
Запуск двигателей с короткозамкнутым ротором








Для уменьшения пускового тока можно на время понизить напряжение на зажимах статора, включив для этого последовательно с его обмоткой трехфазное индуктивное сопротивление (рис. 10).
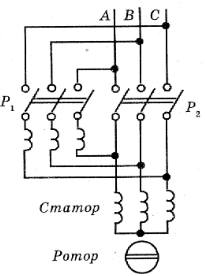
Рис. 10. Пуск асинхронного двигателя с помощью сопротивлений, последовательно включаемых с обмотками статора
При пуске замыкается рубильник Р1ик обмоткам статора последовательно
подключаются индуктивности, что значительно уменьшает пусковой ток.
Когда скорость двигателя приближается к номинальной, замыкается рубильник P2— он закорачиваеткатушки индуктивности, и статор включается на полное напряжение сети. Уменьшение пускового тока, вызванное понижением напряжения на статоре, вызывает уменьшение пускового момента пропорционально квадрату напряжения на статоре. Например, при таком пуске уменьшение пускового тока в 2 раза будет сопровождаться уменьшением пускового момента в 4 раза. Для понижения напряжения на статоре вместо индуктивных сопротивлений можно использовать активные сопротивления реостатов, но это менее выгодно, так как связано с дополнительными потерями энергии в реостатах.Мощные двигатели часто запускают с помощью автотрансформатора.
9. Способы управления АД
Под управлением асинхронным двигателем переменного тока понимается изменение частоты вращения ротора и/или его момента.
Существуют следующие способы управления асинхронным двигателем:
· реостатный — изменение частоты вращения асинхронного двигателя с фазным ротором путём изменения сопротивления реостата в цепи ротора, кроме того это увеличивает пусковой момент и повышает критическое скольжение;
· частотный — изменение частоты вращения асинхронного двигателя путём изменения частоты тока в питающей сети, что влечёт за собой изменение частоты вращения поля статора. Применяется включение двигателя через частотный преобразователь;
· переключением обмоток со схемы «звезда» на схему «треугольник» в процессе пуска двигателя, что даёт снижение пусковых токов в обмотках примерно в три раза, но в то же время снижается и момент;
· импульсный — подачей напряжения питания специального вида (например, пилообразного);
· введение добавочной ЭДС согласно или противонаправлено с частотой скольжения во вторичную цепь;
· изменением числа пар полюсов, если такое переключение предусмотрено конструктивно (только для короткозамкнутых роторов);
· изменением амплитуды питающего напряжения, когда изменяется только амплитуда (или действующее значение) управляющего напряжения. Тогда вектора напряжений управления и возбуждения остаются перпендикулярны (автотрансформаторный пуск);
· фазовое управление характерно тем, что изменение частоты вращения ротора достигается путём изменения сдвига фаз между векторами напряжений возбуждения и управления;
· амплитудно-фазовый способ включает в себя два описаных способа;
· включение в цепь питания статора реакторов;
· индуктивное сопротивление для двигателя с фазным ротором.
