
Защита вида (е) состоит в том, что в электрооборудовании, не имеющем нормально искрящихся частей, принят ряд мер, препятствующих опасному нагреву, возникновению электрического искрения и дуг.








Плотность тока в контактных соединениях ограничивается до 2,5 А/мм2, устанавливается более низкая допустимая температура обмоток.
Факторы, влияющие на выбор электрооборудования
для взрывоопасных зон
При выборе электрооборудования для взрывоопасных зон определяют категорию и группу, к которым может быть отнесена взрывоопасная смесь; класс и границы взрывоопасных зон относительно вероятности образования взрывоопасных смесей в нормальном и аварийном режимах; а также температуру, влажность и химическую агрессивность среды, в которой должно работать электрооборудование.
По установленной категории выбирают электрооборудование во взрывонепроницаемой оболочке по допустимым зазорам в соединениях, а по группе – длительно допустимый нагрев электрооборудования, исключающий возможность самовоспламенения взрывоопасных смесей. При этом максимальная температура его поверхности не должна превышать температуры воспламенения взрывоопасной смеси.
Надежность и безопасность эксплуатации выбранного взрывозащищенного электрооборудования обеспечивается при условии соответствия уровня и вида взрывозащиты классу взрывоопасной зоны, а также категории и группе взрывоопасной смеси.
Согласно требований ПУЭ наиболее жесткие требования предъявляются к электрооборудованию во взрывоопасных зонах класса В-1, а самые низкие требования – к электрооборудованию в менее взрывоопасных зонах класса В-1б, где допускается применение электрооборудования общего назначения с соответствующей степенью защиты оболочки.
18. РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА
С ИСПОЛЬЗОВАНИЕМ УПРАВЛЯЕМЫХ ВЫПРЯМИТЕЛЕЙ
В большинстве случаев применения управляемых выпрямителей средней и большой мощности приходится решать задачу управления средним значением выпрямленного напряжения Ud. Соотношение между средним Ud и амплитудным Um значениями напряжения:
Ud =  Um ≈ 0.637 Um .
Um ≈ 0.637 Um .
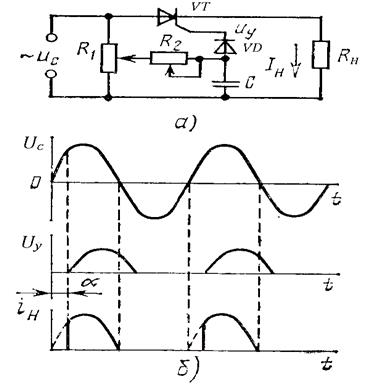
Основными элементами современных управляемых выпрямителей являются тиристоры или силовые транзисторные ключи. На рис.18.1 представлена схема простейшего однофазного однополупериодного выпрямителя на тиристоре.
Управление напряжением на выходе управляемого выпрямителя сводится к управлению во времени моментом отпирания тиристора VT. Это осуществляется за счет сдвига фаз между анодным напряжением и напряжением Uy , подаваемым на управляющий электрод тиристора. Такой сдвиг фаз называют углом управления и обозначают α (рис.18.1,б), а способ управления называют фазовым. Управление величиной α осуществляют с помощью фазовращающей R2C-цепи, которая позволяет изменять угол α от 0 до 90°. При этом выпрямленное напряжение регулируют от наибольшего значения до его половины. Резистором R1 изменяют напряжение, подаваемое на управляющий электрод тиристора. Диод VD обеспечивает подачу на управляющий электрод положительных однополярных импульсов.

 |
Оптимальной формой управляющих сигналов для тиристоров является короткий импульс с крутым фронтом. Такая форма позволяет уменьшить нагрев управляющего электрода тиристора, а также обеспечить за счет высокой крутизны управляющего импульса четкое отпирание тиристора. Для формирования подобных импульсов и их сдвига во времени служат специальные импульсно-фазовые системы управления. Изменение угла управления осуществляют ручным или автоматическим способом, что обеспечивает изменение выпрямленного напряжения в требуемых пределах.
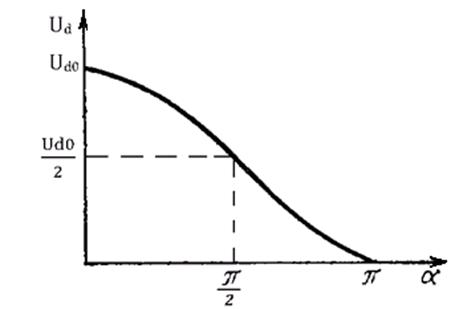
Среднее значение выпрямленного напряжения при угле управления α≠0 без учета потерь определяют из выражения
где Ud 0 =  U 2 – среднее значение напряжения на нагрузке при α=0, U 2 – действующее напряжение фазы вторичной обмотки трансформатора.
U 2 – среднее значение напряжения на нагрузке при α=0, U 2 – действующее напряжение фазы вторичной обмотки трансформатора.
Зависимость Ud = f (α) называют характеристикой управления выпрямителя. Эта зависимость для нагрузочного устройства с активным сопротивлением представлена на рис.18.2.

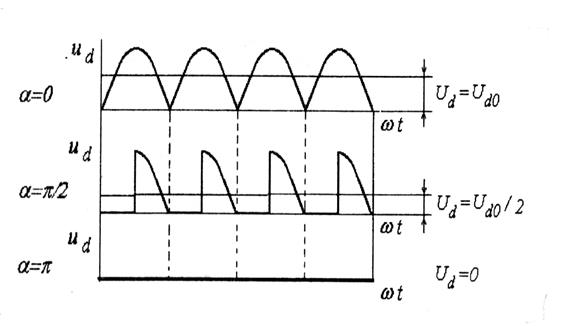 |
При двухполупериодной схеме выпрямителя (см. раздел 10) формы выходного напряжения Ud при различных углах управления (от α=0 до α=π ) имеют вид, представленный на рис.18.3.
|
Управляемые выпрямители используются в регулируемых электроприводах постоянного тока в буровых установках (в электроприводе ротора, буровой лебедки, бурового насоса, регулятора подачи долота).
Кроме того, они используются в полупроводниковых преобразователях частоты в качестве промежуточного звена постоянного тока.
19. ЧАСТОТНО – РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ
В последние годы на предприятиях нефтяной и газовой отраслей внедряются частотно-регулируемые электроприводы (ЧРП) с использованием преобразователей частоты (ПЧ). Это способствует повышению эффективности добычи и транспорта нефти и газа и снижению энергозатрат.
Частотный способ регулирования скорости асинхронных двигателей (АД) является самым экономичным в сравнении с другими известными способами.
Возможность регулирования скорости асинхронного двигателя изменением частоты следует из выражения скорости ω0 идеального холостого хода:
 ,
,
где  — частота напряжения обмотки статора;
— частота напряжения обмотки статора;
 — число пар полюсов двигателя.
— число пар полюсов двигателя.
Меняя частоту  напряжения обмотки статора, можно получать разные скорости идеального холостого хода. При неизменном напряжении источника питания
напряжения обмотки статора, можно получать разные скорости идеального холостого хода. При неизменном напряжении источника питания  с уменьшением частоты
с уменьшением частоты  резко увеличиваются ток намагничивания и ток статора. Магнитная система двигателя насыщается. В результате существенно увеличиваются электрические и магнитные потери. Для повышения технико-экономических показателей двигателя при изменении частоты необходимо регулировать амплитуду напряжения как функцию от частоты
резко увеличиваются ток намагничивания и ток статора. Магнитная система двигателя насыщается. В результате существенно увеличиваются электрические и магнитные потери. Для повышения технико-экономических показателей двигателя при изменении частоты необходимо регулировать амплитуду напряжения как функцию от частоты  и момента нагрузки М. Зависимость
и момента нагрузки М. Зависимость  от частоты
от частоты  и момента нагрузки М выражает закон частотного управления.
и момента нагрузки М выражает закон частотного управления.
