
2. Бортовой контур управления долговременных орбитальных станций. Режимы работы БКУ.








Билет №1
1. Виды долговременных КЛА.
По режиму работы различают следующие типы космических аппаратов[3]:
· искусственные спутники Земли — общее название всех аппаратов, находящихся на геоцентрической орбите, то есть вращающихся вокруг Земли
· автоматические межпланетные станции (космические зонды) — аппараты, осуществляющие перелёт между Землёй и другими космическими телами Солнечной системы; при этом они могут как выходить на орбиту вокруг изучаемого тела, так и исследовать их с пролётных траекторий, некоторые аппараты после этого направляются за пределы Солнечной системы
· космические корабли, автоматические или пилотируемые, — используются для доставки грузов и человека на орбиту Земли; существуют планы полётов на орбиты других планет
· орбитальные станции — аппараты, предназначенные для долговременного пребывания и работы людей на орбите Земли
· спускаемые аппараты — используются для доставки людей и материалов с орбиты вокруг планеты или межпланетной траектории на поверхность планеты (не надо)
· планетоходы — автоматические лабораторные комплексы или транспортные средства, для перемещения по поверхности планеты и другого небесного тела (не надо)
По наличию функции возвращения:
· Возвращаемые — предусматривают возвращения людей и материалов на Землю, осуществляя мягкую либо жёсткую посадку
· Невозвращаемые — при выработке ресурса обычно сходят с орбиты и сгорают в атмосфере
По выполняемым функциям выделяют следующие классы[4]:
· метеорологические
· навигационные
· спутники связи, телевещания, телекоммуникационные спутники
· научно-исследовательские
· геофизические
· геодезические
· астрономические
· дистанционного зондирования Земли
· разведывательные и военные спутники
· другие
Многие космические аппараты выполняют сразу несколько функций.
2. Нештатные ситуации. Типы НШС
Ситуации, которые приводят к существенному изменению плана работ с объектом управления называют нештатными.
Нештатные ситуации разделяют на расчётные и нерасчётные.
К классу расчётных (рассмотренных) нештатных ситуаций относятся ситуации, анализ влияния которых на ход полета проведён и предусмотрена специальная программа действий по ликвидации или компенсации их последствий.
В основу расчетных нештатных ситуаций положены расчетные отказы, рассмотренные при анализе работы систем КА до полета или возникавшие при наземных испытаниях систем и ранее проведенных полетах.
Нештатные ситуации, причиной которых является не рассмотренный заранее отказ, называют нерасчетными.
Нештатные ситуации, сложившиеся в результате появления неустранимых отказов и приводящие к нарушению требований безопасности экипажа или прекращению эксплуатации КА, называются аварийными.
Билет №2
1. Основные типы долговременных спутников связи. Обзор развития.
2. Задачи решаемые БКУ.
Бортовой комплекс управления - это совокупность систем КА, обеспечивающих управление функционированием КА как единого целого, бортовые системы которого связаны между собой информационными каналами.
При построении БКУ учитывают помимо функциональных и эксплуатационных требований, предъявляемых к КА, такие специфические требования, как:
• степень его автономности при выполнении полетных операций;
• возможность оперативного вмешательства в процессы управления БКУ со стороны НКУ.
• Бортовой комплекс управления обычно имеет четыре режима работы:
• управление от НКУ;
• автономное управление, т. е. управление всеми системами по внутренним программам БКУ;
• смешанный режим, при котором часть управляющих воздействий формирует и передает на борт НКУ, а часть формирует и исполняет БКУ;
• управление с участием экипажа.
Первый режим применяется при проведении особо ответственных полетных операций и при первых включениях режимов в полете, второй - вне зоны видимости станций слежения НКУ и в том случае, когда полетная операция уже отработана, третий - чаще первых двух, так как обладает наибольшей гибкостью.
В процессе полета БКУ взаимодействует с НКУ через каналы связи, по которым передаются необходимая для функционирования контура управления полетом командная, уставочная и программная, телефонная, телеграфная, телевизионная и телеметрическая информации, сигналы радиоконтроля орбиты и сверки времени.
Билет №3
1. Долговременные орбитальные станции различных поколений. Применение долговременных орбит станций для решения научных и прикладных задач.
1. Система передачи данных, как элемент НКУ. Типы используемых каналов связи.
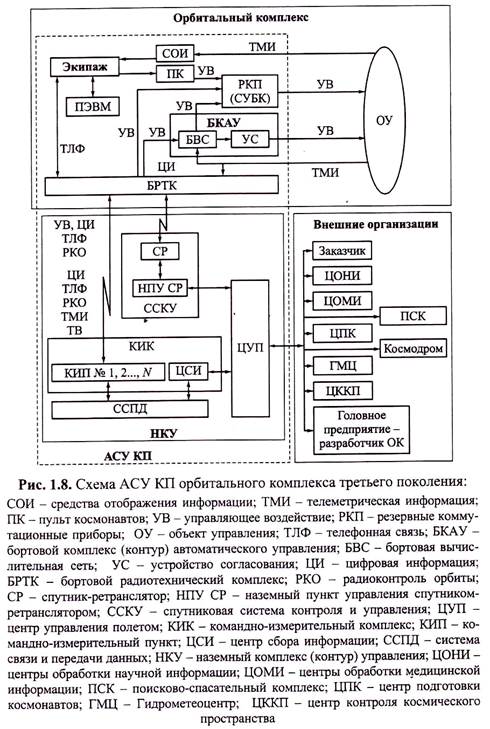
Наземный комплекс управления представляет собой систему (рис. 11.1) служб и средств, обладающую наиболее сложной в мире системой связи, включающей кабельные, радиорелейные и спутниковые каналы, большая часть которых арендуется у государственных и коммерческих организаций. Поступление с современных КА больших потоков информации (10 100 Мбит/с) требует включения в состав НКУ широкополосных каналов связи и быстродействующих ЭВМ для обработки этих потоков информации и объединения всех ЭВМ в единую вычислительную сеть с обеспечением межмашинного обмена. Для расширения возможностей слежения в НКУ входят подвижные станции слежения на кораблях, автомобильных и железнодорожных платформах и самолетах, используемые в период сложных и ответственных полетных операций, как, например, совместный полет космических кораблей «Союз» и «Аполлон», при котором в дополнение к сети стационарных станции слежения были задействованы три корабельные станции слежения НКУ «Авангард» (США), «Академик Сергей Королев» и «Космонавт Юрий Гагарин» (СССР), три самолетные станции слежения две в Южной Африке, одна в Австралии и одна передвижная станция в Ньюфаундленде.
Средства связи НКУ предназначены для объединения всех элементов НКУ в единую информационную сеть и обеспечивают ретрансляцию командной, программной и уставочной информации, а также ТЛФ и ТВ сигналов из ЦУП на станции слежения; ТЛФ, ТВ, ТЛМ информации, получаемой с КА, со станций слежения в ЦУП; информации между ЦУП, моделирующими стендами и центрами обработки научной информации; служебной информации НКУ, необходимой для нормального функционирования контура управления.
Сеть связи НКУ включает управляющий центр, оборудованный специальными ЭВМ, различающими специфические типы информации и автоматически направляющими или переключающими нужную информацию по месту назначения и, кроме того, управляющими резервами сети связи так, чтобы при отказе отдельных каналов потери или задержки информации были минимальными.
Основным, требованием к средствам связи является высокая достоверность передачи информации между элементами НКУ, для чего в процессе передачи командной, программной и уставочной информации из ЦУП на станции слежения происходят ее поразрядное квитирование, проверка контрольной суммы массивов и специальное кодирование.
Высокая надежность передачи информации обеспечивается горячим резервированием каналов связи. Использование спутниковретрансляторов в составе НКУ позволяет:
снизить эксплуатационные расходы НКУ за счет уменьшения количества наземных, корабельных и самолетных станций слежения;
расширить зоны связи (вместо 10 20% на витке до 80 85% для околоземных КА), полосы каналов связи и обеспечить многоканальную связь;
обеспечить высокую достоверность передачи сообщений; существенно упростить процесс управления средствами НКУ.
