Принцип действия шаговых двигателей всех типов состоит в следующем.








С помощью электронного коммутатора вырабатываются импульсы напряжения, которые подаются на обмотки управления, расположенные на статоре шагового двигателя.
В зависимости от последовательности возбуждения обмоток управления происходит то или иное дискретное изменение магнитного поля в рабочем зазоре двигателя. При угловом перемещении оси магнитного поля обмоток управления шагового двигателя его ротор дискретно поворачивается вслед за магнитным полем. Закон поворота ротора определяется последовательностью, скважностью и частотой управляющих импульсов, а также типом и конструктивными параметрами шагового двигателя.
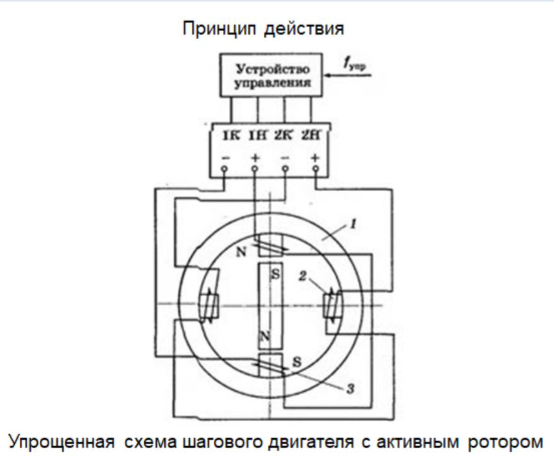
Рассмотрим работу шагового двигателя, предположив, что в начальный момент напряжение подано на обмотку 3. Ток в этой обмотке вызовет намагничивание вертикально расположенных полюсов N и 8. В результате взаимодействия магнитного поля с постоянным магнитом ротора последний займет равновесное положение, в котором оси магнитных полей статора и ротора совпадают.
Положение будет устойчивым, поскольку на ротор действует синхронизирующий момент, стремящийся возвратить ротор в положение равновесия:
М = Мmах * sinα,
где Мmах - максимальный момент, α - угол между осями магнитных полей статора и ротора.
При переключении блоком управления напряжения с обмотки 3 на обмотку 2 образуется магнитное поле с горизонтальными полюсами, т.е. магнитное поле статора совершает дискретный поворот на четверть окружности статора. При этом между осями статора и ротора появится угол рассогласования α = 90° и на ротор будет действовать максимальныйвращающий момент Мшах. Ротор повернется на угол α = 90° и займет новое устойчивое положение. Таким образом, вслед за шаговым перемещением поля статора совершает шаговое перемещение ротор двигателя.
25. Статические характеристики шаговых двигателей
В шаговых двигателях НС статора перемещается по окружности статора не плавно, как в обычных синхронных двигателях, а скачкообразно. Последнее обуславливает ряд особенностей ШД.
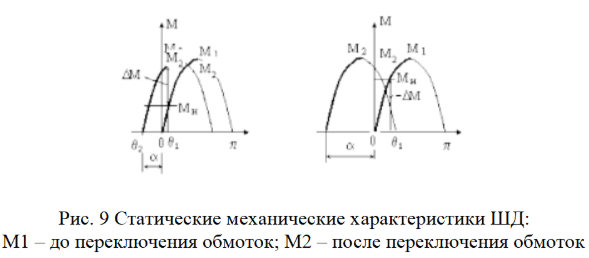
Допустим, что ротор ШД, нагруженного моментомМн, имел угол рассогласования q1. Произошло переключение обмоток статора и НС скачком переместилась на угол a , равный шагу двигателя (рис. 9,а). На такой же угол переместится и кривая синхронизирующего момента. В данном случае момент ШД возрасте на величину DM, вследствие чего ротор начнет перемещаться в новое положение. Когда ротор повернется на угол a, превышение момента станет равным нулю. Система придет в новое согласованное положение с углом рассогласования q2. Однако такое перемещение ротора возможно, если переключение обмоток статора не переводит ШД в зону неустойчивой работы. Если же угол a, т.е. шаг будет
большим (рис. 9,б), то момент двигателя станет меньше момента нагрузки, ротор перейдет в зону неустойчивой части угловой характеристики, он не будет следовать за полем статора и потеряет шаг – произойдет сбой в работе. Для того, чтобы двигатель не терял шаг, необходимо, чтобы выполнялось определенное соотношение между максимальным синхронизирующим моментом Мmax, моментом сопротивленияМн и числом устойчивых положений n: Mн<Mmaxcos(p/n). Чем больше n (мельче шаг), тем большим моментом можно нагружать ШД.
26. Динамические характеристики шаговых двигателей
Предельная динамическая характеристика – зависимость частоты приемистостиот момента сопротивления и момента инерции нагрузки. Такие характеристикиназываются предельными динамическими характеристиками пуска. Существуюттакже предельные динамические характеристики реверса и торможения.
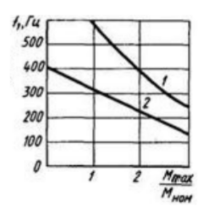
2 – предельная динамическая характеристика приемистости.
Приемистость — это наибольшая частота управляющих импульсов, при которой не происходит потери или добавления шага при их отработке. Она является основным показателем переходного режима шагового двигателя. Приемистость растет с увеличением синхронизирующего момента, а также с уменьшением шага, момента инерции вращающихся (или линейно перемещаемых) частей и статического момента сопротивления. Приемистость падает с увеличением нагрузки.
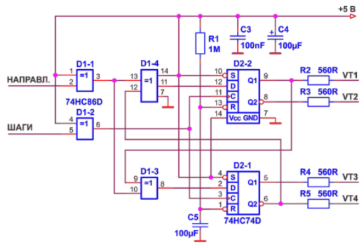
27. Схемы построения коммутаторов для шаговых двигателей
Режим управления двигателем задается коммутатором. наиболее удобным и эффективным является управление с перекрытием фаз .Такой режим легко реализуется при помощи триггеров. Практическая схема универсального коммутатора как в ряде отладочных, так и для практических применений, приведена на Рисунке 10.