Закон частотного управления, установленный М.П. Костенко, обеспечивает сохранение постоянной перегрузочной способности двигателя:
Достоинство частотного управления состоит в том, что управление двигателем по закону М.П. Костенко позволяет поддерживать КПД равным номинальному, при этом КПД не зависит от скорости.
В полной мере законы частотного управления вида реализуются в замкнутых системах автоматического управления электроприводами. В разомкнутых системах управления напряжение обычно регулируется в функции от частоты:  .
.
Если скорость вращения двигателя регулируется при условии постоянства момента нагрузки, напряжение источника питания необходимо изменять пропорционально изменению частоты тока  (базовый закон частотного управления). При этом мощность увеличивается пропорционально нарастанию скорости вращения.
(базовый закон частотного управления). При этом мощность увеличивается пропорционально нарастанию скорости вращения.
Центробежные насосы относятся к турбомеханизмам, для которых момент сопротивления пропорционален квадрату скорости вращения (  ). В этом случае целесообразно использовать следующий закон частотного регулирования
). В этом случае целесообразно использовать следующий закон частотного регулирования  .
.
Таким образом, для осуществления частотного способа регулирования скорости АД необходимо иметь преобразователь частоты с возможностью раздельного изменения амплитуды и частоты выходного напряжения.
Преобразователи частоты, предназначенные для частотно-регулируемых асинхронных электроприводов, подразделяются по типу связи с питающей сетью на преобразователи частоты с непосредственной связью и двухзвенные преобразователи частоты (ДПЧ) с промежуточным звеном постоянного или переменного тока.
В регулируемом асинхронном электроприводе могут найти применение ПЧ с непосредственной связью на полностью управляемых полупроводниковых тиристорах. Двухоперационный или полностью управляемый тиристор позволяет не только отпирать его с помощью управляющего импульса, но также и запирать.
Преобразователь частоты (ПЧ) состоит из следующих основных частей: понижающего и повышающего трансформаторов Тр1 и Тр2, управляемого тиристорного выпрямителя (В), фильтра звена постоянного напряжения (Ф), инвертора напряжения (ИН). Инверторы – это электронные устройства, преобразующие постоянное напряжение в переменное. В электроприводах технологических установок используются асинхронные двигатели как низковольтные (напряжение ниже 1000 вольт), так и высоковольтные – 6, 10 киловольт. Поэтому преобразователи частоты должны быть как низковольтными, так и высоковольтными. Однако высоковольтные преобразователи частоты сложны в исполнении и дороги, и в случаях для высоковольтных двигателей могут использоваться низковольтные преобразователи с двойной трансформацией напряжения. В этом случае в состав преобразователя помимо понижающего трансформатора Тр1 вводят и повышающий Тр2, который трансформирует выходное напряжение ПЧ в рабочее напряжение двигателя (М).
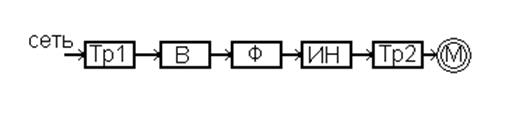
Структурная схема преобразователя частоты
Фильтр Ф звена постоянного тока служит для сглаживания пульсаций выпрямленного напряжения.
Включение между питающей сетью и двигателем полупроводниковых преобразователей частоты, обеспечивающих управление и регулирование скорости асинхронных двигателей, может оказать существенное влияние на показатели качества электроэнергии питающей сети, например, на синусоидальность напряжения.
Известно, что ПЧ является источником совокупности гармонических составляющих напряжения или тока различных частот, причём их количество и удельный вес каждой в спектре зависят от типа и комплектации ПЧ.
Искажение синусоидальности напряжения вызывает дополнительный нагрев электродвигателя и преждевременное старение изоляции его обмоток. Кроме того, преобразователь частоты является источником электромагнитных высокочастотных помех.
Наличие электромагнитных помех обусловлено тем, что частота переключений транзисторов в инверторе напряжения составляет 15...20 кГц. Высокий уровень высокочастотных помех может генерироваться и выходным кабелем ППЧ, поэтому кабель между ППЧ и двигателем выполняется экранированным с заземлением на концах.
Полупроводниковые преобразователи частоты находят все большее применение в регулируемых электроприводах переменного тока технологических установок нефтяной и газовой отраслей. Например, использование частотно-регулируемого электропривода в погружных установках для добычи нефти с электроцентробежными насосами позволяет регулировать отбор нефти из скважин, поддерживая соответствие между притоком и откачкой жидкости.
Начато использование частотно-регулируемых электроприводов в буровых установках, в установках для добычи нефти с электроцентробежными насосами, в станках-качалках, в насосных и компрессорных установках магистральных нефте – и газопроводов.
20. ЭЛЕКТРОПРИВОД ГЛУБИННОНАСОСНЫХ ШТАНГОВЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ (СТАНКОВ – КАЧАЛОК)
Область экономически целесообразного применения того или иного вида насосной установки определяется суточной производительностью скважины и глубиной подвески насоса. Для станков-качалок (СК) эта область характеризуется суточной производительностью от 5 до 50 м3/сут. при глубине подвески до 1600 м или производительностью 300 м3/сут. при меньшей глубине подвески. Плунжерный глубинный насос 1 станка-качалки подвешивается на колонне насосных труб 3 (рис. 20.1). Плунжеру 2 насоса сообщается возвратно-поступательное движение с передачей энергии от балансира (7) станка-качалки
при помощи колонны штанг 4. Станок-качалка имеет асинхронный электродвигатель 12 с короткозамкнутым ротором с повышенным пусковым моментом, обеспечиваемым за счет специальной конструкции обмотки ротора: двойной беличьей клетки или глубокопазной обмотки. Кроме ЭД станок-качалка имеет редуктор 10. Колонна штанг станка-качалки на устье скважины через шток соединена с головкой балансира 6. Балансир с помощью шатунов связан с кривошипами, вал которых через редуктор и клиноременную передачу 11 связан с ЭД. Изменяя расстояние от кривошипа до места присоединения шатунов к кривошипу, можно регулировать ход полированного штока и длину хода плунжера насоса. Балансирный 13 и кривошипный 14 противовесы служат для уравновешивания нагрузки подвижной системы станка-качалки и двигателя при ходе колонны штанг вниз и вверх.
Рис. 20.1 Конструктивная схема станка-качалки.
Частоту качаний балансира можно изменять путем установки шкивов различных диаметров у клиноременной передачи. Мощность ЭД для привода станков-качалок находится в диапазоне 1,7-45 кВт.
Режим работы ЭД станка-качалки характеризуется резко пульсирующей нагрузкой и непрерывными переходными процессами. Характер изменения нагрузки (момента сопротивления и мощности нагрузки) на валу ЭД определяется законом изменения скорости и усилия в точке подвеса штанг к балансиру. Этот закон близок к синусоидальному. Одна полуволна синусоиды соответствует движению головки балансира вверх, вторая полуволна – движению вниз (рис.20.2). За один цикл работы насоса или одно качание график нагрузки имеет два максимума и два минимума. Максимальное значение скорости соответствует средним, а минимальные – крайним положениям балансира. При ходе плунжера вверх к точке подвеса штанг приложена статическая нагрузка, создаваемая весом столба жидкости над плунжером, весом самих штанг и силами трения. Эта нагрузка постепенно возрастает в начальный период хода вверх, благодаря демпфирующему действию упругих деформаций штанг и труб. При ходе плунжера вниз статическая нагрузка в точке подвеса действует в направлении движения и разгружает двигатель, она определяется весом штанг за вычетом веса занимаемого ими объема жидкости и сил трения.
Результирующий момент сопротивления, приведенный к валу двигателя, зависит от положения кривошипа. Амплитудные значения момента сопротивления и мощности нагрузки на валу ЭД значительно отличаются друг от друга при ходе плунжера вверх и вниз. Такой режим работы невыгоден для ЭД станка-качалки и для питающей его сети. Для ЭД он не выгоден потому, что при преодолении пиков нагрузки при движении плунжера вверх двигатель перегружается, а при снижении его мощности во время движения плунжера вниз двигатель оказывается недогруженным и работает с пониженным значением коэффициента полезного действия (КПД) и коэффициента мощности cosj. Для того чтобы при преодолении пиков нагрузки двигатель не перегревался выше допустимой температуры, приходится завышать мощность ЭД, тогда при движении плунжера вниз недогрузка ЭД становится еще больше. Для питающей сети такой режим невыгоден, потому что пики нагрузки приводят к колебаниям тока в сети и колебаниям напряжения. Поэтому станок-качалка должен быть уравновешен, при этом выравнивают нагрузку электродвигателя при ходе плунжера вверх и вниз.