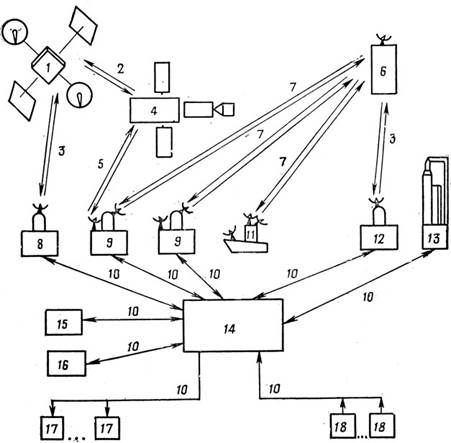
Рис. 11.1. Функциональная схема НКУ: 1 - спутник-ретранслятор для связи с КА; 2 - каналы связи «спутник-ретранслятор _ КА»; 3 - каналы связи «спутник-ретранслятор - станция спутниковой связи»; 4 - обслуживаемый КА; 5 - каналы связи «КА - наземная станция слежения»; 6 - спутник-ретранслятор для связи ЦУП со станциями слежения; 7 - каналы связи «станции слежения - спутник-ретранслятор»; 8 - пункт спутниковой связи для управления КА; 9 - наземные станции слежения; 10 - наземные каналы связи НКУ: 11- корабельная станция слежения; 12 - пункт спутниковой связи для связи с наземными и корабельными станциями слежения; 13 - космодром запуска КА; 14 - центр управления полетом (ЦУП); 15 - комплексный моделирующий стенд; 16 - электрический аналог КА (комплексный стенд); 17 - центры обработки научной информации; 18 -вспомогательные службы управления полетом Центр управления полетом (ЦУП)
БИЛЕТ №4
1. Общее представление о процессе управления полетом. Основные функции управления полетом

Полет - это завершающая стадия создания КА. Различные задачи полета существенно влияют на организацию управления полетом. Как правило, в испытательном полете участвует большое количество специалистов - создателей систем и конструкции КА, в процессе такого полета происходит отладка и проверка наземных средств математического обеспечения и организационной структуры наземных служб. Полет отработанного, серийного КА обеспечивается специализированными службами управления с привлечением специалистов по КА только на самых ответственных участках полета.
С рабочей орбитой КА связана длительность наблюдения его из одного наземного пункта. Низкоорбитальные КА находятся в зоне прямой видимости наземного пункта всего несколько минут (например, станция «Салют-6» 5 - 8 мин), поэтому для обеспечения достаточного времени связи с КА необходима целая сеть наземных пунктов или связь через спутники-ретрансляторы.
Высокоорбитальные КА, а также КА, летящие к другим планетам, находятся в зоне прямой видимости наземного пункта в течение нескольких часов, однако для связи с межпланетными КА нужны более мощные наземные средства (большие диаметры антенн, передатчики большей мощности и т. п.) по сравнению со средствами связи низкоорбитальных КА.
Управление космическим комплексом усложняется с увеличением числа входящих в него КА с точки зрения координирования работы наземных средств с программой работы каждого КА. Наиболее сложным и ответственным является управление полетом пилотируемого космического комплекса в связи с дополнительными задачами взаимодействия Земли и экипажей и обеспечения безопасности полета.
Программа полета - это план работы КА, экипажей (если полет пилотируемый) и наземных средств, взаимодействующих с КА.
Общий план полета разбивают на участки, характерные выполнением определенных промежуточных задач полета. Например, весь полет орбитальной станции «Салют» разбит на участки выведения и орбитального полета, а последний, в свою очередь, - на экспедиции, причем каждая экспедиция, решая свою задачу, имеет вполне определенную последовательность полетных операций:
· выведение транспортного корабля (ТК) с экипажем;
· сближение и стыковка ТК со станцией;
· переход экипажа из ТК в станцию;
· проведение заданной программы исследований и экспериментов в процессе полета экспедиции на станции;
· расстыковка ТК и станции;
· спуск и посадка спускаемого аппарата ТК с экипажем и возвращаемыми грузами.
Программа реализации полетной операции - это временная циклограмма работы систем КА, экипажа и основных средств, участвующих в управлении полетом, с указанием информационного обмена между КА и Землей. Программа реализации полетной операции служит основой для разработки программы управления бортовыми системами и наземными средствами, участвующими в управлении полетом.
Для пилотируемого КА программу реализации разрабатывают с учетом суточного расписания деятельности экипажа.
При разработке программы полета рассчитывают не только основные (штатные) варианты программы реализации, но и варианты изменения полета при отклонениях в режимах работы КА или отдельных отказах приборов и агрегатов.
На основании программы полета уточняют состав средств, привлекаемых к управлению полетом, составляют планы их работы, которые увязывают с программами полета других КА.
Службы и средства, обеспечивающие управление полетом КА, решают такие основные задачи, как:
· реализация программы полета КА для достижения целей полета;
· обеспечение безопасности экипажа и сохранности (живучести) КА;
· выход из нештатных ситуаций и нейтрализация их последствий.
Управление полетом - это непрерывный процесс, в котором можно выделить следующие его составляющие:
· долгосрочное планирование - долгосрочный план текущего участка полета;
· текущее планирование - разработка программы на сутки или несколько ближайших суток;
· реализация текущей полетной операции - собственно управление полетом;
· контроль выполнения полетной операции и состояния КА;
· обработка научной информации, поступающей с КА, и передача ее потребителям;
· корректирование программы с учетом достигнутых результатов.
Реализация полетных операций - это отработка системами КА заданной последовательности управляющих воздействий, в соответствии с которыми КА выполняет маневры, изменяет свою ориентацию в пространстве, включает и выключает служебную и исследовательскую аппаратуру и т. п.
Различают три способа реализации полетных операций:
· программный, когда программа выполнения операции, содержащая последовательность управляющих воздействий, заранее закладывается в бортовые цифровые вычислительные машины (БЦВМ) или формируется ими и отрабатывается без вмешательства с Земли;
· дистанционный, при котором все управляющие воздействия передаются на борт КА с Земли;
· смешанный, когда часть управляющих воздействий передается с Земли, а часть формируется бортовыми системами и экипажем.
Последний способ получил наибольшее применение.
Контроль и анализ выполнения полетных операций и функционирования КА включает контроль прохождения управляющих воздействий, хода типовых режимов работы, энергетических, ресурсных и других характеристик КА, запасов расходуемых веществ и материалов, анализ функционирования систем и диагностику отказов в системах, прогнозирование работоспособности систем КА.
Контроль КА проводится Землей в основном по данным телеметрической информации, поступающей с КА в процессе выполнения полетных операций, а также по информации экипажа.
Основной метод контроля - сравнение фактических значений параметров с их ожидаемыми значениями, получаемыми расчетным путем или моделированием
2. Программно-математическое обеспечение БКУ, алгоритмы управления бортовыми системами
Бортовой комплекс управления - это совокупность систем КА, обеспечивающих управление функционированием КА как единого целого, бортовые системы которого связаны между собой информационными каналами.
Распределение функций управления БКУ включает:
· сбор, обработку и хранение информации о работе систем КА;
· обмен информацией с НКУ;
· логическое управление и координацию работы всех систем КА;
· контроль состояния и функционирования отдельных систем КА, а также их диагностику;
· отображение информации для экипажа;
· реализацию программ управления бортовыми системами, заложенных в память БКУ;
При построении БКУ учитывают помимо функциональных и эксплуатационных требований, предъявляемых к КА, такие специфические требования, как:
· степень его автономности при выполнении полетных операций;
· возможность оперативного вмешательства в процессы управления БКУ со стороны НКУ.
Бортовой комплекс управления обычно имеет четыре режима работы:
- управление от НКУ;
- автономное управление, т. е. управление всеми системами по внутренним программам БКУ;
- смешанный режим, при котором часть управляющих воздействий формирует и передает на борт НКУ, а часть формирует и исполняет БКУ;
- управление с участием экипажа.
Первый режим применяется при проведении особо ответственных полетных операций и при первых включениях режимов в полете, второй - вне зоны видимости станций слежения НКУ и в том случае, когда полетная операция уже отработана, третий - чаще первых двух, так как обладает наибольшей гибкостью.
В процессе полета БКУ взаимодействует с НКУ через каналы связи, по которым передаются необходимая для функционирования контура управления полетом командная, уставочная и программная, телефонная, телеграфная, телевизионная и телеметрическая информации, сигналы радиоконтроля орбиты и сверки времени.
БИЛЕТ №5
1. КА, как объект управления. Типы бортовых систем КА.
КА – это сложная иерархическая система, предназначенная для целенаправленного управляемого передвижения космическом пространстве.