10. Управление трехфазным АД
Способы подключения асинхронного электродвигателя к сети питания:
· прямое подключение к сети питания
· подключение от устройства плавного пуска
· подключение от преобразователя частоты
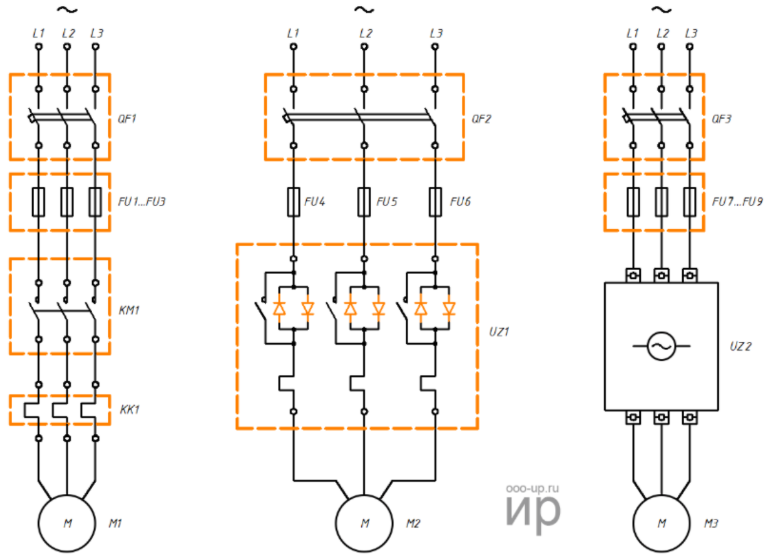
Варианты подключения асинхронного электродвигателя с помощью магнитного пускателя (слева), устройства плавного пуска (посеридине) и частотного преобразователя (справа). Схемы представлены в упрощенном виде. FU1-FU9 - плавкие предохранители, KK1 - тепловое реле, KM1 - магнитный пускатель, L1-L3 - контакты для подключения к сети трехфазного переменного тока, M1-M3 - асинхронные электродвигатели, QF1-QF3 - автоматические выключатели, UZ1 - устройство плавного пуска, UZ2 - преобразователь частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
· нереверсивного пуска: пуск и остановка;
· реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
Использование частотного преобразователя позволяет:
· уменьшить энергопротребление электродвигателя;
· управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
· избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
Источник : https://engineering-solutions.ru/motorcontrol/induction3ph/#control
11. Частотно-токовое управление АД с автономным инвертором
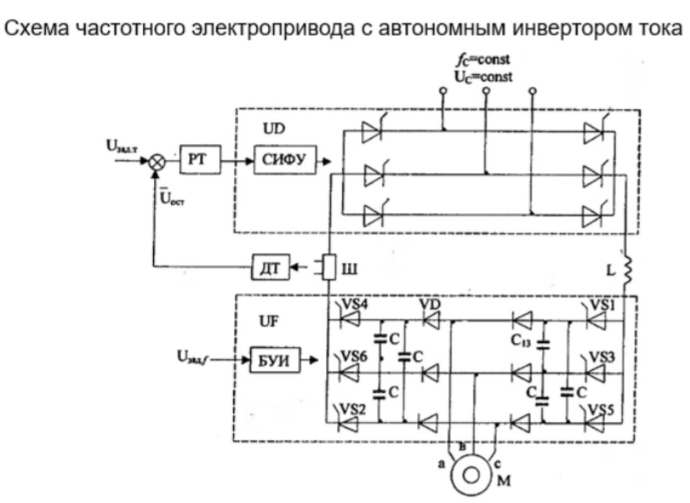
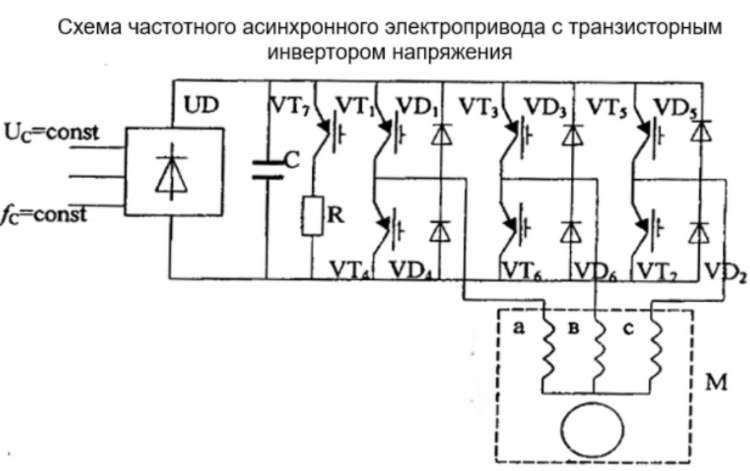
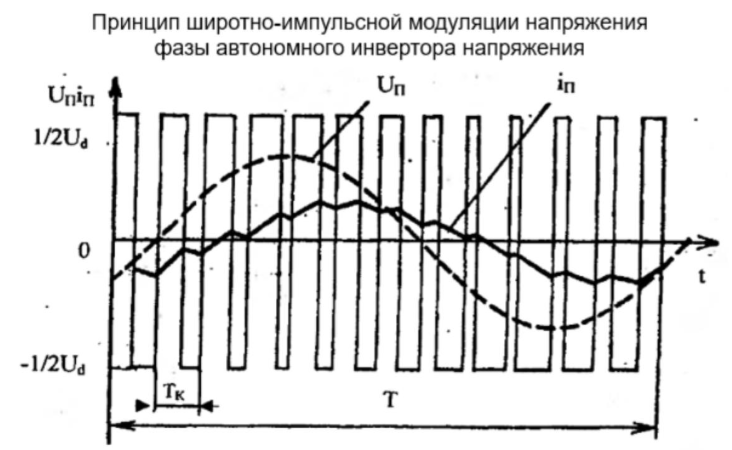
В последние годы наблюдается повышенный интерес к асинхронному электроприводу (ЭП) с автономным инвертором тока (АИТ) с широтно-импульсной модуляцией (ШИМ), что вызвано его существенными достоинствами [1–4]:
во-первых, – простотой реализации режима рекуперации энергии в питающую сеть (осуществляется посредством одного комплекта нереверсивного управляемого выпрямителя);
во-вторых, – пониженной крутизной фронтов статорных напряжений двигателя (в сравнении с ЭП на основе автономного инвертора напряжения с ШИМ), что позволяет исключить недопустимые перенапряжения на обмотках двигателя (которые, как известно, отрицательно влияют на их изоляцию) и заметно продлить общий срок его службы в эксплуатации [5];
в-третьих, – отсутствие электролитического конденсатора в звене постоянного тока преобразователя частоты (ПЧ), что упрощает защиту преобразователя в аварийных режимах и повышает надежность работы электропривода в целом