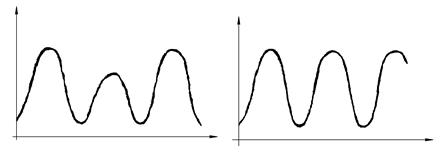
Рис.20.2. Графики изменения мощности нагрузки на валу двигателя:
а) неуравновешенный станок-качалка;
б) уравновешенный станок-качалка.
Уравновешивание осуществляется специальными противовесами, которые устанавливают либо на плече балансира, противоположном точке подвеса штанг, либо на кривошипах. В первом случае уравновешивание называют балансирным, а во втором случае – кривошипным, применяют и комбинированное уравновешивание. Противовесы создают дополнительные моменты относительно оси вращения кривошипа. Эти моменты являются движущими при ходе плунжера вверх и тормозящими при ходе плунжера вниз. В первую половину цикла при ходе плунжера вверх ЭД разгружается за счет дополнительных моментов, создаваемых противовесами, а во вторую половину цикла он догружается. Величины противовесов выбирают так, чтобы обеспечивалось равенство моментов сопротивления или мощностей нагрузки ЭД за оба полуцикла. В последние годы в практику нефтедобывающих предприятий начинают внедряться методы контроля балансировки по сигналам с датчиков тока или датчиков мощности, устанавливаемых в цепи питания электропривода станка-качалки. В этом случае показания амперметра во времени будут изменяться, достигая максимальных значений при средних положениях балансира. При идеальном уравновешивании должно соблюдаться условие:
I в. max = I н. max,
где I в. max – пиковое значение тока статора при движении плунжера вверх; I н. max – пиковое значение тока статора при движении плунжера вниз.
Степень неуравновешенности e станка-качалки определяется формулой
Cчитается, что станок-качалку следует доуравновешивать, если  .
.
Электродвигатели для станков-качалок
Используемые в электроприводе станка-качалки асинхронные электродвигатели с короткозамкнутым ротором серии 4А, 5А, АИР и др. имеют повышенный пусковой момент  , который обеспечивается за счет специальной конструкции обмотки ротора (это может быть или глубокопазная обмотка при соотношении размеров сечения 10:1 или двойная беличья клетка), причем внутренняя клетка выполнена из меди, а наружная из латуни, имеющей большее удельное сопротивление, чем медь. Для повышения пускового момента используется эффект вытеснения тока на поверхность при пуске электродвигателя. Двухскоростные асинхронные двигатели серии 5А, используемые для малодебитных скважин, имеют синхронные частоты вращения 500 и 1000 об/мин и мощности на валу от 11 до 25 кВ.
, который обеспечивается за счет специальной конструкции обмотки ротора (это может быть или глубокопазная обмотка при соотношении размеров сечения 10:1 или двойная беличья клетка), причем внутренняя клетка выполнена из меди, а наружная из латуни, имеющей большее удельное сопротивление, чем медь. Для повышения пускового момента используется эффект вытеснения тока на поверхность при пуске электродвигателя. Двухскоростные асинхронные двигатели серии 5А, используемые для малодебитных скважин, имеют синхронные частоты вращения 500 и 1000 об/мин и мощности на валу от 11 до 25 кВ.
В момент пуска двигателя, когда скольжение S=1, а частота тока f2 в роторе равна частоте тока f 1 сети (f2 = f1) и имеет наибольшее значение, индуктивное сопротивление нижней части каждого стержня глубокопазной обмотки ротора (рис.20.3,а) значительно больше верхней. Объясняется это тем, что нижняя часть стержня сцеплена с большим числом магнитных силовых линий поля рассеяния. Различие индуктивных сопротивлений различных частей стержня приводит к тому, что ток вытесняется в наружный слой паза. При этом почти весь ток ротора проходит по верхней части стержня, поперечное сечение которой намного меньше сечения всего стержня. Это равноценно увеличению активного сопротивления стержня ротора, что способствует росту пускового момента двигателя и ограничению пускового тока. По мере нарастания скорости вращения ротора при разгоне скольжение S уменьшается, а частота тока в роторе убывает (f2 = Sf1). В связи с этим уменьшается индуктивное сопротивление обмотки ротора x2 ≡ f2. Распределение плотности тока по высоте стержня обмотки ротора в этом случае становится более равномерным, что ведет к уменьшению активного сопротивления ротора. При работе двигателя с номинальной частотой вращения, когда f2 =1-2 Гц << f1, процесс «вытеснения» тока практически прекращается и двигатель работает как обычный короткозамкнутый. Номинальный момент асинхронного двигателя прямо пропорционален квадрату напряжения сети Uc:
Mном.двиг.º U  .
.
Эффект вытеснения тока хорошо проявляется при пазах ротора бутылочной формы. В этом случае «вытеснение» тока происходит в верхнюю часть паза, имеющую меньшее сечение, а следовательно, большее активное сопротивление. Применение пазов бутылочной формы позволяет сократить высоту пазов ротора, а следовательно, уменьшить диаметр ротора по сравнению с глубокопазным ротором.
Еще лучшими пусковыми свойствами обладают асинхронные двигатели с двумя короткозамкнутыми клетками на роторе (рис.20. 3, б): рабочей клеткой 2, стержни которой расположены в нижнем слое, и пусковой клеткой 1, стержни которой расположены в верхнем слое, ближе к воздушному зазору.
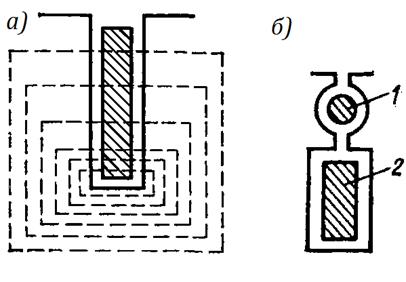
Рис.20.3 Сечение стержней обмоток ротора с
улучшенными пусковыми характеристиками
Стержни пусковой клетки обычно выполняют из латуни или бронзы – материалов, обладающих более высоким, чем у меди, активным сопротивлением. Индуктивное сопротивление рассеяния пусковой клетки 1 невелико, так как ее стержни расположены вблизи воздушного зазора и к тому же с двух сторон имеют воздушные щели (рис.20.3, б). Стержни рабочей клетки выполняют из меди, и по сравнению со стержнями пусковой клетки они имеют большее сечение. Это обеспечивает рабочей клетке малое активное сопротивление. Но зато индуктивное сопротивление рабочей клетки больше, чем у пусковой, особенно в начальный период пуска, когда частота тока в роторе f2 =50 Герц.
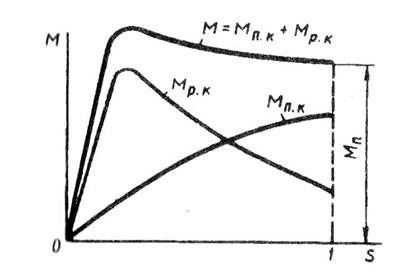 |
В момент пуска двигателя ток ротора проходит в основном по верхней (пусковой) клетке, обладающей малым индуктивным сопротивлением. При этом плотность тока в стержнях пусковой клетки намного больше плотности тока в стержнях рабочей клетки 2. Повышенное активное сопротивление этой клетки обеспечивает двигателю значительный пусковой момент при пониженном пусковом токе. По мере увеличения частоты вращения ротора уменьшается частота тока в роторе, при этом индуктивное сопротивление рабочей клетки уменьшается, и распределение плотности тока в стержнях пусковой и рабочей клеток становится почти одинаковым. В итоге происходит перераспределение вращающего момента между клетками: если в начальный период пуска момент создается главным образом токами пусковой клетки, то по окончании периода пуска вращающий момент создается в основном токами рабочей клетки. Так как активные сопротивления клеток ротора неодинаковы, то зависимость момента двигателя от скольжения M = f(s) этих клеток изображается разными кривыми (рис.20.4). Максимальное значение момента пусковой клетки вследствие ее повышенного активного сопротивления смещено в сторону скольжений, близких к единице (пуск двигателя). Вращающие моменты от обеих клеток направлены в одну сторону, поэтому результирующий момент двигателя равен сумме моментов пусковой Мп.к и рабочей Мр.к клеток
М = Мп.к + Мр.к.