КА как объект управления Информация о КА, важная с точки зрения управления: - Функциональные возможности КА; - Располагаемые ресурсы; - Характеристики полетных операций; - Состав бортовых систем КА и режимы их работы; - Методики управления бортовыми системами КА; - Описание каналов управления; - Методики контроля состояния и работы КА; - Ограничения на режимы работы КА.
Космический аппарат состоит из целого комплекса основных составных частей. Это, прежде всего, целевая аппаратура, ради которой и проектируется КА. Таким образом, целевая аппаратура предназначена для непосредственного обеспечения решения поставленной перед аппаратом задачи. Выбор оптимального состава целевой аппаратуры представляет собой самостоятельную научно-техническую задачу. Другой важнейшей составной частью является корпус КА. В состав КА входят также служебные системы: жизнеобеспечения, ориентации и стабилизации, энергоснабжения, аварийного спасения, посадка, маневра, управления, отделения от носителя, разделения и стыковки, бортового радиокомплекса.
Корпус КА является силовой основой, на который размещается все бортовое оборудование КА. Корпус как несущий элемент КА может быть монококовой (оболочковый) или стержневой (в виде ферм или рам) конструкцией. Оболочковые конструкции применяются тогда, когда необходимо создать для экипажа и бортового оборудования определенный микроклимат и защиту от окружающей среды внутри герметически замкнутого отсека или емкости или когда необходимо получить определенные летно-технические или радиотехнические характеристики аппарата путем выбора определенных геометрических форм корпуса КА (например, аэродинамическое качество). В том случае, когда бортовая аппаратура КА может нормально функционировать в глубоком вакууме, корпус КА не имеет герметизации и может представлять собой стержневую конструкцию.
Корпус должен быть достаточно прочным и жестким, способным выдержать нагрузки, действующие на КА на всех этапах его жизненного цикла.
Корпус должен обеспечивать надежную защиту экипажа и бортового оборудования, расположенного в нем, от воздействия окружающей среды.
Форма корпуса должна обеспечивать при движении КА в атмосфере устойчивость, управляемость, заданное аэродинамическое качество.
Элементы конструкции корпуса выполняются из легких сплавов. Отдельные отсеки изготавливаются из жаропрочных и термостойких материалов. Отсек экипажа, как правило, имеет теплоизоляционное и звукоизоляционное покрытия, люки и иллюминаторы. Корпус пилотируемого КА может быть выполнен многосекционным и состоять из жилого (бытового), рабочего, переходного (шлюзового) и других отсеков. Снаружи корпус пилотируемого КК может иметь специальные радиационную и противометеорную защиты.
Система управления (СУ) обеспечивает выполнение заданной программы работ в автоматическом или автоматизированном режиме, когда на некоторых этапах необходимо вмешательство человека: космонавта на борту или оператора на Земле.
Система ориентации и стабилизации (СОС) осуществляет ориентацию аппарата во время полета и ориентацию относительно объекта исследования, а также стабилизацию (закреплению этого положения). Ориентация может быть постоянной или изменяющейся в процессе движения, может осуществляться не только конкретного аппарата в целом, но и отдельных его частей.
Система терморегулирования (СТР) обеспечивает необходимый тепловой режим на борту ИСЗ, что связано с определенными требованиями для аппаратуры в целом или для каждого прибора в отдельности, хотя существуют определенные общие требования, предъявляемые к разрабатываемой аппаратуре и условиям ее функционирования в составе КА.
Система энергопитания (СЭП) выбирается исходя их времени функционирования и потребляемой мощности.
Бортовой радиокомплекс (БРК) обладает широким диапазоном функций: от измерения расстояний и поиска аппарата до осуществления связи.
Двигательная установка (ДУ) с собственной системой управления для маневрирования на орбите (ИСЗ), выдачи импульса коррекции при движении по траектории к планетам, создание тормозного импульса при посадке на Землю или на поверхность планеты.
Система управления включает автоматику, обеспечивающую в заданной последовательности выполнение рабочих операций, маневр аппарата, заключающийся в определении собственных координат, расчете требуемого импульса и управлении вектором тяги двигательной установки.
Способ определения своего положения (и исполнительный орган) может строиться на использовании внешних воздействий в зависимости от гравитационных, магнитных полей, влияния атмосферы планеты и солнечного давления. В основу может быть заложен принцип гироприборов (гироскопические датчики положения, закрутка аппаратов или специальных роторов). Система может использовать в качестве исполнительных органов малые управляющие реактивные двигатели, работающие на сжатом газе. Информация об ориентации ИСЗ может поступать от датчиков указанного типа или астродатчиков положения Солнца, планет и звезд. Каждый из принципов обеспечивает определенную точность ориентации, определяющую его использование.
Система терморегулирования. Поверхности КА на околоземной орбите имеют среднюю температуру около 300 К и это обеспечивается подбором их оптических характеристик и отношением площадей, на которую падает солнечное излучение и с которой излучается тепловая энергия. Изменение теплового потока, падающего на рассматриваемый элемент КА, приводит к изменению температуры поверхности и, как следствие, к выходу КА из строя. Кроме того, как показывают результаты исследований, обеспечить приемлемый уровень температур для надежной работы научной, радиопередающей и другой аппаратуры без специальных мероприятий невозможно.
Система терморегулирования обеспечивает подвод к аппарату заданных внешних теплопотоков. Для этого аппарат определенным образом ориентируется относительно Солнца, используются покрытия с подобранными значениями коэффициентов поглощения и черноты, экранно-вакуумная теплоизоляция, практически исключающая теплообмен. Иногда этого достаточно для обеспечения рабочего режима аппарата (пассивная система), при необходимости точного регулирования температуры (например, с точностью ±2 °С) применяются активные системы, организующие теплоотвод в соответствии с режимом аппаратуры. Граница использования систем первого и второго типа определяется максимальной мощностью бортового комплекса и допустимыми колебаниями температуры (обычно она лежит в пределах 20…40 Вт).
В активной системе циркулирующий газ приборного отсека отводит тепловой поток на корпус или специальный радиатор. Если необходимо обеспечить большой удельный теплосъем (больше. чем 2 Вт/см² ), в качестве теплоносителя используется жидкость. Обязательным элементом воздушного контура является вентилятор, обеспечивающий циркуляцию газа и вынужденную конвекцию (свободная конвекция отсутствует в невесомости). В качестве управляющих элеметов применяются дроссели расхода, работающие по командам от датчиков температуры.
Система обеспечения обычно строится на использовании некоторого постоянного источника энергии, рассчитанного на средний уровень мощности бортового комплекса, и буферных химических батарей, обеспечивающих пиковые нагрузки. В качестве постоянных источников применяются химические и солнечные батареи, топливные элементы, изотопные и ядерные энергоустановки. В зависимости от потребляемой мощности и продолжительности работы определяются зоны целесообразного использования каждого из источников. Кроме того, система включает в себя преобразователи, коммутационное устройство, автоматику управления и кабельную сеть.
Радиокомплекс включает в себя приборные блоки и антенно-фидерное устройство. В зависимости от назначения, длины волны и необходимого коэффициента усиления используются штыревые, щелевые и рупорные антенны, полуволновые диполи и параболические рефлекторы. Антенны больших размеров часто изготавливают складывающимися на участке выведения. Частоты от 100 МГц до 1ГГц предполагается использовать для связи с ИСЗ на небольшой высоте, когда применяются ненаправленные и широконаправленные антенны; частоты 1… 10 ГГц — при узконаправленных антеннах и широкополосных линиях связи (системы слежения, телепередачи). Эти частоты соответствуют радиоокну атмосферы и минимуму «шумов неба».
Двигательная установка КА имеет существенные особенности. Так, для подачи топлива к двигателю часто применяются вытеснительные системы. Баки должны быть снабжены системами и средствами, обеспечивающими запуск двигателя в условиях невесомости. Если применяются системы подачи топлива с помощью турбонасосного агрегата (TНА), то образующийся парогаз используется как рабочее тело в управляющих соплах, либо дожигается в двигателе. Топлива, используемые для двигательных установок КА, — долгохранимые и самовоспламеняющиеся.
С целью уменьшения массы, повышения надежности и управляемости современные космические ЖРД работают при сравнительно низком давлении в камере, при возможности глубокого дросселирования (1:5) тяги. С той же целью — уменьшения массы конструкции — сопла камер охлаждаются лишь частично с помощью циркулирующего компонента в зоне, прилегающей к критическому сечению.
