14. Статические характеристики электрических приводов с синхронными двигателями 37








Экзаменационные вопросы
«Электрические и гидравлические приводы мехатронных и робототехнических устройств (часть 1)»
Оглавление
1. Типы и конструкция ДПТ. 3
2. Приводы постоянного тока. 6
3. Динамические характеристики ДПТ. 12
4. Принцип работы АД.. 15
5. Основные конструктивные разновидности АД.. 18
6. Механические характеристики АД.. 21
7. Особенности двух- и трехфазных АД.. 22
8. Режимы работы и пуск АД.. 24
9. Способы управления АД.. 28
10. Управление трехфазным АД.. 29
11. Частотно-токовое управление АД с автономным инвертором.. 31
12. Области применения электрических приводов с синхронными двигателями 33
13. Принцип работы электрических приводов с синхронными двигателями. 35
14. Статические характеристики электрических приводов с синхронными двигателями 37
15. Динамические характеристики электрических приводов с синхронными двигателями 38
16. Синхронный двигатель с постоянными магнитами (СДПМ). Конструкции СДПМ. 40
17. Устройство и принцип действия вентильных двигателей. 43
18. Сервопривод на основе вентильного электродвигателя. 46
Типы серводвигателей.. 46
19. Управление синхронным двигателем с постоянными магнитами(СДПМ) 48
20. Основные характеристики регулируемых приводов: точность, диапазон, направление и плавность регулирования, динамические и экономические показатели. 52
21. Принципы подчиненного регулирования, последовательная коррекция. 54
22. Разомкнутые и замкнутые системы регулирования электроприводов. 56
23. Сервоприводы. 59
24. Принцип работы шаговых двигателей. 61
25. Статические характеристики шаговых двигателей. 63
26. Динамические характеристики шаговых двигателей. 64
27. Схемы построения коммутаторов для шаговых двигателей. 65
28. Классификация и схемы включения информационных датчиков. 67
29. Электрические аппараты (релейно-контактная и защитная аппаратура) 73
1. Типы и конструкция ДПТ
https://youtu.be/_-h_QoT1fDw
https://samelectrik.ru/vidy-elektricheskix-dvigatelej-i-ix-razlichiya.html
Типы электродвигателей
· Коллекторные двигатели постоянного тока
Коллекторная машина - вращающаяся электрическая машина, у которой хотя бы одна из обмоток, участвующих в основном процессе преобразования энергии, соединена с коллектором. В коллекторном двигателе щеточно-коллекторный узел выполняет функцию датчика положения ротора и переключателя тока в обмотках.
Состоят из магнитов или катушки возбуждения и якоря, ток к обмотке якоря передаётся с помощью щеточного узла, недостатком которого является постепенный износ.
Коллекторные двигатели можно разделить на группы по типу возбуждения:
ü с самовозбуждением;
- Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения);
- Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения);
- Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть - параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики).
ü с независимым возбуждениемот электромагнитов и постоянных магнитов.
· Универсальный коллекторный электродвигатель
Может работать на переменном и постоянном токе. Широко используется в ручном электроинструменте и в некоторых бытовых приборах (в пылесосах, стиральных машинах и др.). Получил большое распространение благодаря небольшим размерам, относительно низкой цены и легкости управления.
· Бесколлекторные (или бесщеточные) электродвигатели
У бесколлекторных электродвигателей могут быть контактные кольца с щетками, таким образом не надо путать бесколлекторные и бесщеточные электродвигатели.
Бесщеточная машина - вращающаяся электрическая машина, в которой все электрические связи обмоток, участвующих в основном процессе преобразования энергии, осуществляются без скользящих электрических контактов.
Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя. 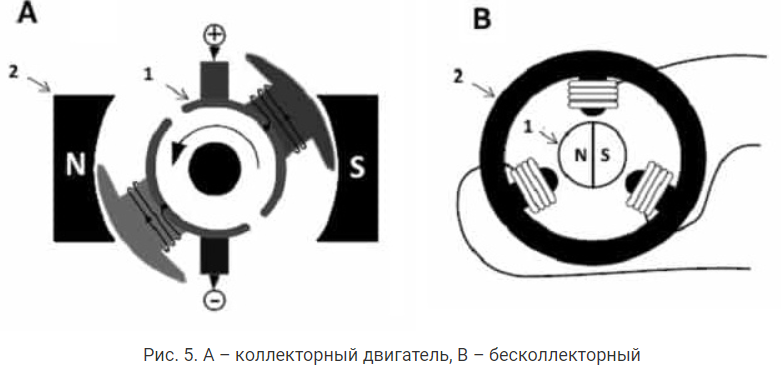
1- Ротор, 2- статор
Конструкция ДПТ
Электродвигатель постоянного тока – устройство, которое с помощью двух своих основных деталей конструкции может преобразовывать электрическую энергию в механическую. К основным деталям относятся:
- статор – неподвижная/статическая часть двигателя, которая вмещает в себе обмотки возбуждения на которые поступает питание;
- ротор – вращающаяся часть двигателя, которая отвечает за механические вращения.