Рис.20.4. Механическая характеристика двухклеточного
асинхронного двигателя
Кроме асинхронных двигателей с короткозамкнутым ротором на станках-качалках могут быть установлены синхронные двигатели, которые позволят регулировать коэффициент мощности сети cosj при эксплуатации в режиме перевозбуждения, что будет способствовать снижению энергозатрат.
Выбор мощности ЭД станков-качалок
При выборе мощности ЭД возможны две задачи.
Первая задача возникает при уточнении мощности ЭД станка-качалки. Такой случай возможен при отклонении дебита скважины от запланированного, а также при изменении режима работы скважины. В этом случае подбор ЭД целесообразно производить по нагрузочной диаграмме мощности или момента. Режим работы ЭД длительный с циклически изменяющейся нагрузкой. Для выбора мощности ЭД достаточно рассмотреть один цикл работы (одно качание) и привести переменную нагрузку к неизменной стандартной. При этом используется один из методов: метод эквивалентного момента, эквивалентной мощности или эквивалентного тока.
График нагрузки одного цикла, например график изменения мощности, разбивается на несколько временных интервалов длительностью t1, t2 и т.д. В каждом временном интервале определяется среднее значение мощности P.
Эквивалентную или эффективную мощность Рэ электродвигателя определяют по формуле
где t 1 , t 2 – время интервалов;
Р1, Р2 – средние значения мощности в интервале.
Требуемая номинальная мощность электродвигателя Рном.двиг. определяется по условию
Рном.двиг.  Рэ .
Рэ .
График нагрузки на валу двигателя может быть получен по показаниям ваттметра, установленного в одной из фаз статора двигателя.
Вторая задача возникает при расчете мощности ЭД для вновь вводимой скважины. В этом случае для определения эффективной мощности нагрузки обычно используют эмпирические формулы с учетом величины подачи насоса, глубины подвески насоса и технических параметров станка-качалки.
Выбранный по условиям нагрева двигатель не во всех случаях будет удовлетворять требованиям работы в приводе станка-качалки. Он должен удовлетворять условиям пуска станка-качалки и обеспечивать преодоление пиков нагрузочного момента при работе установки. При пуске станка-качалки ЭД должен развивать момент, обеспечивающий преодоление статического момента сопротивления и момента необходимого для разгона до установившейся скорости. Статический момент сопротивления при пуске превышает момент при установившемся режиме за счет увеличенных сил трения, обусловленных заеданием движущихся частей двигателя, выжиманием смазки, а также возможным наличием песчаных пробок.
Протекание пускового процесса, обычно не превышающего 10 с, зависит от начального положения кривошипа и от того, как изменяется нагрузка после пуска.
Для нормальной работы СК (при хорошем уравновешивании) кратность максимального момента λ= Mmax /Мном должна находиться в пределах 1,8-1,9. Обычно значение λ у АД станков-качалок составляет 2,1-2,8, что обеспечивает надежную работу электропривода с перегрузками и при снижении напряжения в сети.
21. ЭЛЕКТРОПРИВОД БЕСШТАНГОВЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ С ЭЛЕКТРОЦЕНТРОБЕЖНЫМИ НАСОСАМИ (ЭЦН)
Установки с ЭЦН используются для эксплуатации высокодебитных (400-500  ), а также горизонтальных и наклонных скважин.
), а также горизонтальных и наклонных скважин.
Установка состоит из следующих основных элементов (рис.21.1).
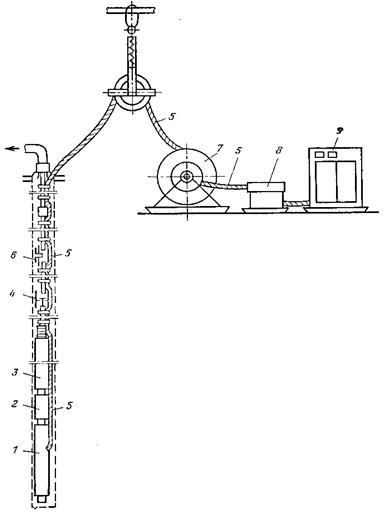
Рис.21.1. Основные элементы бесштанговой насосной установки с ЭЦН
Погружной центробежный насос 3 с сетчатым фильтром и специальный погружной электродвигатель 1 (ПЭД) с гидрозащитой 2 подвешены на насосных трубах. Установка имеет также питающий кабель 5, прикреплённый к насосным трубам и намотанный на барабан 7, трансформатор 8 и станцию управления 9. В колонне труб выше насоса установлен обратный клапан 4, предназначенный для удерживания столба жидкости и облегчения условий последующего пуска. Выше обратного клапана установлен спускной клапан 6, обеспечивающий слив жидкости при подъеме агрегата. Серийно выпускаются ЭЦН большого количества типоразмеров с подачей от 40 до 500 м3 в сутки и напором от 400 до 1500 м.
Погружной электродвигатель ЭЦН представляет собой высокоскоростной трехфазный асинхронный двигатель на 3000 об/мин мощностью от 10 до 125 кВт в герметичном исполнении с короткозамкнутым ротором, помещенный в стальную трубу, заполненную трансформаторным маслом при избыточном давлении масла до 0,2 МПа, и рассчитанный для работы при температуре пластовой жидкости до 90 0С. Двигатель имеет диаметры: 103, 117, 123, 130, 138 мм. Малый диаметр двигателя приводит к увеличению его длины, достигающей 7-8 метров. Питающее напряжение погружных электродвигателей имеет разброс, поэтому для питания таких установок применяют специальные трансформаторы, обеспечивающие регулирование напряжения.
Статор ПЭД состоит из отдельных магнитных пакетов, разделенных вставками из немагнитного материала. Двухполюсная обмотка статора выполнена общей для всех его секций. Ротор также состоит из отдельных секций, каждая из которых создает свою короткозамкнутую цепь. Между секциями ротора установлены промежуточные подшипники. Маловязкое масло циркулирует внутри двигателя под действием турбинки, насаженной на вал двигателя, что обеспечивает более интенсивное охлаждение двигателя с выравниванием температур. Для защиты погружного электродвигателя от пластовой жидкости применяется гидрозащита. Для управления электроприводом установки применяют различные виды станции управления, например, станции управления ШГС-5805, СУРС-1 (с частотным регулированием электропривода) и др.
Подвод электрической энергии к погружному электродвигателю осуществляется маслонефтестойким бронированным трехжильным плоским и круглым (в начале линии) кабелем с резиновой или полиэтиленовой изоляцией. Применение плоского кабеля на конечном участке линии обусловлено необходимостью уменьшить поперечные размеры погружного устройства.
Для питания ПЭД применяют специальные масляные (М) трансформаторы серии ТМП или ТМПН (ПН – погружные насосы), мощностью от 40 до 400 кВА.
При нескольких скважинах в кусте используют комплектную трансформа- торную подстанцию КТППН, содержащую несколько трансформаторов. К этой подстанции может быть подключено до 6 погружных электродвигателей.
Мощность погружного электродвигателя насосной установки с ЭЦН должна соответствовать параметрам выбранного насоса, а его подача и напор – оптимальному дебиту скважины и полному напору, требуемому для подъема жидкости.
Электродвигатель получает питание по кабельной линии достаточно большой длины (до 2 км) и относительно небольшого сечения. Поэтому фактический пусковой ток ПЭД обычно меньше паспортного значения пускового тока двигателя и фактический пусковой момент двигателя также ниже его номинальной величины. Поэтому после выбора погружного электродвигателя необходимо произвести его проверку по пусковому моменту M ПУСК, исходя из условия
где  - начальный момент сопротивления насоса, который не превышает значения (0,3÷0,35) Мном. при наличии в устройстве обратного клапана, который удерживает столб жидкости над насосом, что облегчает условия пуска.