РДТГ, используемые для КА, характеризуются низкой величиной импульса. Для обеспечения стабильности применяется термостатирование.
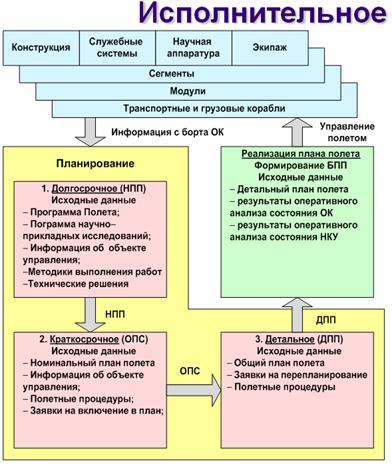
2. Уровни планирования при работе с долговременными КА.
Иерархия уровней планирования полета
Предметом коллективной деятельности, связанной с планированием космического полета являются:
1. Решение задач, относящихся к баллистическому обеспечению;
2. Определение правил и ограничений исполнительного планирования;
3. Сбор и формализация данных по планированию;
4. Планирование использования ресурсов и работы систем ОК;
5. Определение «окон» выполнения научных экспериментов;
6. Организация рационального режима труда и отдыха космонавтов (РТО);
7. Назначение приоритетов полетным операциям;
8. Разработка плана полетных операций, позволяющих выполнить цели и задачи программы космического полета.
БИЛЕТ №6
1. Командно - программное управление КА
Полет - это завершающая стадия создания КА. Различные задачи полета существенно влияют на организацию управления полетом. Как правило, в испытательном полете участвует большое количество специалистов - создателей систем и конструкции КА, в процессе такого полета происходит отладка и проверка наземных средств математического обеспечения и организационной структуры наземных служб. Полет отработанного, серийного КА обеспечивается специализированными службами управления с привлечением специалистов по КА только на самых ответственных участках полета.
Программа реализации полетной операции - это временная циклограмма работы систем КА, экипажа и основных средств, участвующих в управлении полетом, с указанием информационного обмена между КА и Землей. Программа реализации полетной операции служит основой для разработки программы управления бортовыми системами и наземными средствами, участвующими в управлении полетом.
Для пилотируемого КА программу реализации разрабатывают с учетом суточного расписания деятельности экипажа.
При разработке программы полета рассчитывают не только основные (штатные) варианты программы реализации, но и варианты изменения полета при отклонениях в режимах работы КА или отдельных отказах приборов и агрегатов.
На основании программы полета уточняют состав средств, привлекаемых к управлению полетом, составляют планы их работы, которые увязывают с программами полета других КА.
Службы и средства, обеспечивающие управление полетом КА, решают такие основные задачи, как:
· реализация программы полета КА для достижения целей полета;
· обеспечение безопасности экипажа и сохранности (живучести) КА;
· выход из нештатных ситуаций и нейтрализация их последствий.
Управление полетом - это непрерывный процесс, в котором можно выделить следующие его составляющие:
· долгосрочное планирование - долгосрочный план текущего участка полета;
· текущее планирование - разработка программы на сутки или несколько ближайших суток;
· реализация текущей полетной операции - собственно управление полетом;
· контроль выполнения полетной операции и состояния КА;
· обработка научной информации, поступающей с КА, и передача ее потребителям;
· корректирование программы с учетом достигнутых результатов.
Реализация полетных операций - это отработка системами КА заданной последовательности управляющих воздействий, в соответствии с которыми КА выполняет маневры, изменяет свою ориентацию в пространстве, включает и выключает служебную и исследовательскую аппаратуру и т. п.
· Различают три способа реализации полетных операций:
· программный, когда программа выполнения операции, содержащая последовательность управляющих воздействий, заранее закладывается в бортовые цифровые вычислительные машины (БЦВМ) или формируется ими и отрабатывается без вмешательства с Земли;
· дистанционный, при котором все управляющие воздействия передаются на борт КА с Земли;
· смешанный, когда часть управляющих воздействий передается с Земли, а часть формируется бортовыми системами и экипажем.
Последний способ получил наибольшее применение.
Контроль и анализ выполнения полетных операций и функционирования КА включает контроль прохождения управляющих воздействий, хода типовых режимов работы, энергетических, ресурсных и других характеристик КА, запасов расходуемых веществ и материалов, анализ функционирования систем и диагностику отказов в системах, прогнозирование работоспособности систем КА.
Контроль КА проводится Землей в основном по данным телеметрической информации, поступающей с КА в процессе выполнения полетных операций, а также по информации экипажа.
Основной метод контроля - сравнение фактических значений параметров с их ожидаемыми значениями, получаемыми расчетным путем или моделированием.
Анализ функционирования систем направлен на определение причин, вызвавших ненормальное выполнение заданных режимов и локализацию отказавшего элемента или блока. На основе статистической обработки уточняются динамические характеристики КА (моменты инерции, масса, углы перекоса эллипсоида инерции и др.) и ресурсные характеристики всех систем КА, используемые для прогноза их работоспособности и выдачи рекомендаций по переключению или замене блоков. Результаты анализа и прогноза работоспособности используют при разработке программы полета для следующих суток полета.
Предварительная обработка и анализ результатов научных исследований требуются для оперативной корректировки программы полета с учетом фактического функционирования исследовательской аппаратуры, достаточности и достоверности результатов исследований и экспериментов.
Работа научной аппаратуры оценивается методом сравнения текущих параметров (в том числе и измерительной информации) с расчетными или предварительно полученными на модели.
В настоящее время процесс управления полетом имеет высокую степень автоматизации, причем сохраняется тенденция к ее дальнейшему увеличению.
Автоматизация планирования позволяет оптимизировать программу полета КА на каждом этапе ее разработки, повысить оперативность планирования и сократить численность персонала управления, занятого планированием.
Автоматизация процесса реализации полетных операций повышает надежность их выполнения за счет алгоритмического и аппаратурного резервирования с автоматическим переходом на резерв.
Автоматизация контроля и анализа работы систем КА увеличивает надежность КА за счет расширения числа оперативно контролируемых параметров, сокращает время анализа и время выхода из нештатных ситуаций.
Автоматизация обработки и анализа научной информации ускоряет выработку оптимальных рекомендаций по изменению программы исследований и программы полета, что улучшает показатели эффективности КА.
В дальнейшем предполагается, что все функции управления будут переданы комплексу ЭВМ, а за персоналом управления будут оставлены определение целей и задач и принятие решений в случае нештатных ситуаций, а также контроль за работой ЭВМ.
Задачи управления полетом решает комплекс бортовых и наземных средств и служб, образующих контур управления полетом - динамичную структуру, изменяющуюся в ходе полета, в состав которой как основные звенья входят бортовой(БКУ) и наземный (НКУ) комплексы управления, объединенные информационными связями в единый контур. Исторически между БКУ и НКУ сложилось такое, распределение функций управления, при котором большую их часть выполнял наземный комплекс. Развитие бортовых вычислительных машин и передача большей части функций управления БКУ позволяют расширить возможности КА за счет автоматизации управления полетными операциями, снизить затраты на управление за счет сокращения наземных средств управления и наземного персонала управления, повысить надежность КА за счет введения бортовой диагностики и алгоритмического и функционального дублирования в системах КА.
Распределение функций управления между БКУ и НКУ зависит от типа и назначения КА, длительности и сложности его полета, от многих других причин и включает:
а) для БКУ:
· сбор, обработку и хранение информации о работе систем КА;
· обмен информацией с НКУ;
· логическое управление и координацию работы всех систем КА;
· контроль состояния и функционирования отдельных систем КА, а также их диагностику;
· отображение информации для экипажа;
реализацию программ управления бортовыми системами, заложенных в память БКУ;
б) для НКУ:
· планирование и реализацию программы полета;
· сбор, обработку и хранение информации о работе комплексов КА, отдельных КА и их бортовых систем;
· обмен информацией с БКУ КА и выдачу управляющих воздействий на КА;
· контроль, анализ и диагностику систем КА;
· отображение, документирование и представление информации потребителям;
· координацию работы отдельных КА и комплексов КА;
· управление средствами связи;
· обеспечение заключительных наземных испытаний КА;
· обеспечение информации от системы единого времени (СЕВ).