12. Области применения электрических приводов с синхронными двигателями
Синхронные электрические двигатели с успехом используются в качестве источников реактивной мощности в узлах нагрузки для поддержания стабильного уровня напряжения. Довольно часто двигатели с синхронным принципом действия используются в качестве силовых машин в компрессорных установках большой производительности.
Мощные двигатели выполняются с использованием системы встречной вентиляции, при которой лопасти вентилятора расположены на роторе. Экономичный и надежный синхронный двигатель обеспечивает производительную и экономичную работу насосного оборудования.
Важной характеристикой синхронных электрических машин является сохранение постоянной скорости вращения, что важно для вращения приводов в виде насосов, компрессоров, вентиляторов, и различных генераторов переменного тока. Ценным также является возможность регулирования реактивного тока за счет вариаций тока возбуждения обмоток якоря. Благодаря этому увеличивается показатель косинуса φ при всех диапазонах работы, что увеличивает кпд двигателей и снижает потери в электрических сетях.
Сами двигатели с синхронным принципом действия устойчивы к колебаниям напряжения в сети, и обеспечивают постоянство скорости вращения при их возникновении. Синхронные электродвигатели при понижении питающего напряжения сохраняют большую перегрузочную способность, по сравнению с асинхронными. Способность к форсированию тока возбуждения при понижениях напряжения повышает надежность их работы при аварийных снижениях питающего напряжения в электрической сети.
Синхронные электрические машины рентабельны при мощностях свыше 100 кВт и основное применение находят для вращения мощных вентиляторов, компрессоров и других силовых установок. В качестве недостатков синхронных машин можно отметить их конструктивную сложность, наличие внешнего возбуждения обмоток ротора, сложность запуска и довольно высокие стоимостные характеристики.
Принцип действия синхронного электродвигателя основывается на взаимодействии вращения магнитного поля якоря с магнитными полями полюсов индуктора. Якорь обычно располагается на статоре, а индуктор на подвижном роторе. При больших мощностях полюсами служат электромагниты, при этом постоянный ток подается на ротор через скользящие кольцевые контакты.