- начальный момент сопротивления насоса, который не превышает значения (0,3÷0,35) Мном. при наличии в устройстве обратного клапана, который удерживает столб жидкости над насосом, что облегчает условия пуска.
Удельный расход электроэнергии при добыче нефти центробежными погружными электронасосами выше, чем при добыче станками-качалками, что обусловлено более низким КПД самого центробежного насоса.
22. Схемы управления асинхронным двигателем
с короТкозамкнутым ротором
В данном разделе рассматриваются простейшие схемы релейно-контакторного управления прямым пуском и реверсированием (изменением направления вращения ротора) асинхронного двигателя с короткозамкнутым ротором. Для изучения работы электропривода используются принципиальные электросхемы. При изучении и чтении принципиальных электрических схем, на которых показаны соединение элементов и требуемая последовательность коммутационных операций, необходимо учитывать их особенности:
- каждая схема имеет две электрические цепи: силовую, которая обычно выделяется жирными линиями, и цепь управления, изображаемая более тонкими линиями;
- все элементы электрических аппаратов обозначаются в соответствии с ГОСТ 2.755-87;
- элементы схемы в соответствии с их функциями обозначаются буквами; они разбиты по видам на группы, имеющие обозначения одной буквы (например, конденсаторы обозначаются буквой C); для уточнения вида элементов применяют двухбуквенные коды;
- примеры буквенных обозначений элементов схемы (двухбуквенный код):
выключатель кнопочный – SB; контактор, магнитный пускатель – KM; трансформатор тока – TA; амперметр – PA; вольтметр – PV; реле времени – KT; реле электротепловое – KK; диод – VD; тиристор – VS; предохранитель плавкий – FU;
- примеры условных обозначений элементов на электрических схемах:

- обмотка контактора, реле, магнитного пускателя;
 - замыкающие контакты реле, контактора, магнитного пускателя;
- замыкающие контакты реле, контактора, магнитного пускателя;
 - размыкающие контакты реле, контактора, магнитного пускателя;
- размыкающие контакты реле, контактора, магнитного пускателя;

- кнопка самовозврата с замыкающим контактом;

- кнопка самовозврата с размыкающим контактом;

- реле электротепловое;

- замыкающие контакты с выдержкой времени при срабатывании (используются в реле врмени);
 - замыкающие контакты с выдержкой времени при возврате;
- замыкающие контакты с выдержкой времени при возврате;
- разные элементы одного аппарата показывают в различных электрических цепях, например, обмотка контактора KM обычно включена в цепь управления, его контакты включены в силовую цепь;
- принадлежность элементов к одному аппарату устанавливается по буквенному и цифровому обозначению, например, все элементы первого контактора могут быть обозначены KM1, а обозначение KM1.2 расшифровывается как второй контакт первого контактора;
- на схеме все элементы аппарата (контакты, кнопки) показаны при отсутствии токов в обмотках и ненажатых кнопках.
Электрическая схема пуска нереверсивного асинхронного двигателя
В схемах релейно-контакторного управления пуском асинхронного двигателя используются контакторы, магнитные пускатели, электротепловые реле и пусковые кнопки.
Контакторами называются электромагнитные выключатели, предназначенные для коммутирования силовых электрических цепей с помощью электромагнитов. Контакторы снабжаются системой гашения дуги. Помимо силовых контактов в контакторах предусмотрены вспомогательные блокировочные контакты (блок-контакты), служащие для различных переключений в цепях управления приводом.
Электромагнитные контакторы переменного тока широко используются в
магнитных пускателях — устройствах дистанционного управления электроприводом и автоматической защиты от перегрузок асинхронных электродвигателей с помощью электротепловых реле. Пускатели делятся на нереверсивные, имеющие один контактор, и реверсивные, имеющие два контактора.
Электротепловое реле содержит биметаллический элемент, представляющий собой две механически скреплённые металлические пластины из металлов с различными температурными коэффициентами расширения. При перегрузке цепи ток увеличивается и нагревает биметаллический элемент. Он изгибается в сторону пластины с малым коэффициентом линейного расширения, что приводит к размыканию контактов.
Схема прямого пуска асинхронного двигателя (рис. 22.1) используется при небольших мощностях порядка 30 ÷ 40 кВт. Для двигателей большей мощности используются средства ограничения пусковых токов: включение пусковых реостатов в цепь обмотки фазного ротора или пуск при пониженном напряжении.
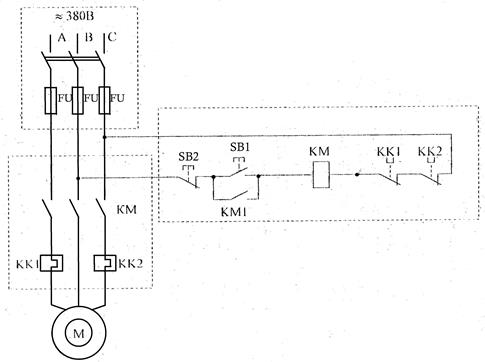
Рис. 22.1. Схема пуска нереверсивного асинхронного двигателя
После нажатия на кнопку SB1 (кнопка “Пуск”) происходит подача напряжения на катушку контактора KM. Якорь контактора притягивается к сердечнику, происходит замыкание силовых контактов КМ в цепи обмотки статора асинхронного двигателя M, и двигатель пускается в ход. Одновременно в цепи управления замкнётся вспомогательный блок-контакт KM1, шунтируя пусковую кнопку. Кнопку SB1 можно отпустить и пружина вернёт контакт кнопки в разомкнутое состояние. При этом подача напряжения на катушку контактора будет осуществляться по параллельной цепи через блок-контакт KM1. Выключить двигатель можно нажатием кнопки SB2 (кнопка “Стоп” – обычно красного цвета). Для повторного пуска следует снова нажать на пусковую кнопку SB1.
В данной схеме защита двигателя от перегрузок обеспечивается двумя электротепловыми реле KK1 и KK2. Следует иметь в виду, что из-за тепловой инерции тепловые реле не обеспечивают защиту от токов короткого замыкания. Для защиты от токов короткого замыкания в схеме предусмотрены плавкие предохранители FU. При перегрузке электродвигателя, когда момент сопротивления на валу ротора будет выше допустимого, ток статора возрастёт, биметаллическая пластина электротеплового реле при нагреве током статора изогнётся и произойдёт размыкание контактов KK1 и KK2 в цепи управления. Катушка контактора обесточится и двигатель остановится. После охлаждения биметаллической пластины нажатием кнопки тепловое реле возращается в исходное состояние.
При коротком замыкании происходит расплавление плавких вставок предохранителей FU, цепь электропитания двигателя разрывается и двигатель остановится. После замены плавких вставок предохранителей может быть выполнен повторный пуск двигателя.
Данная схема управления также обеспечивает “нулевую” защиту двигателя. Если напряжение в питающей сети исчезнет или понизится до50÷60% от номинального значения, электромагнит контактора не сможет удержать якорь в притянутом к сердечнику состоянии, якорь отпадает, размыкая силовые и вспомогательные контакты, и обесточенный двигатель остановится. После восстановления напряжения до нормального значения двигатель самопроизвольно не запустится. Для повторного пуска двигателя необходимо снова нажать на пусковую кнопку SB1.
Электрическая схема прямого пуска реверсивного асинхронного двигателя
Для обеспечения реверса двигателя (изменения направления вращения) необходимо поменять местами в клеммной коробке любые две фазы питающего электрокабеля, оставив третью фазу нетронутой (рис.22.2). Реверс электродвигателя обеспечивается с помощью реверсивного пускателя (рис.22.3.).


