
В основе работы асинхронного двигателя лежит вращающееся магнитное поле, создаваемое трехфазными токами в обмотке статора, и воздействие этого поля на токи, протекающие в обмотке ротора.








При протекании трехфазного тока по трехфазной обмотке статора возникает вращающееся магнитное поле (частота вращения n1), которое пересекает проводники обмотки ротора и наводит в них ЭДС в соответствии с законом электромагнитной индукции. В замкнутой обмотке ротора возникают токи. В результате взаимодействия этих токов с вращающимся полем на роторе возникают электромагнитные силы, направление которых определяется правилом левой руки. Совокупность этих сил создает электромагнитный вращающийся момент, приводящий ротор во вращение с частотой n2 < n1 в сторону вращения поля статора.
У асинхронного двигателя ротор вращается с несколько меньшей скоростью, чем поле статора, так как только при этом условии в проводниках ротора будет наводиться ЭДС, потечет ток и возникнет вращающий момент.
Двигатель называется асинхронным потому, что частота вращения ротора n2 не равна частоте вращения поля n1 статора, то есть n2 ≠ n1 .
Вращающееся поле переменного тока трехфазной цепи
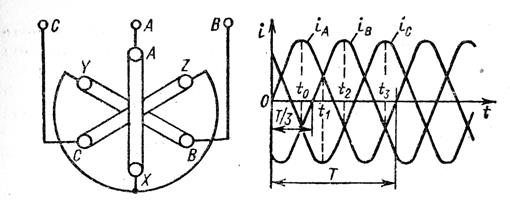
Получение вращающегося тока рассмотрим на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на  (рис. 7.6, а) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов и по обмоткам статора протекают токи
(рис. 7.6, а) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов и по обмоткам статора протекают токи  (рис. 7.6, б).
(рис. 7.6, б).
|
|
Рис. 7.6
В момент времени  ток в фазе A положительный (см. синусоиды токов), а в фазах B и С – отрицательный. Если ток положительный, то направление тока примем от начала к концу обмотки (обозначение знаком
ток в фазе A положительный (см. синусоиды токов), а в фазах B и С – отрицательный. Если ток положительный, то направление тока примем от начала к концу обмотки (обозначение знаком  в начале обмотки и знаком
в начале обмотки и знаком  в конце обмотки). Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля обмотки статора для момента времени . Ось результирующего магнитного поля с индукцией Bm рез расположена горизонтально (а).
в конце обмотки). Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля обмотки статора для момента времени . Ось результирующего магнитного поля с индукцией Bm рез расположена горизонтально (а).
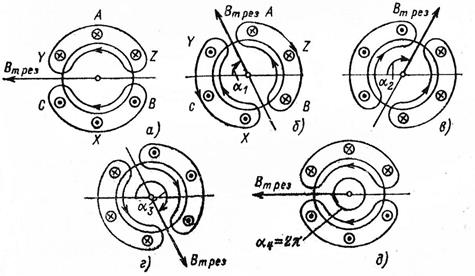
Рис. 7.7
На рис. 7.7, б показана картина магнитного поля в момент времени  , соответствующий изменению фазы тока на угол
, соответствующий изменению фазы тока на угол  . В этот момент времени токи в фазах A и B положительные, т.е. ток идет в них от начала к концу, а ток в фазе C – отрицательный, так как идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол . В моменты времени
. В этот момент времени токи в фазах A и B положительные, т.е. ток идет в них от начала к концу, а ток в фазе C – отрицательный, так как идет от конца к началу. Магнитное поле оказывается повернутым по часовой стрелке на угол . В моменты времени  и
и  ось магнитного поля соответственно повернется на углы
ось магнитного поля соответственно повернется на углы  и
и  (рис. 7.7, в, г). Через время, равное периоду T, ось поля займет первоначальное положение и поле сделает один оборот (рис. 7.7, д).
(рис. 7.7, в, г). Через время, равное периоду T, ось поля займет первоначальное положение и поле сделает один оборот (рис. 7.7, д).
Вращающий момент М асинхронного двигателя прямо пропорционален квадрату напряжения сети.  .
.
Различие частоты вращения магнитного поля статора n1 и частоты вращения ротора n2 определяется величиной, называемой скольжением S, которую выражают в долях единицы либо в процентах:
У асинхронных двигателей скольжение изменяется в пределах от 0 (при идеальном холостом ходе) до 1 (при пуске). Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением Sном. Для асинхронных двигателей общего назначения Sном.=2÷8%.
Большее значение скольжения соответствует двигателям большей мощности.
Частота вращения ротора n2 при известном скольжении определяется по формуле
 об/мин.
об/мин.