В маломощных двигателях используются постоянные магниты, расположенные на роторе. Существуют также синхронные машины с обращенным принципом работы, когда якорь размещен на роторе, а индуктор на статоре. Однако такая конструкция применяется в двигателях старых конструкций.
Синхронные электрические машины могут работать в генераторном режиме, когда якорь расположен на статоре для удобства отбора генерируемого электричества. На этом принципе основаны мощные генераторы, работающие на гидроэлектростанциях.
13. Принцип работы электрических приводов с синхронными двигателями
Синхронный электродвигатель – это устройство, преобразующее электрическую энергию в механическую. Его также можно использовать в качестве генератора.
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.

При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию. При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток. Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение.
Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от
постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
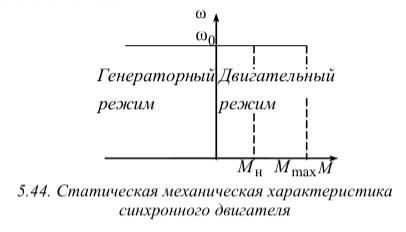
14. Статические характеристики электрических приводов с синхронными двигателями
Статическая механическая характеристика синхронного двигателя (рис. 5.44) имеет вид горизонтальной прямой параллельной оси моментов. Если момент нагрузки превысит значение Mmax, то синхронный двигатель выпадает из синхронизма. Для определения максимального момента синхронного двигателя Mmax служит угловая характеристика. Угловой характеристикой синхронного двигателя называется зависимость момента M от внутреннего угла поворота ротора синхронного двигателя θ , представляющего собой угол сдвига между вектором ЭДС статора  и вектором фазного напряжения
и вектором фазного напряжения  питающей сети или, что то же самое, угол сдвига между осью магнитного поля, созданного обмотками статора синхронного двигателя, и осью его полюсов.
питающей сети или, что то же самое, угол сдвига между осью магнитного поля, созданного обмотками статора синхронного двигателя, и осью его полюсов.

15. Динамические характеристики электрических приводов с синхронными двигателями
Переходные процессы в тяговом приводе с синхронными электрическими машинами могут быть вызваны как изменениями управляющих воздействий (например, в режимах пуска и торможения), так и возмущениями в механической части, возникающими, например, при прохождении транспортным средством неровностей путевой структуры.
при изменении нагрузки скачком, скорость синхронного электропривода совершает затухающие колебания относительно скорости поля, а его момент колеблется относительно момента Мс, постепенно затухая. Коэффициент затухания возрастает при увеличении жесткости механической характеристики β, т.е. при уменьшении Тм
Наличие демпферной обмотки позволяет осуществлять пуск синхронного двигателя путем прямого включения его на напряжение сети. Параметры этой обмотки рассчитываются так, чтобы обеспечивались удовлетворительные условия пуска при заданном максимальном значении нагрузки Мс.max, а значения входного скольжения (скольжения, при котором происходит втягивание в синхронизм) лежали в допустимых пределах  .
.
Пусковые характеристики показаны на рис. 6.31. Характеристика 1 соответствует относительно небольшому сопротивлению демпферной обмотки, при этом критическое скольжение мало, что увеличивает жесткость рабочего участка механической характеристики и уменьшает пусковой момент М п . Характеристика 2 соответствует повышенному сопротивлению этой обмотки, поэтому имеет сниженную жесткость рабочего участка, но больший пусковой момент М п .