 а) ° ° ° клемма двигателя
а) ° ° ° клемма двигателя
фаза А В С
 |
n2 (направление
вращения
 питающий ротора)
питающий ротора)
электрокабель
Рис. 22.2. Схема изменения направления вращения ротора асинхронного двигателя

 б) ° ° °
б) ° ° °

 фаза С В А n2 (направление
фаза С В А n2 (направление
вращения
ротора)
питающий
электрокабель
Рис. 22.2. Продолжение
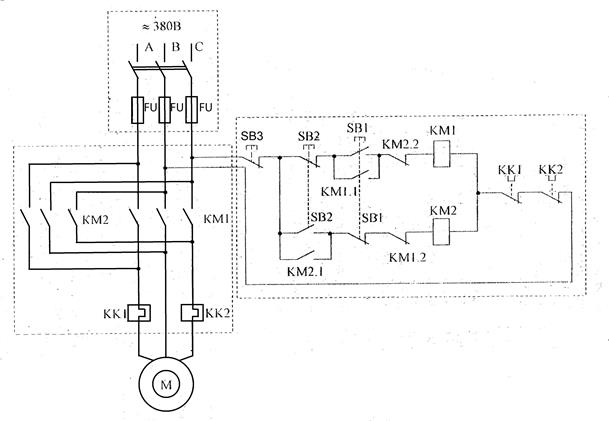
Рис. 22.3. Схема пуска реверсивного асинхронного двигателя
После кратковременного нажатия на кнопку SB1 для включения электродвигателя в направлении “Вперёд” (по часовой стрелке) срабатывает контактор КМ1. Контакты КМ1 контактора в силовой цепи замкнутся и будет подано напряжение на обмотку статора двигателя М, после чего ротор двигателя начнёт вращаться, например, по часовой стрелке. Затем кнопку SB1 можно отпустить, так как питание катушки контактора обеспечивается через блок-контакт КМ1.1 контактора КМ1.
Для того чтобы не произошло короткое замыкание в силовой цепи при случайном одновременном нажатии пусковых кнопок SB1 и SB2 (“Вперёд” и “Назад”) вспомогательный размыкающий контакт КМ1.2 контактора КМ1 включён в цепь катушки контактора КМ2, обеспечивающего включение двигателя в направлении “Назад” (против часовой стрелки). Этот контакт обеспечивает блокировку (размыкание) цепи управления пуском двигателя в направлении “Назад”, что делает невозможным пуск двигателя сразу в двух направлениях и предотвратит аварийную ситуацию. Для повышения надёжности эксплаутации электродвигателя кроме описанной выше электрической блокировки применяют механическую блокировку. В этом случае пусковая кнопка SB1 кроме замыкающего контакта имеет размыкающий контакт (на схеме соединены пунктирной линией). Тогда при пуске двигателя в направлении “Вперёд” цепь включения в направлении “Назад” блокируется за счёт размыкающего контакта кнопки SB1.
Для остановки двигателя следует нажать на кнопку SB3 (“Стоп”) и схема вернётся в исходное состояние. При перегрузке двигателя срабатывают электротепловые реле КК1 и КК2. В данной схеме “нулевая защита” при снижении напряжения работает аналогично схеме пуска нереверсивного двигателя.
Чтобы включить двигатель в обратном направлении против часовой стрелки (“Назад”) необходимо нажать на кнопку SB2. Для предотвращения попытки включить двигатель сразу в двух направлениях (“Назад” и “Вперёд”) предусмотрены электрическая и механическая блокировки, для чего соответствующие размыкающие контакты КМ1.2 и КМ2.2 и SB1 и SB2 включены в цепи катушек контакторов КМ1 и КМ2.
23. ЭЛЕКТРООБОРУДОВАНИЕ БУРОВЫХ УСТАНОВОК
Существуют следующие способы вращательного бурения: роторное, турбинное, электробурение.
При роторном бурении вращение долота (разрушающего инструмента) осуществляется с помощью колонны бурильных труб. Нагрузка на долото создается частью веса бурильных труб.
При турбинном способе бурения долото вращается с помощью турбины турбобура. При этом турбина вращается движением жидкости под давлением.
При использовании электробуров вращение долота осуществляется электродвигателем, опускаемым в скважину.
В комплект буровой установки (БУ) входят:
1. Буровая лебедка (БЛ) для подъема и опускания бурильных труб, а также осуществления вспомогательных операций.
2. Буровые насосы, которые служат для создания в скважине циркуляции промывочной жидкости, которая очищает забой и выносит выбуренную породу на поверхность, а при турбинном бурении передает энергию турбобуру.
3. Ротор, который передает вращение долоту при роторном бурении, поддерживает на весу колонну бурильных труб (КТБ) и воспринимает реактивный крутящий момент.
4. Автоматические регуляторы подачи долота, обеспечивающие плавную и равномерную подачу долота в процессе бурения.
Требования к электроприводам
Требования к электроприводу ротора буровой установки:
- должен иметь мягкую механическую характеристику,
- минимальный момент инерции вращающихся частей,
- малую кратность максимального момента,
- иметь реверс (изменение направления вращения).
Перечисленные требования позволяют избежать поломки долота в аварийных ситуациях.
К электроприводу буровой лебедки, работающему в режиме подъема колонны бурильных труб, предъявляются следующие требования:
- должен иметь возможность регулирования скорости двигателя в необходимом диапазоне в режиме постоянной мощности;
- достаточную перегрузочную способность для выполнения операций, связанных с ликвидацией аварий и расхаживанием колонны обсадных труб;
- обеспечивать работоспособность в повторно-кратковременном режиме с изменяющейся от цикла к циклу относительной продолжительностью включения.
Интенсивность ускорения в процессе разгона при подъеме колонны зависит от пусковой характеристики электропривода и определяется превышением момента, развиваемого двигателем в процессе пуска, над моментом сопротивления. Наибольшая величина превышения ограничивается максимальным моментом, который может развить двигатель. Для обеспечения быстрого с максимально допустимым ускорением разгона колонны двигатель БЛ должен обладать высоким пусковым моментом в процессе всего разгона и высокой перегрузочной способностью. Для асинхронных двигателей, работающих в повторно-кратковременном режиме, кратность максимального момента должна быть не менее λ=2,5…2,8. Это может быть обеспечено включением реостатов в цепь фазного ротора.
При наличии уменьшающегося момента статического сопротивления на валу двигателя лебедки наибольшая производительность лебедки и полная загрузка электропривода может быть достигнута, если по мере подъема труб скорость подъема увеличивается.
Спуск колонны бурильных труб (КТБ) и обсадных труб может осуществляться с помощью индивидуального приводного электродвигателя постоянного тока, используемого в режиме рекуперативного или динамического торможения, при постоянной мощности.
Рекуперативное торможение с отдачей энергии в сеть осуществляется в случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его эдс больше приложенного напряжения. Ток меняет направление, и момент становится тормозным.
Динамическое торможение происходит при отключении якоря двигателя от сети и замыкании его на резистор (генераторный режим работы). При этом обмотка возбуждения подключена к сети. Энергия генератора выделяется на резисторе в виде тепла. Управление моментом и скоростью осуществляется регулированием тока возбуждения.
Кроме того, в процессе спуска могут быть использованы электромагнитные тормоза ферропорошкового типа (рис.23.1).
Основными параметрами, характеризующими работу бурового насоса, являются его подача (Q) и напор (p), развиваемый при заданной подаче. Мощность, требуемая для привода насоса, определяется произведением (Q∙p).
В буровых установках в основном применяются поршневые насосы со сменными цилиндровыми втулками, позволяющими в определенных пределах изменять подачу насоса.
В начале бурения скважины давление, создаваемое насосом, невелико. Однако по мере углубления скважины вследствие увеличения гидравлического сопротивления труб возрастает и давление на выходе насоса, которое ограничено прочностью деталей насоса. Поэтому, начиная с определенной глубины скважины, подачу (Q) насоса необходимо ограничивать. Оптимальный режим работы насоса характеризуется постоянством развиваемой мощности, равной номинальной: p ∙ Q = const .
Приблизиться к режиму постоянства мощности можно при нерегулируемом электроприводе за счет применения сменных втулок разного диаметра, а при регулируемом электроприводе можно, если плавно регулировать подачу насоса путем изменения скорости вращения электродвигателя.
