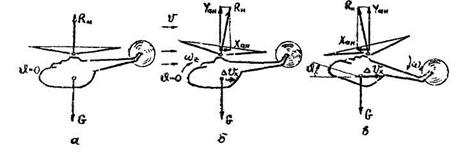
Рис. 24. Продольное возмущенное движение вертолета на висении.
При внезапном действии на вертолет порыва ветра со скоростью U сила Rн увеличится и отклонится назад вместе с конусом вращения НВ (рис.24,б). Одновременно с этим возникает момент за счет разноса ГШ Мzг. Следовательно, появляется кабрирующий момент НВ Мzн и горизонтальная составляющая Х н . Под действием момента Мzн вертолет будет увеличивать угол тангажа со скоростью Z , а сила Х н вместе с силой лобового сопротивления фюзеляжа вызовет перемещение вертолета назад со скоростью ∆  х .
х .
Вследствие косой обдувки ее скоростью ∆ х конус НВ начнет заваливаться в другую сторону. Тяга НВ будет отставать от оси вала винта и через некоторое время займет относительно ее положение, показанное на рис.24 в. По мере движения вертолета к положению "в" угол тангажа, вследствие неустойчивости НВ по углу атаки, будет увеличиваться. Вместе с тем из-за косой обдувки сзади конус врещения НВ отклоняется вперед, и его полная аэродинамическая сила Rн возрастает.
Следовательно, НВ создает значительный продольный момент ∆Мz., направленный на восстановление угла тангажа и уменьшение скорости до нуля. Под действием момента ∆Мz., вертолет развивает угловую скорость обратного движения Z. Из-за слабого демпфирования вертолет с ускореннием возвращается к состоянию равновесия и по инерции проходит это положение. Угол тангажа начнет изменяться в противоположную сторону, но в большей степени. Таким обрезом, движение вертолета становится колебательным, с возрастающей амплитудой по углу тангажа.
2.4.2. Устойчивость в поступательном движении
При переходе к режиму с поступательной скоростью запас статической устойчивости вертолета Ми-8 увеличивается вследствие повышения эффективности стабилизатора и НВ. Расчеты и летные испытания показывают, что с увеличением площади стабилизатора и выноса его из струи НВ можно получить устойчивое продольное движение вертолета. Стабилизатор позволяет расширить допустимый диапазон продольных центровок, улучшить статическую устойчивость и демпфирование вертолета. Однако необходимо учитывать неблагоприятную роль стабилизатора при висении вертолета. Поэтому площадь стабилизатора ограничивается главным образом из условия допустимого запаса управления при висении с предельно-передней центровкой и ветром сзади.
Вертолет Ми-8 без автопилота имеет слабо неустойчивое продольное движение, связанное в основном со статической неустойчивостью по углу атаки несущего винта. При полете загруженного вертолета с предельно-задней и нижней центровкой неустойчивость проявляется в наибольшей мере.
Особенно неблагоприятная неустойчивость вертолета на закритических режимах, при увеличении скорости больше максимально допустимой 250 км/ ч. В этом случае из-за срыва потока с отступающих лопастей их взмахи вниз становятся сильнее и конус вращения НВ дополнительно заваливается назад. Под действием дополнительного кабрирующего момента происходит увеличение угла тангажа и угла атаки НВ - зона срыва потока расширяется. Наблюдается нарастающее кабрирование вертолета ("подхват").
Выводы:
1. Вертолет Ми-8 с выключенным автопилотом динамически неустойчив в продольном отношении.
2. На режиме висения степень неустойчивости вертолета наибольшая. Предоставленный самому себе в условиях возмущений, он не возвращается к исходному состоянию равновесия.
3. С увеличением поступательной скорости степень неустойчивости вертолета становится меньше. На скоростях больше максимальной допустимой Umax продольная устойчивость резко ухудшается, особенно при задних центровках.
4. Включение автопилота АП-34Б придает вертолету устойчивость, обеспечивает точность стабилизации по углу тангажа ±0,5°.
5. С улучшением характеристик устойчивости упрощается техника пилотирования вертолета, что особенно сказывается на малых скоростях и висении.
2.5. Боковая статическая устойчивость
Боковая статическая устойчивость - это способность вертолета самостоятельно, без вмешательства пилота восстанавливать боковое равновесие после окончания внешнего воздействия.
Боковая устойчивость характеризует поведение вертолета относительно осей Ох и Оу и условно подразделяется на поперечную и путевую. Движение вертолета по крену и курсу взаимосвязаны. При увеличении скорости полета это взаимовлияние усиливается. На боковую устойчивость вертолета Ми-8 оказывают влияние несущий винт, фюзеляж, киль, рулевой винт.