Рис. 6.31. Пусковые механические характеристики синхронного двигателя
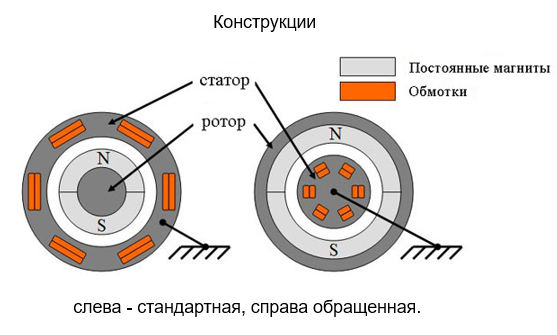
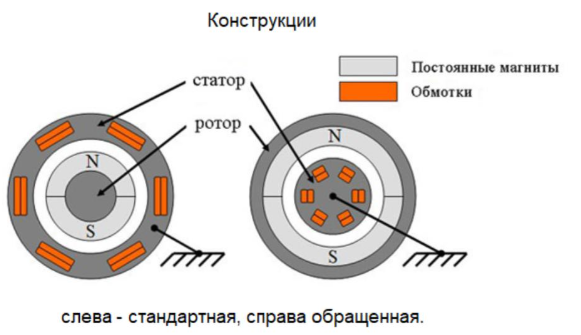
16. Синхронный двигатель с постоянными магнитами (СДПМ). Конструкции СДПМ.
Синхронный двигатель с постоянными магнитами - это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов.
Устройство синхронного двигателя
Синхронный электродвигатель с постоянными магнитамисостоит из ротора и статора. Статор - неподвижная часть, ротор - вращающаяся часть.
Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
По конструкции ротора синхронные двигатели делятся на:
· электродвигатели с явно выраженными полюсами;
· электродвигатели с неявно выраженными полюсами.
Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
- синхронный двигатель со встроенными (инкорпорированными) магнитами
Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
· с распределенной обмоткой;
· с сосредоточенной обмоткой.
Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться.
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
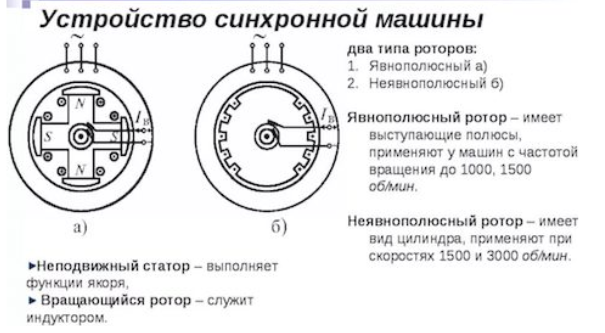
В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
В состав индуктора входят электромагниты постоянного тока,называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и неявнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными. Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
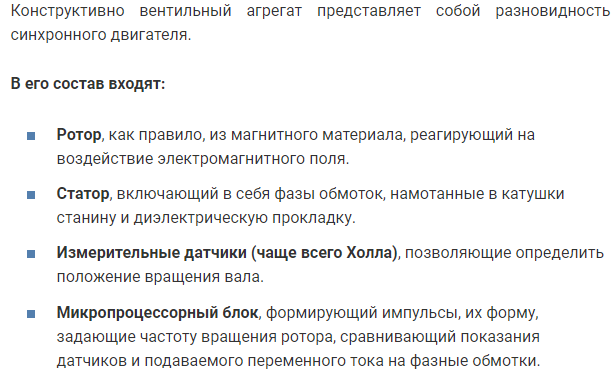
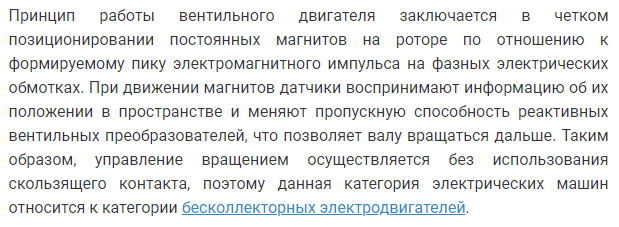
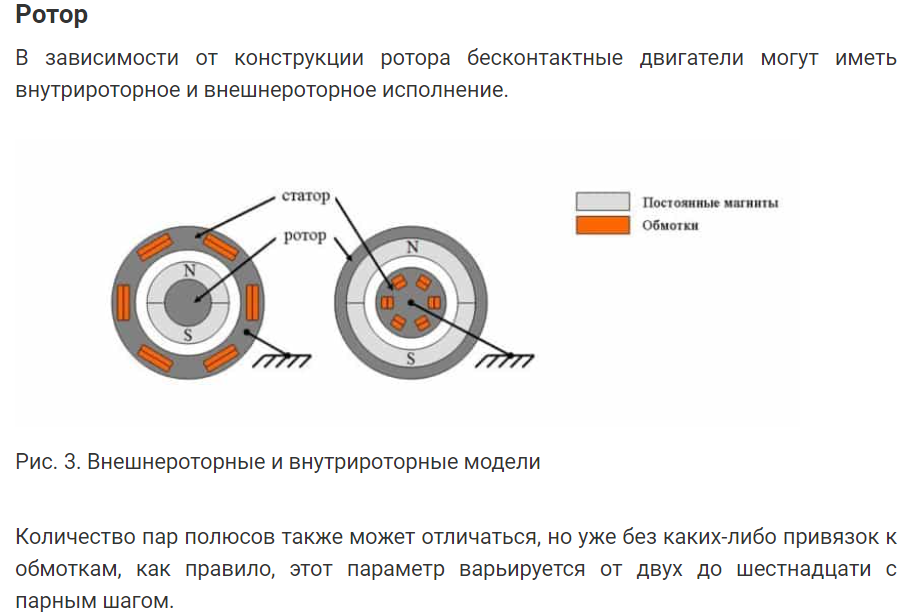
17. Устройство и принцип действия вентильных двигателей.