Кроме вышеупомянутых основных деталей конструкции электродвигателя постоянного тока, существуют также и вспомогательные детали, такие как:
1 – хомут
2 – полюса
3 – обмотка возбуждения
4 – обмотка якоря
5 – коллектор
6 – щётки
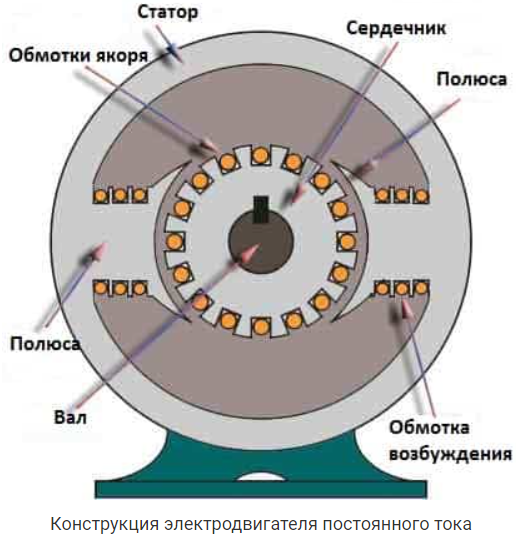
В совокупности все эти детали составляют цельную конструкцию электродвигателя постоянного тока.
2. Приводы постоянного тока
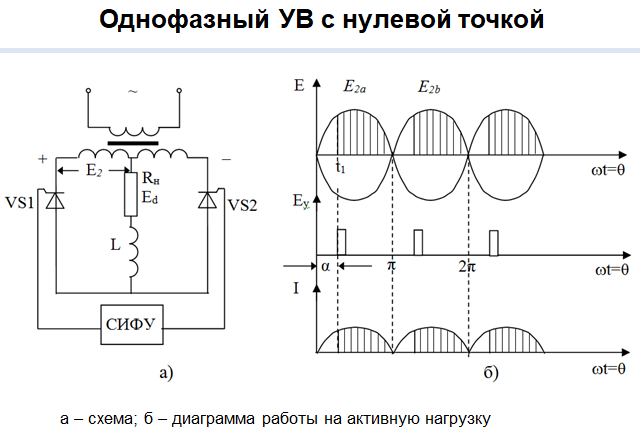
СОКРАЩЕНИЕ (УВ — Д) = система «управляемый выпрямитель — двигатель»
НВ = независимое возбуждение
Электродвигатели постоянного тока применяют в тех электроприводах, где требуется большой диапазон регулирования скорости, большая точность поддержания скорости вращения привода, регулирования скорости вверх от номинальной.
Для питания двигателей постоянного тока независимого возбуждения используют регулируемые источники постоянного тока:
- электромашинные агрегаты; генератор постоянного тока — двигатель переменного тока (система Г —Д);
- тиристорный преобразователь (управляемый выпрямитель) с системой импульсно-фазового управления (СИФУ) (система ТП—Д);
- полупроводниковые выпрямители с регулированием выпрямленного напряжения методом широтно-импульсного регулирования (ШИР-Д).
Систему Г—Д в настоящее время в стационарных установках не применяют. Эта система регулируемого электропривода продолжает использоваться в мобильных машинах (например, экскаваторах).
Система ШИР—Д находит ограниченное применение в качестве высокоточных электроприводов малой мощности (до 1,0...2,0 кВт).
https://www.elec.ru/files/2020/01/13/onischenko-gb-elektricheskiy-privod_a02621f49f1.pdf
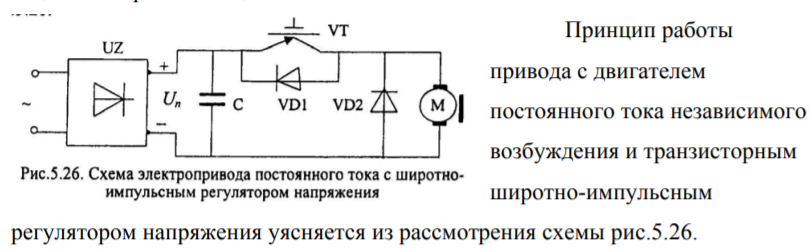
В этой схеме якорная цепь двигателя периодически подключается к источнику питания постоянного тока (неуправляемый выпрямитель UZ), имеющему постоянную величину напряжения Uп. Включение - отключение напряжения питания осуществляется ключом - транзистором VT. Частота коммутаций цепи постоянная, равная fк = 1|Tк.