Целесообразность использования регулируемого электропривода является одним из основных требований к приводу бурового насоса. Скорость следует регулировать не менее чем на 20% вниз от номинальной при бурении и до 50% при восстановлении циркуляции раствора. Следует также учитывать то, что электродвигатель насоса работает в длительном режиме без бросков нагрузки, но с частыми пусками и остановками. Поэтому между двигателем и насосом для оперативного управления целесообразно использовать электромагнитную муфту.
Электродвигатель бурового насоса должен иметь высокую перегрузочную способность, так как при бурении на выходе насоса может кратковременно создаваться повышенное давление. По пусковому моменту двигатель бурового насоса не проверяется, так как его запуск производится практически на холостом ходу.
Подача долота - это последовательное опускание верхней точки КБТ в процессе бурения, при этом скорость подачи долота должна быть равна скорости разбуривания. При ручной подаче бурильщик периодически растормаживает барабан лебедки по показаниям амперметра (току статора) и индикатору веса КБТ. Задача плавной и равномерной подачи долота решается применением автоматических регуляторов. При этом долото подается на забой автоматически в зависимости от параметров, характеризующих режим бурения, например, давления на забое или тока статора бурового двигателя.
В последние годы расширяются номенклатура и объемы производства буровых установок с дизель-электрическим приводом. Это позволяет решить проблему энергоснабжения удаленных от базы буровых установок, решить проблему повышения установленной мощности главных и вспомогательных приводов на буровых установках и др. вопросы. У дизель-электрического привода в качестве первичных двигателей для вращения генераторов используются двигатели внутреннего сгорания (дизели).
Электроприводы с электромагнитными муфтами и тормозами
Электромагнитные муфты предназначены для передачи вращающего момента от ведущего вала к ведомому. Существуют следующие виды электромагнитных муфт: электромагнитные муфты скольжения, индукционные электромагнитные муфты и электропорошковые муфты.
В приводе буровых установок электромагнитные муфты применяются в качестве электротормоза буровой лебедки, для оперативного соединения приводного вала лебедки с двигателем, в качестве пусковой муфты в приводе лебедки от постоянно вращающихся двигателей (синхронных или асинхронных с короткозамкнутым ротором), для оперативного соединения бурового насоса с приводом, ограничения момента, передаваемого на ротор, регулирования частоты вращения ротора, регулирования подачи бурового насоса, для автоматизации подачи долота в процессе бурения.
Электромагнитные муфты в электроприводе буровой лебедки, устраняя скачкообразное изменение момента, обеспечивают плавный и интенсивный разгон привода. Кроме того, электромагнитные муфты позволяют в наибольшей степени осуществить унификацию буровых установок с дизельным и электрическим приводами.
В электроприводе лебедки электромагнитные муфты устанавливаются между приводными двигателями и трансмиссией. Во время спуско-подъемных операций приводной двигатель работает в режиме постоянного вращения. Привод лебедки пускают включением электромагнитной муфты путем подачи тока в обмотку возбуждения. Привод с электромагнитными муфтами обеспечивает непрерывный переход от натяжения талевой системы к подъему долота, остановку колонны бурильных труб на заданной высоте.
Основное преимущество электромагнитных тормозов в приводе буровой лебедки заключается в возможности плавного регулирования в широких пределах тормозного момента.
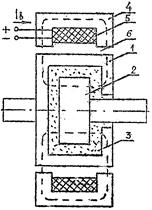
В воздушном зазоре между двумя вращающимися частями порошковой (ЭПМ) муфты (ведущей 1 и ведомой 2) помещен железный ферромагнитный зернистый порошок 3, смешанный с сухим (тальк, графит) или жидким (трансформаторное масло) наполнителем (рис. 23.1а).
Сердечник индуктора 4 с обмоткой возбуждения 5 неподвижен и отделен от ведущей части воздушным зазором 6. Из-за того, что ни на ведущей, ни на ведомой частях ЭПМ нет обмоток, повышается надежность муфты из-за отсутствия скользящих контактов.
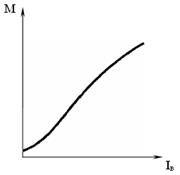
Когда в обмотку возбуждения 5 индуктора 4 подается ток возбуждения I в, то образуется магнитное поле, силовые линии которого замыкаются через сердечники частей 1,2 муфты, и зазор 3 с наполнителем между ними. Под действием магнитного поля ферромагнитные зерна располагаются вдоль силовых линий, т.е. поперек воздушного зазора. Вязкость среды между ведущей и ведомой частями возрастает. Появляется сила, обеспечивающая сдвиг ведомой части муфты относительно ведущей и создание вращающего момента. Чем больше ток возбуждения, тем больший момент может передать муфта ведомому валу (рис.23.1,б).
а) б)
 | |||||
 | |||||
 | |||||
|
Рис. 23.1 Электромагнитная порошковая муфта:
а) конструкция; б) зависимость момента М муфты от тока возбуждения Iв
Если момент сопротивления на ведомом валу превысит максимальный момент, развиваемый муфтой, то начнется проскальзывание ведомой части муфты относительно ведущей, что приведет к нагреву порошка. При температуре около 300ºС объем порошка сильно увеличится и может произойти заклинивание муфты.
Для получения тормозных свойств достаточно закрепить неподвижно одну из частей ЭПМ, а другую связать с валом, который необходимо тормозить. В момент начала торможения включается обмотка возбуждения, что вызывает затягивание ферромагнитной смеси в зазор и появление силы, тормозящей вал. Энергия торможения выделяется в виде тепла, поэтому электропорошковый тормоз и электромагнитные муфты необходимо интенсивно охлаждать.
Современные электроприводы буровых установок
С начала 90-х годов прошлого столетия на БУ преобладающее применение находит регулируемый электропривод постоянного тока системы «тиристорный преобразователь – двигатель постоянного тока» (ТП-ДПТ), который заменил другие, морально устаревшие системы. Возможность регулирования скорости и момента обеспечивает оптимальное ведение технологических процессов бурения. Регулирование скорости привода осуществляется изменением напряжения на выходе тиристорного преобразователя.
Диапазон мощностей главных электродвигателей БУ для бурения скважин на глубины 3000-6500 м находится в пределах 500-1000 кВт. Для торможения лебедки при спуске бурильной колонны в скважину применяются специально созданные для этой цели мощные электромагнитные тормоза. При использовании для торможения электродвигателей лебёдки электропривод лебёдки выполняется реверсивным.
Принципиально новым шагом в развитии электропривода БУ является применение усовершенствованных силовых модулей тиристорных преобразователей и цифровых устройств управления. Цифровые системы управления обеспечивают достаточно высокое качество регулирования и переходных процессов, большую гибкость в настройке и управлении приводами.
В ближайшие годы сохраняется целесообразность применения на буровых установках данного вида электропривода.
В последние годы активизируются работы по применению на БУ частотно-регулируемого электропривода переменного тока. Цель проводимых работ состоит в том, что частотно-регулируемый электропривод по техническим характеристикам должен достигнуть показателей электропривода постоянного тока при конкурентоспособных стоимостных показателях. Основным преимуществом такого электропривода является применение асинхронных двигателей с короткозамкнутым ротором. Асинхронные двигатели значительно надежнее двигателей постоянного тока благодаря отсутствию щеточно-коллекторного аппарата и меньшему влиянию окружающей среды на сопротивление изоляции (в связи с отсутствием открытых токоведущих частей). Однако для регулируемых электроприводов переменного тока требуется применение двигателей специальной конструкции, рассчитанных на питание от преобразователей частоты.
Список литературы
1. Электротехника: учебник для вузов / А.С. Касаткин, М.В. Немцов.-11-е изд., стер. – М.: Издательский центр «Академия», 2008. – 544 с.
2. Электротехника: учебник для неэлектротехнических спец. вузов / Зайдель Х.Э., Коген-Далин В.В., Крымов В.В. и др. / под ред. В.Г. Герасимова. - 3 изд., перераб. и доп. – М.: Высш. шк., 1985.- 480 с.