Вентильный электродвигатель (ВД) — это разновидность электродвигателя постоянного тока, у которого щёточно-коллекторный узел (ЩКУ) заменен полупроводниковым коммутатором, управляемым датчиком положения ротора.
Конструкция и принцип работы:
 Статор
Статор
18. Сервопривод на основе вентильного электродвигателя.
Вентильные двигатели – это синхронные бесколлекторные (бесщёточные) машины.
Типы серводвигателей
· Синхронные
Компактные бесщёточные серводвигатели с возбуждением от постоянных магнитов (вентильные), обеспечивающие высокую динамику и точность.
Синхронные серводвигатели — это трехфазные синхронные электродвигатели с возбуждением от постоянных магнитов и датчиком положения ротора. Отличительная особенность синхронных серводвигателей - высокая выходная мощность при любой скорости в сочетании с небольшими размерами. Их основным достоинством является очень низкий момент инерции ротора относительно крутящего момента. Это позволяет реализовать очень высокое быстродействие. Достижимо время разгона на номинальную частоту вращения за десятки миллисекунд и реверс с полной скорости в пределах одного оборота вала двигателя.
Сервоприводы – это любые механические приводы, которые включают в себя датчик некоторого параметра и блок управления, который способен автоматически поддерживать требуемые параметры, соответствующие определенным внешним значениям.
Функциональная схема сервопривода:
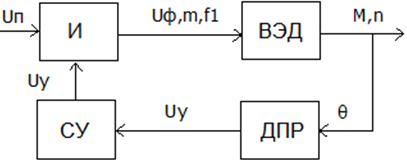
ДПР – датчик положения ротора, ВЭД - вентильный электродвигатель, И- инвертор.