Как видно, большинство функций НКУ и БКУ дублируют друг друга, что не случайно, так как большие затраты на космические полеты, участие в полетах экипажей требуют очень высокой надежности управления, обеспечение которой возможно только дублированием функций управления.
Контур управления полетом строится как автоматизированная (а не полностью автоматическая) система управления, так как управление в условиях неопределенности, в частности принятие решений, более эффективно, чем ЭВМ, выполняет персонал управления. Контур управления обеспечивает выполнение заданной программы полета в пределах ряда решений, зависящих от реального функционирования объекта управления.
2. Бортовой контур управления долговременных орбитальных станций. Режимы работы БКУ.
Бортовой комплекс управления - это совокупность систем КА, обеспечивающих управление функционированием КА как единого целого, бортовые системы которого связаны между собой информационными каналами.
Распределение функций управления БКУ включает:
· сбор, обработку и хранение информации о работе систем КА;
· обмен информацией с НКУ;
· логическое управление и координацию работы всех систем КА;
· контроль состояния и функционирования отдельных систем КА, а также их диагностику;
· отображение информации для экипажа;
· реализацию программ управления бортовыми системами, заложенных в память БКУ;
При построении БКУ учитывают помимо функциональных и эксплуатационных требований, предъявляемых к КА, такие специфические требования, как:
· степень его автономности при выполнении полетных операций;
· возможность оперативного вмешательства в процессы управления БКУ со стороны НКУ.
Бортовой комплекс управления обычно имеет четыре режима работы:
- управление от НКУ;
- автономное управление, т. е. управление всеми системами по внутренним программам БКУ;
- смешанный режим, при котором часть управляющих воздействий формирует и передает на борт НКУ, а часть формирует и исполняет БКУ;
- управление с участием экипажа.
Первый режим применяется при проведении особо ответственных полетных операций и при первых включениях режимов в полете, второй - вне зоны видимости станций слежения НКУ и в том случае, когда полетная операция уже отработана, третий - чаще первых двух, так как обладает наибольшей гибкостью.
В процессе полета БКУ взаимодействует с НКУ через каналы связи, по которым передаются необходимая для функционирования контура управления полетом командная, уставочная и программная, телефонная, телеграфная, телевизионная и телеметрическая информации, сигналы радиоконтроля орбиты и сверки времени.
БИЛЕТ №7
1.Оценка работы бортовых систем КА при управлении полётом.
Оценка состояния космического аппарата (КА) в полете играет роль обратной связи, с помощью которой оценивается соответствие состояния КА, как объекта управления плановому на определенный момент времени. Поскольку управление полетом представляет собой непрерывный динамический процесс, то оценка состояния также носит непрерывный характер.
Оценка состояния КА проводится на основе анализа данных как совокупности параметров, получаемых с борта КА: по телеметрическому тракту, по докладам экипажа, по командным квитанциям (на рис. 1 . представлена схема обмена данными при управлении полетом Международной космической станции).
Оперативная оценка параметров состояния космического аппаратаРис.1. Схема обмена данными при управлении полетом Международной космической станции
Основным источником информации о состоянии КА были и остаются данные, получаемые в составе телеметрической информации. Объем телеметрической информации, поступающей с борта КА, для современных пилотируемых кораблей составляет десятки тысяч телеметрических параметров. Каждый такой параметр характеризует состояние узла, блока, агрегата, подсистемы какой-либо бортовой системы, или какой-либо аспект функционирования этого узла, блока, агрегата.
Как правило, группа управления организуется таким образом, чтобы контроль и анализ состояния каждой отдельной системы выполнялся отдельной подгруппой группы управления, например, работу системы управления движением и навигации (СУДН) анализируют специалисты группы СУДН. Однако, количество телеметрических параметров, которые должны анализировать специалисты подгрупп, даже с учетом анализа только "своей" системы остается достаточно велико.
Для решения этой проблемы используются несколько взаимосвязанных направлений. Во-первых, порядок работы специалистов по оценки тех или иных параметров организуется определенным образом.
При подготовке к сеансу связи с КА или при подготовке к проведению активных работ со "своей" бортовой системой, специалист должен проанализировать предстающую программу управления полетом КА и выделить наиболее важные операции со "своей" системой с привязкой ко времени. Для полученных моментов времени специалист должен оценить наличие телеметрической информации и вариантов ее сбора и обработки (программ опроса). Для каждого момента времени специалист должен выделить подмножество параметров, которые он будет контролировать, из общего множества параметров, описывающих данную систему. Для выбранных множеств параметров специалист должен спрогнозировать их состояние на выбранные моменты времени.
Во время сеанса связи или проведения активных работ с системой специалист проводит сравнительную оценку заранее спрогнозированных значений контролируемых параметров для текущего момента времени и параметров, полученных с борта в потоке телеметрической информации. Так же проводится контроль соответствия значений параметров плановому состоянию системы. В случае выявления отклонений в показаниях параметров, относительно прогнозируемых, специалист должен проанализировать качество получаемой телеметрической информации. При условии получения достоверной телеметрической информации специалист анализирует дополнительный массив данных и, если, факт отклонения подтвердился, специалист вырабатывает рекомендации по работе с системой: прекратить работу, перейти на резервный комплект, реконфигурировать систему и т.д.
Для принятия окончательного решения специалисту может потребоваться более тщательный анализ, который проводится вне сеанса связи, то есть вне темпа реального времени. Такой анализ позволяет использовать значительно больший объем информации и рассматривать бортовые процессы, отраженные в телеметрической информации, с привязкой к временной оси. В подобном анализе могут принимать участие также разработки системы, различные группы инженерной поддержки и т.д.
При завершении процесса анализа специалист должен сформулировать существо изменения в состоянии бортовой системы; признаки изменения, т.е. параметры, отклонившиеся от нормы; предполагаемые причины; ожидаемые последствия; варианты возможных действий по управлению системой; необходимый для этого перечень работ.
Одним из важнейших этапов работы специалиста является задача соотнесения оцениваемого в данный момент времени параметра и состояние контролируемого аспекта функционирования КА, который этот параметр и характеризует.
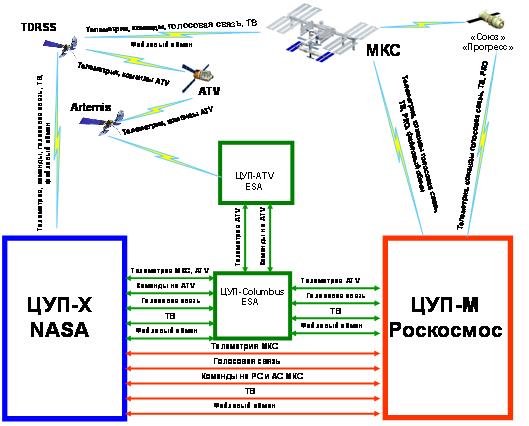
Рис.1. Схема обмена данными при управлении полетом Международной космической станции
2.Управление полетом при возникновении нештатных ситуаций.
Процедура управления полетом при возникновении нештатных ситуаций.
Принятие решений и реализация мероприятий по выходу из нештатной ситуации осуществляется в темпе сеанса связи если нештатная ситуация при ее дальнейшем развитии до следующего сеанса связи:
-угрожает безопасности экипажа;
-приводит к нарушению работоспособности РС МКС;
-приводит к недопустимому перерасходу рабочего тела или электроэнергии;
-приводит к срыву целевой задачи полета транспортного корабля;
-приводит к срыву основной задачи программы текущих суток при условии, если нештатная ситуация рассмотрена в ЭТД и однозначно идентифицирована.
В остальных случаях решения принимаются после детального анализа нештатной ситуации и выработки рекомендаций с участием специалистов разработчиков, и задействованием моделирующих средств (при необходимости).
Ситуации, которые приводят к существенному изменению плана работ с объектом управления называют нештатными.
Нештатные ситуации разделяют на расчётные и нерасчётные.
К классу расчётных (рассмотренных) нештатных ситуаций относятся ситуации, анализ влияния которых на ход полета проведён и предусмотрена специальная программа действий по ликвидации или компенсации их последствий.
В основу расчетных нештатных ситуаций положены расчетные отказы, рассмотренные при анализе работы систем КА до полета или возникавшие при наземных испытаниях систем и ранее проведенных полетах.
Нештатные ситуации, причиной которых является не рассмотренный заранее отказ, называют нерасчетными.
Нештатные ситуации, сложившиеся в результате появления неустранимых отказов и приводящие к нарушению требований безопасности экипажа или прекращению эксплуатации КА, называются аварийными.
