Потери преобразуются в теплоту, что ведет к нагреву машины. Они разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.








Магнитные потери  в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания. Магнитные потери в сердечнике ротора малы (f2=2 - 4 Гц) и их в практических расчетах не учитывают.
в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания. Магнитные потери в сердечнике ротора малы (f2=2 - 4 Гц) и их в практических расчетах не учитывают.
 Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке.
Работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
Механические потери  – это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (
– это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (  ).
).
Величина добавочных потерь мала и её принимают равной 0,5% от подводимой к двигателю мощности.
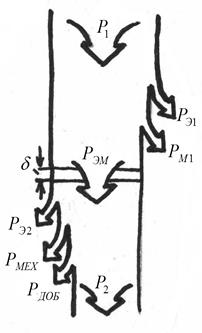
 Из энергетической диаграммы асинхронного двигателя видно, что часть подводимой к двигателю мощности
Из энергетической диаграммы асинхронного двигателя видно, что часть подводимой к двигателю мощности  (
(  – число фаз) затрачивается в статоре на магнитные
– число фаз) затрачивается в статоре на магнитные  и электрические
и электрические  потери. Оставшаяся после этого электромагнитная мощность
потери. Оставшаяся после этого электромагнитная мощность  передается через воздушный зазор
передается через воздушный зазор  на ротор, где частично расходуется на электрические потери
на ротор, где частично расходуется на электрические потери  и преобразуется в полную механическую мощность. Часть этой мощности идет на покрытие механических
и преобразуется в полную механическую мощность. Часть этой мощности идет на покрытие механических  и добавочных потерь
и добавочных потерь  , а оставшаяся часть этой мощности
, а оставшаяся часть этой мощности  - это полезная мощность двигателя.
- это полезная мощность двигателя.
КПД асинхронного двигателя определяется по формуле  .
.
Электрические потери в обмотках и являются переменными потерями, так как их величина зависит от нагрузки двигателя. Переменными являются также и добавочные потери.
Магнитные  и механические потери практически не зависят от нагрузки.
и механические потери практически не зависят от нагрузки.
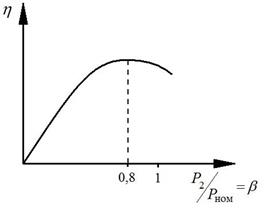
КПД асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке  . При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (
. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (  ) он резко убывает, что объясняется значительным ростом переменных потерь.
) он резко убывает, что объясняется значительным ростом переменных потерь.
КПД трехфазных асинхронных двигателей общего назначения тем выше, чем больше мощность двигателя. Например, для двигателей мощностью более 10 кВт  . КПД является одним из основных параметров асинхронного двигателя, определяющим его экономичность в процессе эксплуатации. Двигатели с низким КПД работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности.
. КПД является одним из основных параметров асинхронного двигателя, определяющим его экономичность в процессе эксплуатации. Двигатели с низким КПД работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности.
Коэффициент мощности асинхронных двигателей
Кроме активной мощности Р1 двигатель потребляет реактивную мощность Q1, в основном необходимую для образования вращающегося магнитного поля. Коэффициент мощности определяется по формуле
 .
.
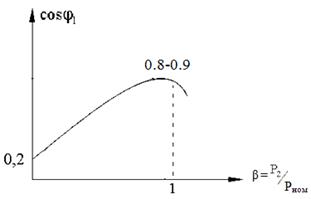
Кривая зависимости коэффициента мощности от коэффициента загрузки двигателя
При холостом ходе  имеет малое значение (не превышает 0,2), так как активная мощность расходуется только на относительно небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет практически постоянное значение. Наибольшие значения (0,8-0,9) получаются в области нагрузок близких к номинальной.
имеет малое значение (не превышает 0,2), так как активная мощность расходуется только на относительно небольшие потери в статоре и небольшие механические потери, а реактивная мощность имеет практически постоянное значение. Наибольшие значения (0,8-0,9) получаются в области нагрузок близких к номинальной.
9. СИНХРОННЫЕ МАШИНЫ
Устройство синхронной машины отличается от устройства асинхронной машины конструкцией ротора и тем, что частоты вращения магнитного поля статора n1 и ротора n2 у синхронной машины одинаковы, то есть n1=n2. Из-за равенства частот вращения n1 и n2 машина называется синхронной. Синхронные машины обладают свойством обратимости, то есть могут работать как генератором, так и двигателем.
В настоящее время большинство электрических станций оснащено трехфазными синхронными генераторами, которые приводятся во вращение паровыми или гидравлическими турбинами, а также двигателями внутреннего сгорания. Синхронные двигатели применяются там, где требуется обеспечение постоянства частоты вращения, например, на компрессорных и нефтеперекачивающих станциях.
Синхронная машина состоит из неподвижного статора, аналогичного статору асинхронного двигателя и ротора, вращающегося внутри статора. Ротор представляет собой электромагнит постоянного тока, он имеет обмотку возбуждения, запитанную постоянным током от выпрямителя или от генератора постоянного тока, называемого возбудителем.
Одним из способов передачи энергии на обмотку возбуждения является использование контактных колец, укрепленных на роторе, и щеток, а также установка на роторе генератора постоянного тока (возбудителя). Роторы синхронных машин бывают с явно выраженными и неявно выраженными полюсами. Роторы с явно выраженными полюсами применяют в гидрогенераторах (тихоходных машинах). Для быстроходных машин (турбогенераторов) используют ротор с неявно выраженными полюсами. В данном случае явнополюсная конструкция ротора неприменима из-за возможного разрушения в связи с большими центробежными силами.
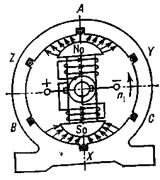
 На рис. 9.1,а изображена схема синхронной машины с явно выраженными полюсами. На статоре расположена трехфазная обмотка, к которой в режиме двигателя подводится трехфазное напряжение, а в режиме генератора подключается трехфазный приемник.
На рис. 9.1,а изображена схема синхронной машины с явно выраженными полюсами. На статоре расположена трехфазная обмотка, к которой в режиме двигателя подводится трехфазное напряжение, а в режиме генератора подключается трехфазный приемник.