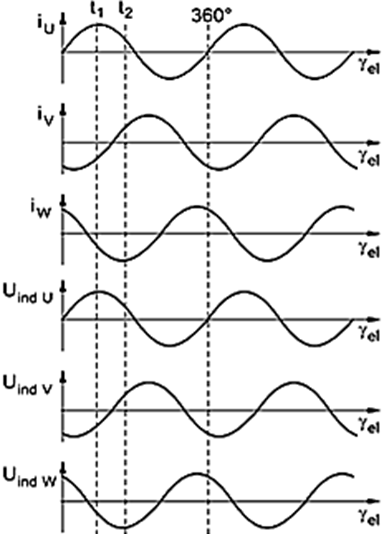
Диаграмма тока, напряжения во времени при постоянной величине напряжения:
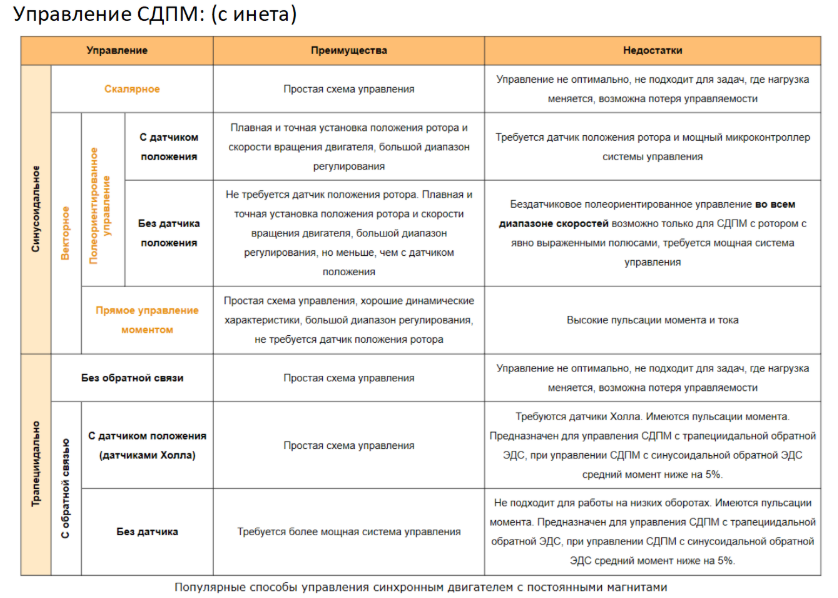
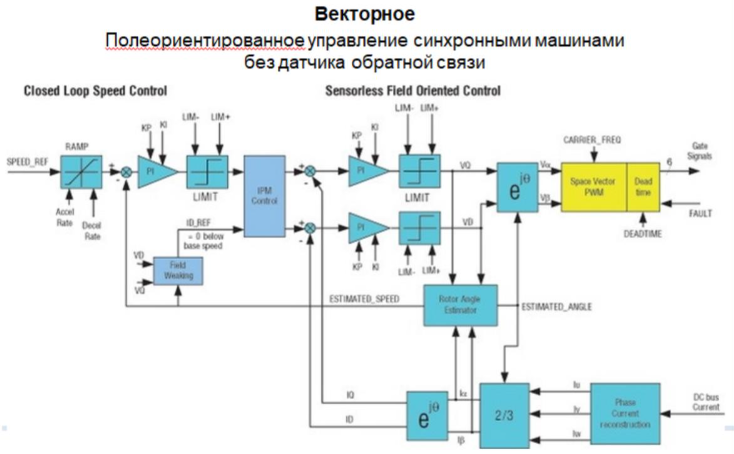
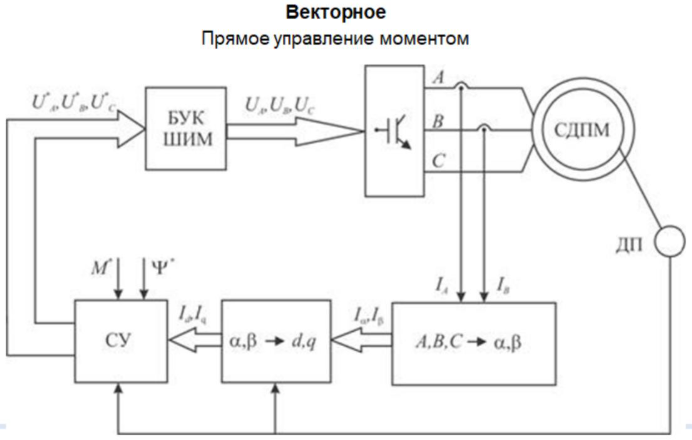
19. Управление синхронным двигателем с постоянными магнитами(СДПМ)
Синхронный двигатель с постоянными магнитами - это синхронный электродвигатель, индуктор которого состоит из постоянных магнитов.
Принцип работы синхронного двигателя Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


20. Основные характеристики регулируемых приводов: точность, диапазон, направление и плавность регулирования, динамические и экономические показатели.
