
Рисунок 10. Схема универсального коммутатора шагового двигателя (с реверсом)








Схема на Рисунке 10 пригодна для любых типов двигателей (униполярных и биполярных). Частота вращения двигателя задается внешним тактовым генератором (скважность любая), сигнал с которого подается на вход «ШАГИ», а направление вращения устанавливается через вход «НАПРАВЛЕНИЕ». Оба сигнала имеют логические уровни и, если для их формирования используются выходы с открытым коллектором, то потребуются соответствующие резисторы подтяжки (на Рисунке 10 они не показаны).
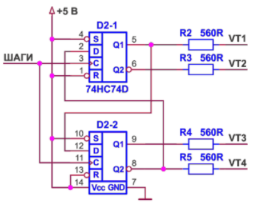
Рисунок 12. Упрощенная схема коммутатора шагового двигателя (без реверса)
Если нет необходимости в реверсе, то схема коммутатора может быть значительно упрощена (см. Рисунок 12), при этом частота вращения останется неизменной.
28. Классификация и схемы включения информационных датчиков.
Используемые датчики весьма разнообразны и могут быть классифицированы по различным признакам:
В зависимости от вида входной (измеряемой) величины различают: датчики механических перемещений (линейных и угловых), пневматические, электрические, расходомеры, датчики скорости, ускорения, усилия, температуры, давления и др.
В настоящее время существует приблизительно следующее распределение доли измерений различных физических величин в промышленности: температура – 50%, расход (массовый и объемный) – 15%, давление – 10%, уровень – 5%, количество (масса, объем) – 5%, время – 4%, электрические и магнитные величины – менее 4%.
По виду выходной величины, в которую преобразуется входная величина, различают неэлектрические и электрические: датчики постоянного тока (ЭДС или напряжения), датчики амплитуды переменного тока (ЭДС или напряжения), датчики частоты переменного тока (ЭДС или напряжения), датчики сопротивления (активного, индуктивного или емкостного) и др.
Большинство датчиков являются электрическими. Это обусловлено следующими достоинствами электрических измерений:
- электрические величины удобно передавать на расстояние, причем передача осуществляется с высокой скоростью;
- электрические величины универсальны в том смысле, что любые другие величины могут быть преобразованы в электрические и наоборот;
- они точно преобразуются в цифровой код и позволяют достигнуть высокой точности, чувствительности и быстродействия средств измерений.
По принципу действия датчики можно разделить на два класса: генераторные и параметрические (датчики-модуляторы). Генераторные датчики осуществляют непосредственное преобразование входной величины в электрический сигнал.
Параметрические датчики входную величину преобразуют в изменение какого-либо электрического параметра (R, L или C) датчика.
По принципу действия датчики также можно разделить на омические, реостатные, фотоэлектрические (оптико-электронные), индуктивные, емкостные и д.р.
Различают три класса датчиков:
- аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал, пропорционально изменению входной величины;
- цифровые датчики, генерирующие последовательность импульсов или двоичное слово;
- бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: "включено/выключено" (иначе говоря, 0 или 1); получили широкое распространение благодаря своей простоте.
Последовательная схема включения состоит из источника питания постоянного или переменного тока, самого датчика Rx, измерительного прибора или непосредственно исполнительного элемента и, обычно, добавочного сопротивления Rд, которое ограничивает ток в этой цепи (рис. 1). Подобная схема включения, чаще всего, находит широкое применение лишь с контактными датчиками, для которых Rх=0 или же Rх=?.
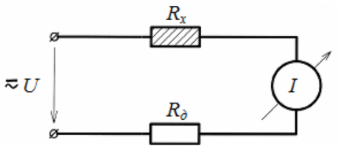
Рис. 1. Последовательная схема включения датчиков
Так как, при работе с другими датчиками в цепи измерительного прибора всегда протекает электрический ток, определяемый выражением I = U/(Rх + Rд), а незначительное изменение внутреннего сопротивления датчика приводит к очень малому изменению этого тока. В результате используется минимальный участок шкалы измерительного прибора, а точность измерения практически сводится к нулю. Поэтому для большинства других датчиков применяются специальные измерительные схемы, позволяющие значительно увеличить чувствительность и точность измерения.