Частота вращения поля  , создаваемого трехфазной обмоткой статора:
, создаваемого трехфазной обмоткой статора:
 ,
,
где f – частота тока в сети;
р – число пар полюсов обмотки статора.
 .
.
Как следует из принципа действия асинхронного двигателя, обмотка ротора не имеет электрической связи с обмоткой статора. Энергия из обмотки статора передается в обмотку ротора магнитным путем.
Механическая характеристика асинхронного двигателя – это зависимость частоты вращения ротора n2 от момента М, развиваемого двигателем в установившемся режиме работы:
 .
.
Разновидностью механической характеристики является зависимость момента на валу двигателя от скольжения:
 .
.
|
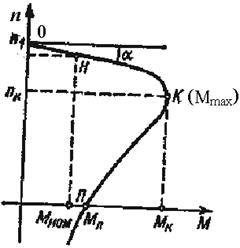
Рис. 8.2. Механическая характеристика асинхронного двигателя
В зоне от М = 0 до М≈0,9 Мmax. зависимость n2=f(М) близка к прямой линии. Участок ОН – рабочий участок. Участок НК соответствует механической перегрузке двигателя. Работа с моментом М > Мном. возможна лишь кратковременно из-за перегрева машины. Участок ОК соответствует статически устойчивой работе двигателя. На этом участке обеспечивается саморегулирование. Саморегулирование - это свойство автоматического установления равновесия между моментом сопротивления, создаваемым рабочим механизмом и моментом двигателя. Участок КП соответствует неустойчивой работе.
Механическая характеристика асинхронного двигателя является жесткой, так как в пределах от идеального холостого хода до номинальной нагрузки (nном. ,Мном.) частота вращения падает не более чем на 10 %.
Механическая характеристика может быть построена по паспортным данным электродвигателя с использованием формулы Клосса:
где  (критическое скольжение);
(критическое скольжение);
S – скольжение, изменяющееся (1– при пуске , 0 – при идеальном холостом ходе);
 (коэффициент перегрузочной способности электродвигателя).
(коэффициент перегрузочной способности электродвигателя).
Особенности пуска в ход асинхронных двигателей
В первый момент пуска частота вращения ротора n2 равна нулю и скольжение
 .
.
При пуске двигателя должны выполняться условия:
- вращающий момент должен быть больше момента сопротивления, создаваемого рабочим механизмом;
- пусковой ток Iпуск. не должен иметь большого значения (должно выполняться условие Iпуск ≤(5÷7) Iном.).
В зависимости от конструкции ротора, мощности двигателя и характера нагрузки применяются различные способы пуска:
- прямой пуск;
- пуск с использованием пусковых реостатов, включаемых в цепь обмотки фазного ротора;
- пуск при пониженном напряжении.
При прямом пуске обмотка статора двигателя сразу включается на полное напряжение сети. При этом пусковые токи в статоре и роторе имеют максимальные значения. По мере разгона ротора скольжение уменьшается и токи уменьшаются.
Бросок тока при пуске может вызвать значительное падение напряжения в сети, что может привести к остановке рядом работающих двигателей, так как момент, развиваемый ими, прямо пропорционален квадрату напряжения сети. Данный способ пуска получил наибольшее применение для двигателей мощностью до 50 кВт.
Пуск с включением пускового реостата в цепь фазного ротора обеспечивает наиболее благоприятное соотношение между пусковым моментом и пусковым током. Однако этот способ пуска связан со значительными потерями мощности в пусковом реостате.
При пуске двигателя при пониженном напряжении существуют следующие способы понижения напряжения:
- переключением обмотки статора с треугольника на звезду (фазное напряжение на статоре понижается в  раз);
раз);
- включением в цепь обмотки статора реактивных катушек (дросселей);
- подключением двигателя к сети через понижающий автотрансформатор.
Пуск двигателя при пониженном напряжении связан с понижением пускового момента ( ), что является существенным недостатком данного способа пуска.
Регулирование частоты вращения асинхронных двигателей
Из выражения, по которому можно рассчитать частоту вращения ротора  , следует, что n2 можно регулировать изменением какой-либо из трех величин: скольжения (S), частоты тока f в обмотке статора или числа пар полюсов (р) в обмотке статора (ступенчатое регулирование). В промышленности широко применяются частотно-регулируемые асинхронные двигатели.
, следует, что n2 можно регулировать изменением какой-либо из трех величин: скольжения (S), частоты тока f в обмотке статора или числа пар полюсов (р) в обмотке статора (ступенчатое регулирование). В промышленности широко применяются частотно-регулируемые асинхронные двигатели.
Потери и КПД асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе связано с потерями энергии, поэтому полезная мощность на выходе двигателя  всегда меньше мощности на входе
всегда меньше мощности на входе  на величину потерь
на величину потерь  :
:
 .
.