Вертолет при отсутствии скольжения статически нейтрален относительно оси Ох, так как крен сам по себе не вызывает дополнительных аэродинамических моментов. Однако в свободном полете крен вертолета вызывает скольжение, вследствие чего изменяются поперечные силы и моменты. Например, при случайном увеличении крена влево вертолет получает левое скольжение. За счет боковой обдувки завал конуса вращения НВ влево уменьшается. Появляется приращение момента от силы Rh несущего винта, момента от разноса ГШ Мгш и поперечной сила НВ Zн. Прирашение моментов и сил направлены вправо, на устранение крена и скольжения. Следовательно, несущий винт придает вертолету поперечную статическую устойчивость.
Нa рулевом винте вследствие скольжения изменяется осевая скорость обтекания. При скольжении влево тяга РВ уменьшается, а при скольжении вправо – увеличивается. Таким образом, изменение тяги РВ препятствует увеличению скольжения вертолета.
Фюзеляж вертолета в основном диапазоне углов атаки и скольжения неустойчив в поперечном отношении. Следовательно, из-за влияния НB и РВ вертолет Мк-8 обладает поперечной статической устойчивостью на всех режимах полета. Степень поперечной устойчивости увеличивается с ростом скорости полета, а на больших скоростях становится, даже излишней.
Путевая статическая устойчивость вертолета проявляется также только через скольжение. Основное влияние на путевую устойчивость оказывает рулевой винт, фюзеляж и киль. Так, при случайном повороте вертолета относительно оси Оу вправо вертолет получит левое скольжение. Тяга рулевого винта будет меньше, и вертолет под действием реактивного момента НВ будет стремиться занять исходное состояние путевого равновесия. Киль в этом случае также создает стабилизирующий момент. Фюзеляж вертолета в основном диапазоне углов атаки полета путевой статической устойчивостью не обладает.
Следовательно, РВ и киль придает вертолету Ми-8 путевую статическую устойчивость. Тяга РВ и боковая аэродинамическая сила киля действует относительно оси Оу на большом плече. Поэтому в путевом отношении вертолет Ми-8 имеет значительный запас устойчивости. Однако необходимо помнить, что при скольжении эффективности РВ вертолет Ми-8 может стать малоустойчивым или неустойчивым в путевом отношении, физическая картина этого явления на различных режимах полета заключается в следующем.
На висении в штиль вертолет по курсу статически нейтрален, так как после случайного изменения угла рыскания путевые моменты вертолета не изменяются, и вертолет остается в новом статическом положении.
При порывах ветра слева или при движении левым бортом вперед тяга РВ уменьшается {см.рис.14). Под действием неуравновешенного реактивного момента НВ стремится развернуться на ветер, уменьшая возникший угол скольжения. То есть вертолет будет статически устойчив в путевом отношении, поэтому пилотирование на этих режимах особой сложности не представляет. При слабых порывах ветра справа тяга РB может несколько возрасти (см.рис.15). Вместе с действием боковой силы киля это обеспечивает статическую устойчивость.
Однако при сильных порывах ветра справа или движении правым бортом вперед со споростью, превышающей ограничения РЛЭ, происходит падение тяги РВ вследствие развития срыва потока на лопастях. Вертолет становится статически неустойчивым по курсу и разворачивается хвостом на ветер. Если высота висения меньше половины радиуса НВ, экранирующее влияние земли приводы к скосу отраженного индуктивного потока НВ в зону работы РВ, уменьшая эффективность его работы. Удерживать направление полета педалями трудно - вертолет интенсивно "мотает" по курсу. Поэтому висение с правым боковым ветром или полет правый бортом вперед целесообразно выполнять по возможности вне влияния близости земли.
В экстремальных условиях из-за неустойчивости вертолета действует дестабилизирующий момент, стремящийся увеличить угловую скорость вращения. Как было сказано выше, к таким условиям относится висение с предельной массой, при пониженной плотности воздуха, с правым ветром больше допустимого, при уменьшении частоты вращения НВ.
В этих случаях возможно самопроизвольное вращение вертолета влево с опусканием носа, колебаниями по крену, потерей высоты.
При попадании в режим самопроизвольного вращения пилот должен выполнять следующие рекомендации:
- заход на посадку и зависание перед приземлением производить против ветра;
- если разворот влево начинается при достаточном запасе путевого управления, немедленно отклонить правую педаль, не превышая ограничений по угловой скорости разворота и минимальной частоте вращения НВ;
- если вращение продолжается при отклоненной до упора вперед правой педали, необходимо уменьшить общий шаг НВ и отклонить РЦШ влево. Уменьшение шага НВ приводит к уменьшению реактивного момента НВ, a отклонение РЦШ влево способствует возникновению левого скольжения, при котором тяга РВ возрастает и противодействует развороту;
- если неуправляемое вращение происходит с возрастающей угловой скоростью 0,95...1,05 рад/с (50-60 град/с), необходимо выключить двигатели и выполнить посадку на режиме самовращения НВ;
- если висение осуществляется с грузом на внешней подвеске, необходимо сбросить груз, после чего вращение замедляется.