При описании расчётной нештатной ситуации используют форматы, включающие в себя следующие характеристики нештатной ситуации:
• форма проявления;
• возможные причины возникновения;
• динамика развития;
• время достижения критической фазы развития;
• программа действий по ликвидации нештатной ситуации;
• ресурсы, необходимые для выхода из нештатной ситуации;
• рекомендации по корректировке программы полета после принятия мер по ликвидации нештатной ситуации на разных стадиях ее развития и в случае, если она не была ликвидирована.
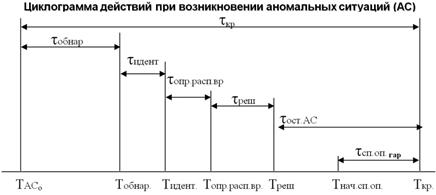
Тобнар. – момент времени обнаружения АС, Тидент. – момент завершения идентификации АС,
Треш. – момент принятия решения и начала действий по останову развития АС, Топр.расп.вр. – момент завершения определения располагаемого времени, Тнач.сп.оп. – предельно поздний момент начала спасательной операции, Ткр.–расчетный или прогнозируемый момент наступления критической фазы АС,
tкр – продолжительность достижения критической фазы развития данной АС, tобнар. – время, затрачиваемое на обнаружение данной АС, tидент – длительность процедуры идентификации данной АС,
tреш. – длительность подготовки и принятия решения о ликвидации АС, tопр.расп.вр. – длительность определения располагаемого времени на останов АС tост.АС – время на останов развития и нормализацию данной АС, tсп.оп.гар– гарантированная длительность операции по спасению экипажа.
ОБЩАЯ СХЕМА РАБОТЫ ПРИ ВОЗНИКНОВЕНИИ НЕШТАТНОЙ СИТУАЦИИ
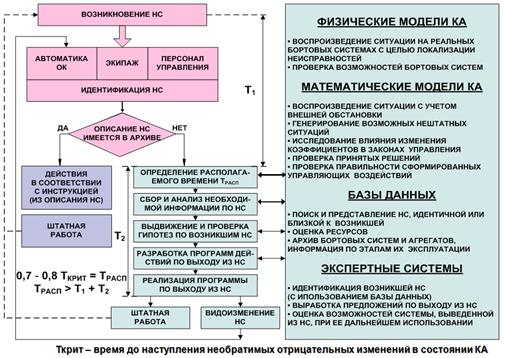
При возникновении нерасчетной нештатной ситуации во время полета КА, после того как путем сравнения ее с ситуациями, описанными в документации, установлено, что она является нерасчетной, экипаж КА и специалисты по управлению полетом обычно соблюдают определенный алгоритм действий, выработанный практикой проведения многих космических полетов. В сжатом виде этот алгоритм выглядит следующим образом.
1. По имеющейся информации оперативно оценивается влияние сложившейся ситуации на безопасность экипажа и на работоспособность и определяется резервное время до наступления критических событий.
2. Уточняются проявления возникшей ситуации, т. е. проводится дополнительный оперативный анализ телеметрической информации, а также сигнализации и параметров, индицируемых на бортовых пультах космонавтов с тем, чтобы наиболее полно представить картину воздействия возникшей ситуации на состояние КА.
3. Выдвигаются гипотезы о причинах, вызвавших нештатную ситуацию.
4. Проводится проверка гипотез. Проверка проводится как путем анализа логики работы бортовых систем, так и с помощью моделирования этих гипотез на специальных стендах или на натурных образцах систем и отдельных их блоков с целью воспроизвести сложившуюся ситуацию на моделирующих средствах.
5. Разрабатываются меры по устранению выявленной причины нештатной ситуации и по компенсации нежелательных последствий происшедшего отклонения состояния КА от нормы. Составляется план их реализации.
6. Выработанные меры реализуются выдачей управляющих воздействий на бортовые системы КА.
7. Оформляется описание данной ситуации, которая с этого момента попадает в разряд расчетных.
БИЛЕТ №8
1.Назначение, функциональная схема и принцип работы СУДН, задачи, решаемые при эксплуатации СУДН.
2)Экипаж орбитальной станции, как звено управления.
Экипаж станции
Экипаж станции необходим для выполнения наблюдений, проведения научных исследований, управления работой аппаратуры для прикладных и экономических задач, технических экспериментов, монтажно-демонтажных работ, освоения длительных полетов в условиях невесомости и т. д., т. е. для выполнения задач, которые невозможно решить с помощью автоматики или которые требуют создания слишком сложной и дорогостоящей аппаратуры. Наличие экипажа требует создания средств его доставки на станцию и возвращения на Землю, жилых отсеков достаточных объемов; установку системы жизнеобеспечения (СЖО) и безопасности, пополнения расходуемых материалов (пища, вода, кислород и др.); установку бытового оборудования и средств комфорта и т. п.
Однако несмотря на эти сложности и учитывая, что процесс освоения человеком условий жизни и работы на орбите еще далеко не закончен, перед экипажем ставят более широкие задачи, в том числе и те, которые можно решить автоматическими средствами. перед экипажем ставят более широкие задачи, в том числе и те, которые можно решить автоматическими средствами.
Количество членов экипажа (одновременно находящихся на станции) зависит от многих факторов. В настоящее время считают, что по соображениям безопасности в длительном полете (подстраховка друг друга, психологическая поддержка) количество членов экипажа должно быть не менее двух человек, а оптимальным количеством членов экипажа (длительное время находящихся на борту станции) два-три человека. Это количество может увеличиваться за счет экспедиций посещения до предельных возможностей кораблей и станции (для станции типа «Салют»до четырех шести человек). При этом учитывают потребности в управлении научной и служебной аппаратурой, возможности пилотируемого корабля, оптимизацию по балансу расходуемых элементов СЖО, которые необходимо пополнять с помощью грузовых кораблей, и др. Для современных станций количество членов экипажа посещения также не будет превышать двух-трех человек, что позволит при создании таких станций затратить минимальные массы на жилые отсеки и систему жизнеобеспечения.
Для больших станций (например, база для строительства солнечной электростанции на орбите) количество членов экипажа будет определяться потребностями выполнения задачи в заданный срок и может составлять несколько десятков человек.
Специализация экипажа зависит от количества его членов. При двух членах основного экипажа специализация их практически отсутствует, оба члена экипажа взаимозаменяемы по основным операциям полета (по соображениям безопасности и надежности). Члены экспедиции посещения
могут специализироваться только на решении задач, характерных для данной экспедиции (например, международный экипаж со своей аппаратурой и экспериментами).
Введение в состав экипажа третьего (и более) члена позволит снизить, или исключить совсем требования по знанию им (ими) служебных систем станции и кораблей, которые обеспечивают безопасность работы и возвращение экипажа в любых ситуациях (эта задача возложена на первых
двух членов экипажа), и в короткий срок подготовить к полету любого специалиста высокой квалификации (астрофизика, геофизика, наладчика аппаратуры и инструментов, врача и т. п.) для выполнения им узкой, специальной задачи.
При создании больших станций, на которых количество членов экипажа может достигать нескольких десятков человек, необходима большая дифференциация и специализация между ними, причем состав специалистов может зависеть от работ, выполняемых на станции (например, на этапе сборки станции из элементов конструкции будут преобладать монтажники, на этапе настройки научной аппаратуры специалисты-наладчики и т. д.).
Режим работы членов экипажа станции может быть либо непрерывным (с передаваемыми «вахтами сменами»), либо синхронным, как на станции «Салют6», где сон и бодрствование всех членов экипажа происходит в одно и то же время. Такой режим имеет много положительных моментов, удобен с точки зрения взаимодействия с Землей.
Однако для выполнения некоторых служебных (прибытие и стыковка к станции другого корабля) или научных (наблюдение заданного природного явления) операций возможно нарушение режима работы экипажа из-за несовпадения проводимых операций с принятым режимом. Поэтому при выполнении операций, требующих постоянного участия экипажа, более целесообразным может быть непрерывный режим работы.
Длительность полета одного экипажа (одной смены) необходимо рассматривать исходя из выбора оптимальной длительности смены экипажа (частоты смены экипажей) и дальнейшего изучения возможностей увеличения длительности полета человека в космосе. Оптимальную длительность полета одного экипажа обычно выбирают с учетом:
достигнутой длительности безопасного непрерывного нахождения на станции (с использованием имеющихся средств профилактики невесомости и психологической поддержки);
поддержания достаточно высокой работоспособности и качества работы;
возможностей (ограничений) и стоимости замены экипажей (различной для низкои высокоорбитальной станций).