Величина среднего напряжения Ucp, поступающего к якорю двигателя, определяется отношением времени включенного состояния ключа tвко времени периода коммутаций Тк=tв+ t0, как это показано на рис.5.27.
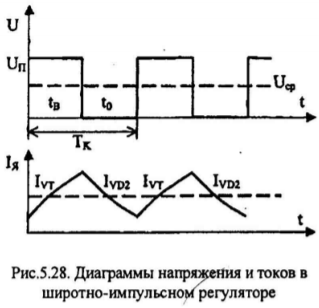
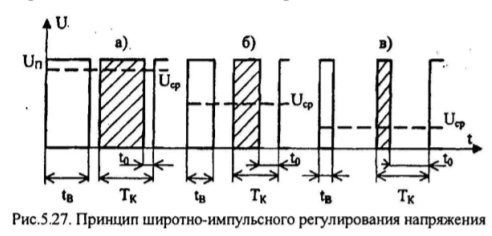 Если время включенного состояния велико и составляет порядка tв = 0,957Тк, то среднее напряжение, поступающее на двигатель, будет максимально и составлять Uмакс = 0,95Un. Если уменьшать время включенного состояния.ключа VT, то среднее значение напряжения будет уменьшаться (оно пропорционально заштрихованной площади на рис.5.27, деленной на время Тк). Из рис.5.27 следует, что среднее напряжение широтноимпульсного регулятора равно n к в n U Т t U = U = γ (5.30) Величину в Тк γ = t / называют скважностью импульсов. При размыкании ключа VT ток в якорной цепи двигателя прекратиться мгновенно не может, т.к. цепь якоря обладает значительной индуктивностью. Поэтому после отключения VT ток будет под действием э.д.с. самоиндукции обмотки якоря протекать через шунтирующий диод VD2. Переход тока якоря от транзистора VT к диоду VD2 иллюстрируется диаграммами, представленными на рис.5.28.
Если время включенного состояния велико и составляет порядка tв = 0,957Тк, то среднее напряжение, поступающее на двигатель, будет максимально и составлять Uмакс = 0,95Un. Если уменьшать время включенного состояния.ключа VT, то среднее значение напряжения будет уменьшаться (оно пропорционально заштрихованной площади на рис.5.27, деленной на время Тк). Из рис.5.27 следует, что среднее напряжение широтноимпульсного регулятора равно n к в n U Т t U = U = γ (5.30) Величину в Тк γ = t / называют скважностью импульсов. При размыкании ключа VT ток в якорной цепи двигателя прекратиться мгновенно не может, т.к. цепь якоря обладает значительной индуктивностью. Поэтому после отключения VT ток будет под действием э.д.с. самоиндукции обмотки якоря протекать через шунтирующий диод VD2. Переход тока якоря от транзистора VT к диоду VD2 иллюстрируется диаграммами, представленными на рис.5.28.
 Величина пульсаций тока зависит от частоты коммутаций fк - выше частота, меньше амплитуда пульсаций. В настоящее время широтноимпульсные регуляторы (ШИР) проектируются с частотой 2-10кГц и более. При высоких частотах амплитуды пульсаций тока будут незначительными и существенно меньше, чем при использовании тиристорных преобразователей с импульсно-фазовым управлением, питающихся от промышленной сети напряжением частотой 50Гц. Среднее напряжение, поступающее на якорную цепь двигателя, будет равно Ud = Un* γи, следовательно, механические характеристики электропривода в данной схеме будут описываться выражением (см.5.30)
Величина пульсаций тока зависит от частоты коммутаций fк - выше частота, меньше амплитуда пульсаций. В настоящее время широтноимпульсные регуляторы (ШИР) проектируются с частотой 2-10кГц и более. При высоких частотах амплитуды пульсаций тока будут незначительными и существенно меньше, чем при использовании тиристорных преобразователей с импульсно-фазовым управлением, питающихся от промышленной сети напряжением частотой 50Гц. Среднее напряжение, поступающее на якорную цепь двигателя, будет равно Ud = Un* γи, следовательно, механические характеристики электропривода в данной схеме будут описываться выражением (см.5.30) 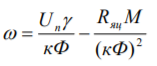 Заметим, что величина скважности у может изменяться от 0 до 0,95. Величина Un зависит от схемы выпрямления. При достаточно мощном фильтровом конденсаторе она приближается к амплитудному значению линейного напряжения переменного тока.
Заметим, что величина скважности у может изменяться от 0 до 0,95. Величина Un зависит от схемы выпрямления. При достаточно мощном фильтровом конденсаторе она приближается к амплитудному значению линейного напряжения переменного тока.