Наиболее часто используется мостовая схема включения, при которой один, а иногда и несколько датчиков определенным образом соединяются совместно с дополнительными резисторами в четырехугольник (так называемый мост Уинстона), у которого имеются две диагонали (рис.2). Одна из них, называемая диагональю питания a-b, предназначена для подключения источника постоянного или переменного тока, а в другую, измерительную диагональ c-d, включается измерительный прибор.
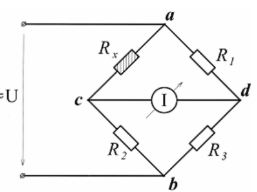
Рис. 2. Мостовая схема включения датчиков
При равенстве произведений величин сопротивлений противоположных сторон четырехугольника (плеч мостовой схемы) Rх х R3 = R1х R2потенциалы точек c и d будут равны, и ток в измерительной диагонали будет отсутствовать. Такое состояние мостовой схемы принято называть равновесием моста, т.е. мостовая схема сбалансирована.
Если же сопротивление датчика Rх от внешнего воздействия изменится, то равновесие будет нарушено и по измерительному прибору будет протекать ток, пропорциональный изменению этого сопротивления. При этом направление этого тока показывает, как изменилось сопротивление датчика (возросло или уменьшилось). Здесь при соответствующем выборе чувствительности измерительного прибора может использоваться вся его рабочая шкала.
Рассмотренная мостовая схема называется неравновесной, так как процесс измерения производится при разбалансе моста, т.е. нарушении равновесия. Неравновесная мостовая схема чаще всего используется в тех случаях, когда сопротивление датчика при воздействии внешних сил может изменяться за единицу времени очень быстро, но тогда вместо измерительного прибора целесообразнее использовать регистрирующее устройство, которое и зафиксирует эти изменения.
Более чувствительной считается равновесная мостовая схема, в которой в два смежных плеча дополнительно подключается специальный измерительный реостат R (рис.3), оснащенный шкалой и называемый в измерительной технике реохордом.
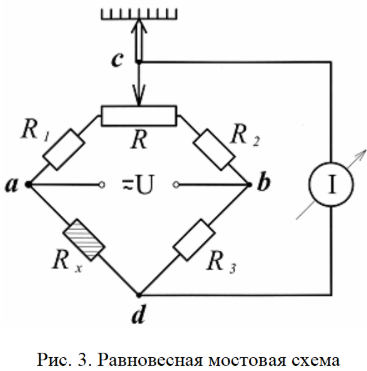
В работе с такой схемой, при каждом изменении сопротивления датчика мостовая схема должна быть вновь уравновешена с помощью включенного реохорда, т.е. до отсутствия тока в измерительной диагонали. В этом случае, значение измеряемого параметра (изменение величины сопротивления датчика) определяется по специальной шкале, которой оснащается этот реохорд и проградуированной в единицах измеряемой датчиком величины.
Более высокая точность равновесного моста объясняется тем, что отсутствие тока в измерительном приборе зафиксировать легче, чем непосредственно измерить его величину, а уравновешивание моста в подобных случаях, как правило, выполняется с помощью специального электродвигателя, управляемого сигналом разбаланса мостовой схемы.
Мостовые схемы включения датчиков считаются универсальными, т.к. питание их может осуществляться как постоянным, так и переменным током, а самое главное, в эти схемы могут включаться одновременно несколько датчиков, что способствует повышению не только чувствительности, но и точности измерения.
Дифференциальная схема включения датчиков строится с использованием специального трансформатора, питаемого от сети переменного тока, вторичная обмотка которого разделена на две одинаковые части. Таким образом, в этой схеме (рис. 4) образуются два смежных контура электрической цепи, по каждому из которых протекает свой контурный ток I1 и I2. А величина тока в измерительном приборе определяется разностью этих токов, и при равенстве сопротивлений датчика Rx и дополнительного резистора Rд ток в измерительном приборе будет отсутствовать.
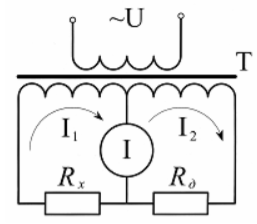
Рис. 4. Дифференциальная схема включения датчиков
При изменении сопротивления датчика по измерительному прибору потечет ток, пропорциональный этому изменению, а фаза этого тока будет зависеть от характера
изменения этого сопротивления (увеличения или уменьшения). Для питания дифференциальной схемы используется только переменный ток и поэтому в качестве датчиков здесь целесообразнее использовать реактивные датчики (индуктивные или емкостные).