Точность
Одним из важных требований к современным сервоприводам является высокая точность позиционирования, которую сложно обеспечить из-за особенностей передаточных механизмов.
Диапазон
Регулировочный диапазон (диапазон регулирования, глубина регулирования) – это специальная величина, характеризующая минимальную частоту вращения вала электродвигателя, накоторой не будет наблюдаться пульсаций частоты вращения ротора.
Направление и плавность регулирования:
Направление регулирования скорости определяется расположением получаемых искусственных характеристик относительно естественной. Если они располагаются выше естественной, то говорят о регулировании скорости вверх от основной, если ниже – вниз от основной.
Плавность регулирования скорости определяется числом получаемых в данном диапазоне искусственных характеристик: чем их больше, тем регулирование скорости будет осуществляться плавнее. Плавность оценивается коэффициентом, который находится как отношение скоростей на двух ближайших характеристиках
kпл = ωi - ωi-1,
где ωi иωi-1 – скорости на i-й и (i-1) искусственных характеристиках.
Динамические показатели
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.
Экономические показатели
Экономичность регулирования определяется капитальными и эксплуатационными затратами на регулируемый электропривод. Капитальные затраты должны быть по возможности минимальными, или в противном случае такими, чтобы срок окупаемости электропривода не превысил нормативного.
При расчете показателя экономичности регулирования скорости учитываются количество регулируемых скоростей в диапазоне регулирования, активные мощности на валу двигателя при различных скоростях, потери мощности при различных скоростях, время работы электродвигателя на каждой регулируемой скорости, активные и реактивные мощности, потребляемые электродвигателем.
21. Принципы подчиненного регулирования, последовательная коррекция.
В настоящее время к автоматическим системам управления, например, в автоматизированном электроприводе, предъявляются требования высокой точности регулирования и высокого быстродействия. Поэтому преимущественное применение нашёл принцип последовательной коррекции или так называемый принцип подчинённого регулирования координат. Сущность его заключается в следующем.
Объект регулирования представляется в виде последовательно соединённых звеньев , выходными параметрами которых являются регулируемые координаты. Для управления каждой из этих координат применяется отдельный регулятор, образующий с объектом контур, замкнутый соответствующей обратной связью. Регуляторы соединяются последовательно так, что выход одного является входом другого, т.е. каждый внутренний контур регулирования подчинён внешнему. В качестве примера на рис.4.1 представлена двухконтурная схема подчинённого регулирования, включающая
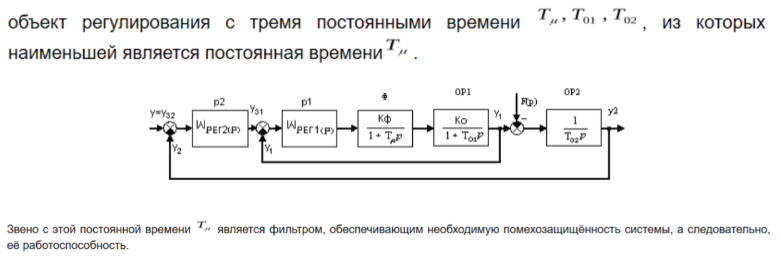 Регулятор каждого контура регулирует одну выходную координату контура и компенсирует одну или две большие постоянные времени объекта регулирования. На вход каждого регулятора подаются два сигнала: сигнал, пропорциональный заданному и действительному значению регулируемой величины. Передаточные функции регуляторов выбираются таким образом, чтобы обеспечить оптимальность контура регулирования. Такую коррекцию называютпоследовательной.
Регулятор каждого контура регулирует одну выходную координату контура и компенсирует одну или две большие постоянные времени объекта регулирования. На вход каждого регулятора подаются два сигнала: сигнал, пропорциональный заданному и действительному значению регулируемой величины. Передаточные функции регуляторов выбираются таким образом, чтобы обеспечить оптимальность контура регулирования. Такую коррекцию называютпоследовательной. 
22. Разомкнутые и замкнутые системы регулирования электроприводов.