В полете с поступательной скоростью вертолет обладает путевой статической устойчивостью во всем диапазоне скоростей полета, углов атаки и скольжения. Степень путевой статической устойчивости значительно изменяется в зависимости от скорости полета и угла атаки фюзеляжа. С ростом скорости путевая устойчивость, особенно при наличии киля и отрицательных углах атаки и фюзеляжа, увеличивается.
Однако при больших скоростях полета и углах скольжения запас путевой устойчивости уменьшается вследствие срыва потока на лопастях рулевого винта. При возникновении на крейсерских скоростях полета углов скольжения более 40° РВ и киль работают в условиях развитого срыва потока - вертолет может стать неустойчивым в путевом отношении и войти в самопроизвольное вращение с нарастающей угловой скоростью. Подобная зона путевой неустойчивости существует и при малых скоростях полета.
Полет на режиме самовращения НВ выполняется при положительных углах атаки фюзеляжи. При этом РВ и киль находятся в потоке, возмущенном и заторможенном фюзеляжем, что снижает их эффективность. Этим объясняется резкое уменьшение статической путевой устойчивости, что является причиной боковых колебаний вертолета.
2.6. Динамическая устойчивость бокового движения
Характер бокового движения вертолета определяется соотношением запасов его статической поперечной и путевой устойчивости, а также инерционными и демпфирующими свойствами.
На висении и малых скоростях полета (до ~40 км/ч) боковое движение вертолета Ми-8 колебательно неустойчиво, так как на этих режимах взаимосвязь движений по крену и рысканию невелика, а движение по крену является неустойчивым. Колебания по крену являются незатухающими и имеют период 8...10 с. Это позволяет пилоту своевременно вмешиваться в управление и устранять случайно возникшие колебания.
При увеличении поступательной скорости полета, вплоть до максимальной, характеристики боковой динамической устойчивости существенно улучшаются. Это объясняется увеличением запасов поперечной и путевой статической устойчивости, усилением взаимосвязи движений по крену и рысканию, улучшением демпфирующих свойств НВ, РВ, киля и фюзеляжа. При этом колебания по углам крена и рыскания имеют период 3….7 с и носят затухающий характер.
Боковые колебания вертолета вызывают нарастающие колебания по тангажу. Поэтому вертолет Ми-8 является динамически неустойчивым на большинстве эксплуатационных режимов. При всяком нарушении равновесия и балансировки возникает пространственное колебательное движение вертолета с возрастающей амплитудой, медленный уход с исходного режима полета в нисходящую спираль.
Основным способом придания вертолету Ми-8 динамической устойчивости является использование автопилота АП-34Б. Автопилот АП-34Б предназначен для автоматической стабилизации угловых положений вертолета и барометрической высоты полета. Автопилот работает совместно с электрогидравлическими рулевыми агрегатами типа КАУ-30Б и РА-6А (по путевому управлению), включенными в систему управления по дифференциальной схеме, т.е. на органы управления могут воздействовать как пилот при помощи обычных рычагов управления, так и автопилот. При этом автопилот воздействует на малый цилиндр рулевого агрегата, который является как бы "раздвижной тягой", включенной в систему управления.
Отклонения от заданных параметров движения вертолета по углам крена и тангажа с авиагоризонта (АГК-ЗК), по углу курса с курсовой системы, по скорости полете с корректора-задатчика приборной скорости (КЗСП), по высоте полета с корректора-задатчика высоты (КЗВ) в виде электрических сигналов, поступающих на вход автопилота,
преобразовываются, усиливаются и поступают на органы управления, которые возвращают вертолет на исходный режим полета.
Выводы;
I. Вертолет Ми-8 является нейтральным в боковом отношении на режиме висения. Инерционная и аэродинамическая связь движений по крену и курсу отсутствует.
2. При увеличении поступательной скорости запас боковой динамической устойчивости вертолета увеличивается, связь движений по крену и курсу усиливается.
3. При нарушении установленных ограничений по массе, частоте вращения и боковому ветру вертолет Ми-8 становится колебательно неустойчивым на висении и малых скоростях полета. Путевая неустойчивость вертолета может привести к неуправляемому вращению вертолета влево.
4. Вертолет Ми-8 с выключенным автопилотом динамически неустойчив.