Особенно удобно применять такую схему включения при работе с дифференциальными индуктивными или емкостными датчиками. При использовании подобных датчиков, фиксируется не только величина перемещения, например, ферромагнитного сердечника (рис.5), но и направление этого перемещения (его знак), в результате чего изменяется фаза переменного тока, проходящего по измерительному прибору. При этом дополнительно, увеличивается и чувствительность измерения.
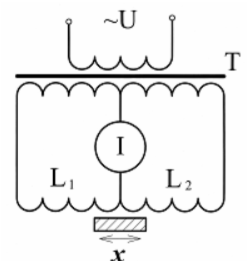
Рис. 5. Схема включения индуктивного дифференциального датчика
Следует отметить, что для увеличения точности измерения в некоторых случаях применяют другие разновидности подобных измерительных схем, например, равновесные дифференциальные схемы. В такие схемы включают либо реохорд, либо специальный измерительный автотрансформатор со специальной шкалой, а процесс измерения с подобными схемами аналогичен измерениям с равновесной мостовой схемой.
Компенсационная схема включения датчиков считается самой точной из всех рассмотренных выше. Работа ее основана на компенсации выходного напряжения или э.д.с. датчика равным ему падением напряжения на измерительном реостате (реохорде). Для питания компенсационной схемы используется только источник постоянного тока и применяется она, в основном, с генераторными датчиками постоянного тока.
Рассмотрим работу этой схемы на примере использования в качестве датчика термопары (рис. 6).
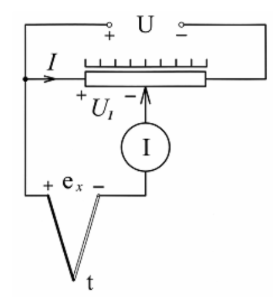
Рис. 6. Компенсационная схема включения термоэлектрического датчика
Под действием приложенного напряжения U по измерительному реостату протекает ток, который вызывает падение напряжения U1 на участке реостата от его левого вывода до движка. В случае равенства этого напряжения и э.д.с. термопары – ех ток через измерительный прибор будет отсутствовать.
Если величина э.д.с. датчика изменяется, необходимо с помощью движка реохорда снова добиваться отсутствия этого тока. Здесь, как и в равновесной мостовой схеме, величина измеряемого параметра, в нашем случае – температуры (э.д.с. термопары) определяется по шкале реохорда, а перемещение его движка выполняется, чаще всего, также с помощью специального электродвигателя.
Высокая точность компенсационной схемы обусловлена тем, что в момент измерения электрическая энергия, вырабатываемая датчиком, не потребляется, так как ток в цепи его включения равен нулю. Эту схему можно применять и с параметрическими датчиками, но тогда необходим дополнительный источник постоянного тока, используемый в цепи питания параметрического датчика.
29. Электрические аппараты (релейно-контактная и защитная аппаратура)
Автоматическое управление с применением реле, контакторов, магнитных пускателей, а также различных механических переключающих устройств называют релейно-контактным управлением. Замыкание или размыкание электрических цепей происходит в этом случае механическими контактами, которые приводятся в движение теми или иными способами.
Основу аппаратуры релейно-контактного управления составляют реле и контакторы. Применяются также магнитные пускатели – разновидности контакторов, а также автоматические воздушные выключатели – электромеханические устройства для нечастых включений и отключений электрических цепей и защиты их при коротких замыканиях и длительных перегрузках.
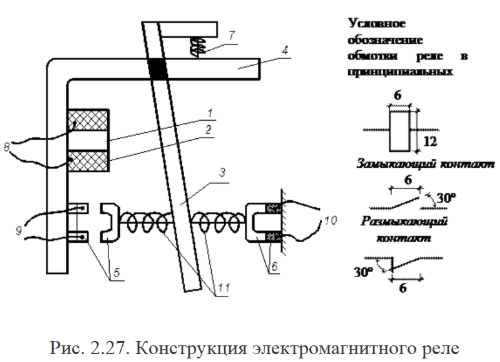
Электромагнитное реле – электромеханическое устройство, замыкающее или размыкающее электрические контакты под воздействием управляющего сигнала. Отечественной промышленностью выпускаются различные типы электромагнитных реле, отличающихся по конструкции, назначению и принципу действия.