3. Общая электротехника и электроника: учеб. пособие /Лопатин В.П. – Уфа: Издательство УГНТУ, 2003.−70с.
4. Кацман М.М. Электрические машины: учебник для учащихся электротехн. спец. техникумов. - 2-е изд., перераб. и доп. – М.: Высш. шк., 1990. – 463с.
5. Титаны электротехники : Очерки жизни и творчества / Я.А. Шнейберг. – М.: Издательство МЭИ, 2004.
6. Методические указания по разделу «Асинхронные двигатели» дисциплины «Электротехника и электроника» (Мировоззренческий аспект) / Шнейберг Я.А., Морозов Д.Н. – М.: Моск. энерг. ин-т, 1988. – 20 с.
7. Электротехника: учеб. пособие для вузов/ Б.А. Волынский, Е.Н. Зейн, В.Е. Шатерников. – М.: Энергоатомиздат, 1987.- 528 с.
8. Сборник задач с решениями по общей электротехнике: учеб. пособие для студентов неэлектрических специальностей вузов/ под. ред. В.К.Пономаренко. – М.: «Высшая школа», 1972.
9. Основы промышленной электроники: учебник для неэлектротехнических спец. вузов/ В.Г. Герасимов, О.М. Князьков, А.Е. Краснопольский, В.В. Сухоруков/ под ред. В.Г. Герасимова. – 3-е изд., перераб. и доп. – М.: Высш. шк., 1986.- 336 с.
10. Электротехника: учеб. пособие/ Ф. Г. Китунович, С. Д. Зинчук. –Мн.:ЗАО «Техноперспектива», 2004. – 357 с.
11. Шабанов В.А. Проектирование электроснабжения установок и предприятий нефтяной отрасли: учеб. пособие. – Уфа: Изд-во УГНТУ, 2009.-224с.
12. Электроизмерительные приборы и их применение: учеб. пособие / В. Г. Сергеев. – М.: Высш. шк., 1989.
13. Энергосберегающий асинхронный привод: учеб. пособие для студ. высш. учеб. заведений/ И.Я. Браславский, З.Ш. Ишматов, В.Н. Поляков. – М.: Издательский центр «Академия», 2004. – 256с.
14. Основы электроники: курс лекций/ Л.Н.Латышев. – Уфа: Изд-во «Реактив», 2008. – 384 с.
15. Абрамов Б.И., Парфёнов Б.М., Кожаков О.И. и др. Современный электропривод постоянного тока для буровых установок // Электротехника. – 2009. – №1. – С. 3-8.
16. Абрамов Б.И., Коган А.И., Бреслав Б.М. Частотно-регулируемый электропривод буровых установок БУ-4200 / 250 // Электротехника. – 2009. – №1. – С. 8.
17. Шабанов В.А. Основы регулируемого электропривода основных механизмов бурения, добычи и транспорта нефти: учеб. пособие. – Уфа: Изд-во УГНТУ, 2009. – 156 с.
18. Недолугий С.В. О преимуществах применения частотно-регулируемых электроприводов// Энергетик. – 2010. – №9. – С. 21.
19. Ершов М.С., Яризов А.Д. Электрооборудование и станции управления технологических установок механизированной добычи нефти: учеб. пособие для вузов. – М.: ООО «Недра-Бизнесцентр», 2008. – 124 с.
20. Электротехнические установки и комплексы в нефтегазовой промышленности: учебник для вузов/Б.Г. Меньшов, М.С. Ершов, А.Д. Яризов. – М.: Недра, 2000. – 487 с.: ил.
21. Шабанов В.А., Кочинашвили В.А. Электропривод, электрооборудование и электроснабжение промысловых насосных установок добычи нефти. – Уфа: Изд. Уфим. нефт. ин-та, 1993. -80с.
22. Электрооборудование и электропривод установок бурения: учеб. пособие / В.А.Шабанов. – Уфа: Уфим. нефт. ин-т, 1992. -75с.
23. Меньшов Б.Г., Суд И.И., Яризов А.Д. Электрооборудование нефтяной промышленности: учеб. для техникумов. –М.: Недра, 1990.-365 с.: ил.
СОДЕРЖАНИЕ
| С. | ||
| ЭТАПЫ РАЗВИТИЯ ЭЛЕКТРОТЕХНИКИ……………… | 3 | |
| 1 | ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ…………… | 4 |
| 2 | ОБЩАЯ ХАРАКТЕРИСТИКА ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ………………………………………………………. | 9 |
| 3 | ЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ПОСТОЯННОГО ТОКА…………………………………… | 11 |
| 4 | ЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ ОДНОФАЗНОГО СИНУСОИДАЛЬНОГО ПЕРЕМЕННОГО ТОКА…… | 31 |
| 5 | ТРЕХФАЗНЫЕ ЦЕПИ……………………………………... | 50 |
| 6 | ТРАНСФОРМАТОРЫ……………………………………... | 56 |
| 7 | МАШИНЫ ПОСТОЯННОГО ТОКА……………………... | 63 |
| 8 | АСИНХРОННЫЕ МАШИНЫ…………………………….. | 69 |
| 9 | СИНХРОННЫЕ МАШИНЫ………………………………. | 78 |
| 10 | ОСНОВЫ ЭЛЕКТРОНИКИ……………………………….. | 82 |
| 11 | ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ И ПРИБОРЫ……….... | 95 |
| 12 | ЭЛЕКТРОПРИВОД МАШИН И МЕХАНИЗМОВ………. | 107 |
| 13 | ЭЛЕКТРОСНАБЖЕНИЕ ПОТРЕБИТЕЛЕЙ……………... | 110 |
| 14 | МАГНИТНЫЕ ЦЕПИ И ЭЛЕКТРОМАГНИТНЫЕ УСТРОЙСТВА………………………………………………… | 112 |
| 15 | НЕЛИНЕЙНЫЕ ЭЛЕКТРИЧЕСКИЕ ЦЕПИ……………... | 117 |
| 16 | ПЕРЕХОДНЫЕ ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ……………………………………………………….... | 119 |
| 17 | ХАРАКТЕРИСТИКА ЭЛЕКТРООБОРУДОВАНИЯ ВО ВЗРЫВООПАСНЫХ ЗОНАХ В НЕФТЯНОЙ И ГАЗОВОЙ ПРОМЫШЛЕННОСТИ (НГП)……………………………. | 123 |
| 18 | РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ ПОСТОЯННОГО ТОКА…………………………………………………… | 129 |
| 19 | ЧАСТОТНО – РЕГУЛИРУЕМЫЕ ЭЛЕКТРОПРИВОДЫ … | 132 |
| 20 | ЭЛЕКТРОПРИВОД ГЛУБИННОНАСОСНЫХ ШТАНГОВЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ (СТАНКОВ – КАЧАЛОК)……………………………………. | 134 |
| 21 22 23 | ЭЛЕКТРОПРИВОД БЕСШТАНГОВЫХ УСТАНОВОК ДЛЯ ДОБЫЧИ НЕФТИ С ЭЛЕКТРОЦЕНТРОБЕЖНЫМИ НАСОСАМИ (ЭЦН)…………………………………………. СХЕМЫ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ……………………... ЭЛЕКТРООБОРУДОВАНИЕ БУРОВЫХ УСТАНОВОК …. СПИСОК ЛИТЕРАТУРЫ……………………………………… | 141 143 148 154 |
Учебное издание
Лопатин Виталий Прокопьевич
ЭЛЕКТРОТЕХНИКА, ОСНОВЫ ЭЛЕКТРОНИКИ
И ЭЛЕКТРООБОРУДОВАНИЕ
Подписано в печать ________ . Бумага офсетная №2. Формат 60х84 1/16.
Гарнитура «Таймс». Печать трафаретная. Усл.печ. л. 9,94. Уч.-изд. л. 8,83.
Тираж 300 экз. Заказ ___ .
Издательство Уфимского государственного нефтяного технического университета
Типография Уфимского государственного нефтяного технического университета
Адрес издательства и типографии:
450062, Республика Башкортостан, г.Уфа, ул. Космонавтов, 1 