Изучение возможностей дальнейшего увеличения длительности полета человека в космосе это задел на будущее (экспедиции к другим планетам, работа на орбитальных промышленных станциях, сборка сооружений, организация поселений около Земли и т. п.). С точки зрения разработки пилотируемой космической техники важно знать предельные возможности человека и средств профилактики невесомости и определить границу целесообразности перехода к созданию искусственной тяжести. Эти задачи предстоит решать на пилотируемых орбитальных станциях.
Этапы полета
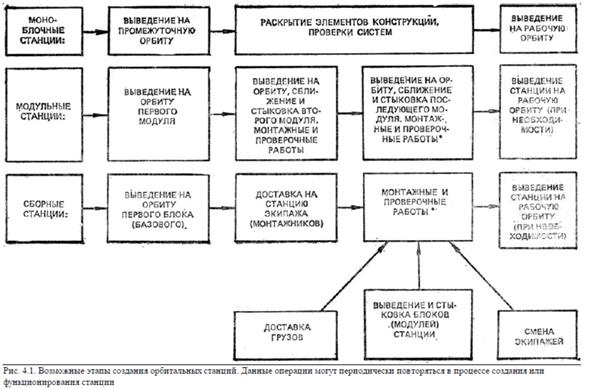
Основными и наиболее характерными участками полета станции считают этапы создания станции на орбите, доставки и возвращения экипажей (смена экипажей), материально-технического снабжения, исследований или решения хозяйственных задач (рис. 4.1).
Этап создания на орбите моноблочной станции может составлять всего несколько дней, модульной станции в зависимости от количества стыкуемых модулей и объема монтажных работ от нескольких недель до нескольких месяцев, а сборной станции несколько лет. На этап создания могут накладываться этапы смены экипажей и материально-технического снабжения. В процессе раскрытия (разворачивания) элементов конструкции возможен выход экипажа в открытый космос с применением средств передвижения вне гермо-отсеков и монтажных манипуляторов, а при создании протяженных пространственных конструкций применение специальных сборочных агрегатов и технологической оснастки. Станция может собираться как на рабочей, так и на промежуточной орбите, с выходом на рабочую орбиту с помощью своей двигательной установки или грузового корабля, или буксира, или разгонного модуля и т. п.
Этап доставки и возвращения экипажа (смена экипажа) может продолжаться от нескольких часов до нескольких суток. В существующих схемах полета (это, очевидно, сохранится и в будущем) пилотируемые корабли при сближении являются активными, т. е. сближение и стыковка идут за счет маневрирования (изменения орбиты) самого корабля.
Этап материально-технического снабжения может быть от нескольких суток до нескольких недель и зависит от объема погрузочно-разгрузочных и монтажно-демонтажных работ, которые необходимо выполнить по прибытии корабля с грузом.
Этап исследований или решения хозяйственных задач является основной выходной характеристикой станции, суммарная длительность которого закладывается при разработке станции, исходя из поставленных перед ней задач. На этот этап могут накладываться (или прерываться) этапы смены экипажа и материально-технического снабжения.
БИЛЕТ №9
1.)Назначение, функциональная схема и принцип работы двигательных установок, задачи, решаемые при эксплуатации двигательных установок.
Двигательные установки реализуют управление движением центра масс КА, изменяя скорость его движения.
Двигательная установка космического аппарата состоит из электроракетной двигательной установки (ЭРДУ) и газовой двигательной установки (ГДУ). ЭРДУ используется для коррекции орбиты, приведения КА в рабочую точку орбиты и создания моментов для разгрузки.
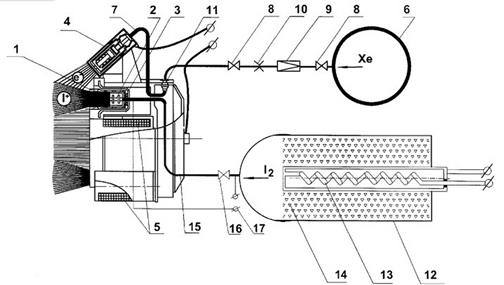
На чертеже представлена электроракетная двигательная установка, в качестве рабочего тела которой используют иод.
Она включает ЭРД (СПД) и СХП. Двигатель содержит разрядную камеру 1, выполненную из изолятора и имеющую форму открытого с одной стороны тора, внутри которой установлен кольцевой анод 2, снабженный нагревателем 3, катод 4 и магнитную систему 5. Рабочее тело катода (ксенон высокой чистоты) заправлено в баллон высокого давления 6, соединенный трубопроводом 7 с катодом 4, причем трубопровод 7 содержит арматуру: клапаны 8, редукторы 9 (на чертеже показан один), жиклеры 10, а также трубопровод снабжен электроизолятором 11. Емкость с иодом 12, снабженная нагревателем 13 и содержащая иод в твердом состоянии 14, соединена трубопроводом 15, содержащим клапан 16 и нагреватель 17, с анодом 2 разрядной камеры 1.
Предлагаемая ЭРДУ работает следующим образом.
ЭРДУ монтируют в вакуумной камере, которую окачивают до давления порядка 10-5 мм рт.ст. Предварительно нагревают катод 4, анод 2 нагревателем 3, емкость с иодом 12 нагревателем 13 и трубопровод 15 нагревателем 17.
Иод 14, находящийся в твердом состоянии в емкости 12, нагревают до температуры 70-110°С, чтобы возгонкой из твердого состояния создать соответствующее давление в емкости порядка 10-100 мм рт.ст., достаточное для обеспечения заданного значения расхода рабочего тела и устанавливаемое в зависимости от величины гидравлического сопротивления трубопровода и арматуры. При этом одновременно с разогревом катода 4 нагревают трубопровод 15 анода 2 разрядной камеры 1 и анод 2 до температуры, величину которой устанавливают не ниже температуры иода, но ниже температуры плавления иода (113,7°С), что позволяет исключить конденсацию иода во всем диапазоне рабочих давлений двигателя. Открывают клапаны 8 и 16 и подают заданным расходом ксенон в катод 4 и иод в анод 2 двигателя. Включают разрядное напряжение (между катодом и анодом) и подают напряжение поджига. После запуска двигателя и выхода его на номинальный режим выключают подогрев катода и анода. При этом учитывая близкие значения атомных весов ксенона и иода (131,3 и 126,9 соответственно) и потенциалов ионизации (12,1 и 10,44), уровень соотношения расходов в катод и в анод примерно равны их величинам для случая, когда в катод и анод подают ксенон, т.е. расход иода в анод устанавливают в диапазоне 85-95% от суммарного расхода рабочего тела.
Электроракетная двигательная установка включает в себя аппаратуру преобразования и управления двигательной установки (АПУ ДУ), восемь тяговых модулей (ТМ) и блок подачи ксенона (БПК1). АПУ ДУ (блоки АПУ1 и АПУ2) как часть ЭРДУ управляется по алгоритмам ПО управления и контроля (УК) двигательной установки. Программное обеспечение УК двигательной установки состоит из двух программных модулей: • программное обеспечение отработки кодовых команд ЭРДУ (ПО КК ЭРДУ) – входит в состав функционального программного обеспечения (ФПО) БЦВС и формирует признак исполнения конкретной кодовой команды; • программное обеспечение управления и контроля ЭРДУ (ПО УК ЭРДУ) – входит в состав ФПО вычислительной системы БУК. Система управления согласно полетному заданию или требованиям разгрузки (но только после закладки на борт кодовой команды на разрешение работы с АПУ ДУ) формирует и выдает в ПО УК ДУ при- знаки управления ТМi (i=1÷8) (единичное значение признака – «Включить ТМi », нулевое – «Отключить ТМi »), сопровождаемые признаком «Сеанс работы с ЭРДУ» (единичное значение формируется ПО СУ не позже поступления команды на «первое» в сеансе включение ТМ, а нулевое – не ранее поступления команды на «последнее» в сеансе отключение ТМ). Алгоритмы ПО ДУ осуществляют управление и контроль ЭРДУ согласно собственной логике. При этом команды, сформированные ПО УК ЭРДУ, передаются в АПУ ДУ с помощью командных импульсов длительностью 0,6 секунды. Для каждого ненулевого значения командного слова формируются и выдаются в исполнительную плату (ИП) два байта информации и через шесть ТСУ (ТСУ = 100 мс – цикл системы управления). Кроме того, ПО СУ принимает (осуществляет опрос) из АПУ ДУ для программного обеспечения управления и контроля шести функциональных сигналов. При управлении ЭРДУ по кодовым командам из НКУ, передаваемым через телекомандную систему (ТКС), тракт поступления команд в агрегаты ЭРДУ представляет собой следующую цепочку: а) программное обеспечение системы управления осуществляет прием кодовых команд для ПО КК ЭРДУ в оперативное запоминающее устройство БЦВС; б) ПО КК ЭРДУ в момент времени исполнения КК (задается в со- ставе КПИ КК) формирует номер кодовой команды (внутренний) для ПО УК ЭРДУ; в) программное обеспечение системы управления реализует передачу номера кодовой команды из БЦВС (от ПО КК ЭРДУ) в вычислительную систему «БУК–МД» (к ПО УК ЭРДУ) по мультиплексному каналу обмена; г) программное обеспечение управления и контроля ЭРДУ формирует и передает через ПО СУ команды управления в АПУ ДУ. Коррекция значений настраиваемых параметров ЭРДУ осуществляется при помощи кодовых команд от НКУ.