Электромагнитное реле состоит из сердечника 1 (рис. 2.27), катушки 2, якоря 3, кронштейна 4, замыкающих и размыкающих контактов 5 и 6 и возвратной пружины 7. Выводы 8 катушки реле и контактов 9 и 10 подсоединяются к соответствующим цепям управления. При протекании тока через обмотку 2 сердечник 1 намагничивается и притягивает якорь 3. Механическое движение якоря приводит к замыканию контакта 5 и размыканию контакта 6. В результате происходит замыкание или размыкание электрической цепи. Контакты реле замыкают или размыкают преимущественно цепи управления, где ток не превышает нескольких ампер. На схеме 11 – амортизирующие пружины.
В зависимости от времени срабатывания контактов различают реле мгновенного действия и реле с выдержкой времени. В реле мгновенного действия контакты замыкаются (или размыкаются) практически сразу после поступления напряжения на катушку реле (или после исчезновения напряжения на катушке).
В реле с выдержкой времени контакты замыкаются или размыкаются не сразу после поступления на реле сигнала управления, а с некоторой выдержкой времени. Применение контактов реле с выдержкой времени вызвано практической необходимостью. Реле с
выдержкой времени используются, например, при автоматическом управлении пуском асинхронных двигателей с фазным ротором в крановых механизмах, конвейерах и других случаях, где требуется создать выдержку времени, необходимую для работы того или иного механизма.
 Наиболее простым способом выдержка времени (до 10-12 с) при отпускании реле может быть создана, например введением медной гильзы между обмоткой реле и сердечником. Выдержку времени можно создать и другими способами, например вводя часовой механизм в конструкцию реле. Такие реле называются маятниковыми реле времени.
Наиболее простым способом выдержка времени (до 10-12 с) при отпускании реле может быть создана, например введением медной гильзы между обмоткой реле и сердечником. Выдержку времени можно создать и другими способами, например вводя часовой механизм в конструкцию реле. Такие реле называются маятниковыми реле времени.
В некоторых типах реле времени имеется кулачковый распределительный валик, который приводится во вращение электродвигателем небольшой мощности. При вращении валика кулачковым механизмом замыкаются или размыкаются контакты в определённой последовательности через соответствующие промежутки времени. В таких реле выдержка времени может исчисляться от нескольких секунд до нескольких часов. Примером такой конструкции может быть электрический прибор КЭП-12, применяющийся при автоматизации, например вентиляционных установок.
В отдельных случаях электромагнитные реле могут выполнять функцию защиты электроустановок.
Такую функцию выполняют реле максимального тока. Эти реле срабатывают при коротких замыканиях в электрических цепях и настраиваются на ток в обмотке реле, превышающий номинальный в 2-2,5…11 раз.
Для защиты электроустановок при длительных перегрузках применяются реле тепловые. Эти реле, в отличие от электромагнитных, катушек не имеют. В конструкцию теплового реле (рис. 2.28) входит нагревательный элемент (нихромовая пластина или отрезок нихромовой проволоки) 4, включаемый в цепь главного тока, биметаллическая пластина 1, представляющая продольный спай инваровой и стальной пластин, защёлка 2, контактная система 3, основание 6. Если в цепи нагревательного элемента ток длительно превышает номинальный на 20-25 %, то происходит нагревание этого элемента, биметаллическая пластина нагревается и за счёт различного коэффициента линейного расширения инвара и стали изгибается, освобождая защёлку. Контакты 3 под действием пружины 7 размыкаются, в результате происходит отключение электроустановки от питающей сети. После остывания нагревательного элемента ибиметаллической пластины контакт теплового реле может быть возвращён в исходное рабочее состояние кнопкой возврата 5.
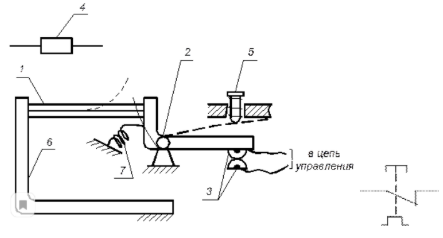
Рис. 2.28. Конструкция теплового реле:
а – схема реле; б – условное обозначение контакта теплового реле в электрических схемах