Газовая двигательная установка включает в себя четыре газовых двигателя (ГД) малой тяги и блок подачи ксенона (БПК). ГДУ предназначена для создания моментов относительно осей космического аппарата для разгрузки комплекса управляющих двигателей-маховиков в случае невозможности использования тяговых модулей электроракетной двигательной установки космического аппарата. Это случается: – при отработке циклограммы управления на начальном участке полета (до готовности к работе ТМ); – по информации из суточного полетного задания. Формирование команд управления по подготовке ГДУ к работе реализуется СУСС в виде жесткой последовательности команд с учетом значений настраиваемых параметров (в том числе поправок к длительностям соответствующих операций): – при первом включении СУ (от РБ или от ТКС) выполняется последовательность команд: 1) обогрев камер ГД; 2) управление пироклапанами; 3) заполнение 1-й магистрали БПК рабочим телом; 4) подготовка магистрали БПК к работе; – при последующих включениях ГДУ выполняется последовательность команд: 1) обогрев камер ГД; 2) подготовка магистрали БПК к работе. В процессе подготовки ГДУ осуществляется подача напряжения удержания на цепи питания электроклапанов (ЭК) ГДУ. Команды на включение/отключение газовых двигателей формируются СУСС по признакам, полученным от системы стабилизации и ориентации (ССО). При этом реализуется следующая микро-циклограмма управления ЭК двигателей: – подключение ЭК к цепям питания (начало открытия ЭК) для включаемых ГД и отключение ЭК от цепей питания (закрытие ЭК) для отключаемых ГД; – через одно ТСУ подача напряжения открытия на цепи питания ЭК ГДУ; – через два ТСУ снятие напряжения открытия (завершение открытия ЭК включаемых ГД и перевод их на напряжение удержания). Функциональный контроль работы ГДУ осуществляется алгоритмами ССО по оценке эффективности разгрузки комплекса управляющих двигателей-маховиков (КУДМ). При неэффективности разгрузки КУДМ осуществляется попытка автоматической смены рабочей ветви БПК. Непосредственное управление работой агрегатами ГДУ (электроклапанами и нагревателями ГД и БПК) посредством передачи на борт кодовых команд не предусматривается. Кодовые команды тракта управления ГДУ предназначены для: – оперативного воздействия на работу ГДУ с НКУ (смена магистрали БПК3 без остановки работы ГДУ, запрещение и разрешение работы с ГДУ для выполнения задач СУ); – сброса давления в магистралях БПК при паузах в работе ДУ; – обеспечения возможности в нештатных ситуациях использовать для подачи рабочего тела к ТМ блок БПК (режим «совместная работа ЭРДУ с БПК»). Коррекция значений настраиваемых параметров ГДУ осуществляется при помощи кодовых команд от НКУ.
ЭРДУ имеют множество областей применения, включая коррекцию орбит, управление угловым движением КА, прецезионное управление относительным движением групп КА и маршевые задачи.
ЭРДУ позволяют повысить эффективность средств выведения, увеличить срок активного существования КА, увеличить массу целевой аппаратуры КА, повысить живучесть КА, сократить длительность межпланетных перелетов и решить ряд задач, нереализуемых при использовании других существующих средств.
ЭРДУ на основе СПД-100 и СПД-140Д планируется использовать для довыведения на ГСО перспективных отечественных КА и для формирования траекторий перспективных отечественных межпланетных КА, а на основе ИД – в составе маршевых ЭРДУ перспективных межпланетных КА и исполнительных органов систем управления движением.

2.) Исполнительное планирование. Виды разрабатываемых документов.

Предметом коллективной деятельности, связанной с планированием космического полета являются:
1. Решение задач, относящихся к баллистическому обеспечению;
2. Определение правил и ограничений исполнительного планирования;
3. Сбор и формализация данных по планированию;
4. Планирование использования ресурсов и работы систем ОК;
5. Определение «окон» выполнения научных экспериментов;
6. Организация рационального режима труда и отдыха космонавтов (РТО);
7. Назначение приоритетов полетным операциям;
8. Разработка плана полетных операций, позволяющих выполнить цели и задачи программы космического полета.
БИЛЕТ №10
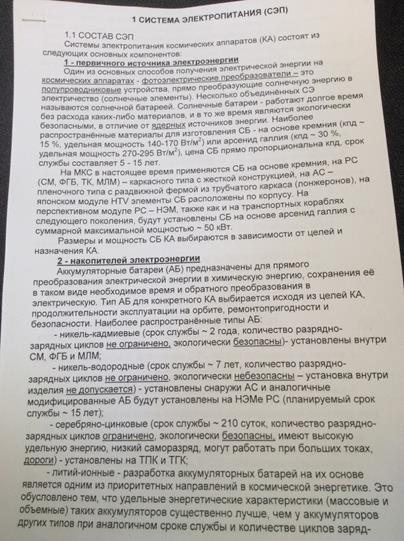
1.Назначение, функциональная схема и принцип работы СЭП, задачи, решаемые при эксплуатации СЭП.
2.Задачи, решаемые НКУ.
Наземный комплекс управления представляет собой систему (рис. 11.1) служб и средств, обладающую наиболее сложной в мире системой связи, включающей кабельные, радиорелейные и спутниковые каналы, большая часть которых арендуется у государственных и коммерческих организаций. Средства НКУ обслуживает персонал, численностью до тысячи человек. К НКУ как к системе предъявляют чрезвычайно высокие требования по быстродействию и надежности, что обусловливает введение автоматизации ее управления
на всех уровнях. Поступление с современных КА больших потоков информации (10 100 Мбит/с) требует включения в состав НКУ широкополосных каналов связи и быстродействующих ЭВМ для обработки этих потоков информации и объединения всех ЭВМ в единую вычислительную сеть с обеспечением межмашинного обмена.
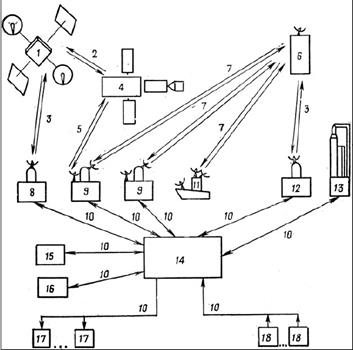
Рис. 11.1. Функциональная схема НКУ: 1 спутник ретранслятор для связи с КА; 2 каналы связи «спутник ретранслятор_ КА»; 3 каналы связи «спутник ретранслятор станция спутниковой связи»; 4 обслуживаемый КА; 5 каналы связи «КА наземная станция слежения»; 6 спутник ретранслятор для связи ЦУП со станциями слежения; 7 каналы связи «станции слежения спутник ретранслятор»; 8 пункт спутниковой связи для управления КА; 9 наземные станции слежения; 10 наземные каналы связи НКУ: 11корабельная станция слежения; 12 пункт спутниковой связи для связи с наземными и корабельными станциями слежения; 13 космодром запуска КА; 14 центр управления полетом (ЦУП); 15 комплексный моделирующий стенд; 16 электрический аналог КА (комплексный стенд); 17 центры обработки научной информации; 18 вспомогательные службы управления полетом