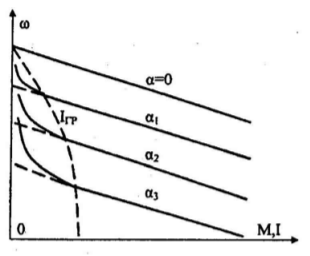
Механические характеристики нереверсивного привода постоянного тока независимого возбуждения с ШИР регулятором напряжения аналогичны характеристикам на рис.5.13, но зона прерывистых токов гораздо меньше.
Важным достоинством схем с широтно-импульсным регулированием напряжения является то, что на входе преобразователя устанавливается неуправляемый выпрямитель, вследствие чего его cosφ1, (по первой гармонике) близок к единице, а коэффициент мощности будет не ниже 0,95.
Основной системой регулируемого электропривода с двигателем постоянного тока является система ТП—Д. В этой системе для питания якорной цепи используют управляемые тиристорные выпрямители.
http://roboticslib.ru/books/item/f00/s00/z0000032/st005.shtml
наибольшее применение в приводах получили следующие схемы с тиристорным управлением:
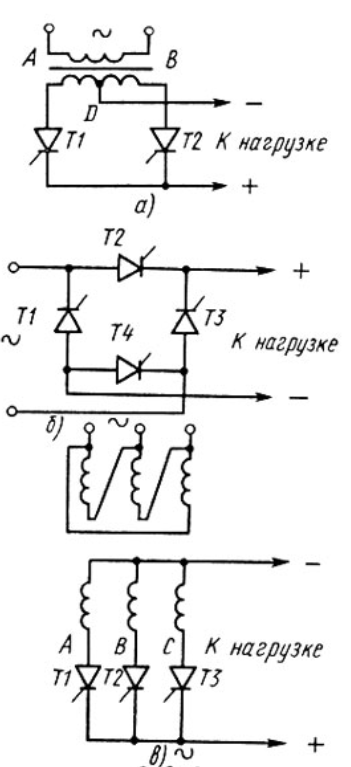
Схемы (а - д) однокомплектных тиристорных преобразователей: а - однофазный нулевой двухполупериодный, б - однофазный мостовой, в - трехфазный нулевой, г - трехфазный мостовой, д - шестифазный нулевой
Основу схем тиристорных преобразователей составляют полууправляемые силовые полупроводниковые приборы - тиристоры. Неполная управляемость тиристоров определяется тем, что включение тиристора контролируется системой управления (СИФУ) - при подаче отпирающего импульса на управляющий электрод тиристора он открывается и остается открытым после снятия отпирающего импульса. Закрывается тиристор после изменения полярности напряжения анод-катод и спадания тока до нуля.
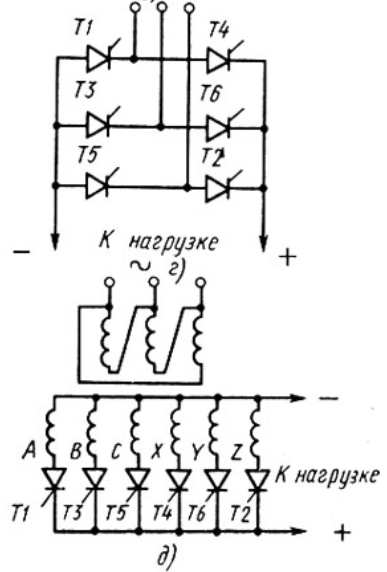
Тиристорный преобразователь в схемах электропривода постоянного тока выполняет две функции: выпрямление переменного напряжения питающей сети и регулирование средней величины выпрямленного напряжения.
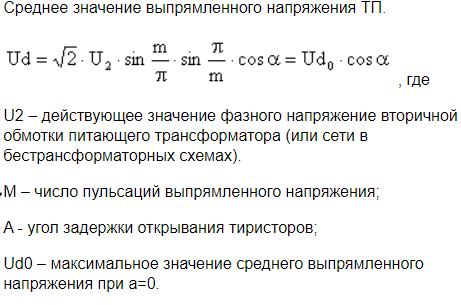
Характеристики УВ
достоинства системыТП-Д:
- Высокое быстродействие преобразователя, т.к. TП=0,01 с
- Более высокий КПД по сравнению с системой ГД
- Незначительная мощность управления
- Большой срок службы
- Малые габариты и вес преобразователя
- Простота осуществления резервирования и взаимозаменяемости блоков и узлов ТП
- При использовании нереверсивного преобразователя установленная мощность системы составляет ~ 2 Pдвиг, т.е. меньше, чем в системе ГД. При использовании реверсивного ТП она~ равна мощности в системе ГД
Недостатки сиcтемы ТП-Д:
- Уменьшение коэффициента мощности преобразователя при уменьшении скорости
- Значительное искажение кривой тока, потребляемого преобразователем из сети
- Неминуемые при регулировании угла aколебания реактивной мощности, особенно при большой мощности электропривода, приводящие к колебаниям напряжения в питающей сети
Пример работы:
3. Динамические характеристики ДПТ
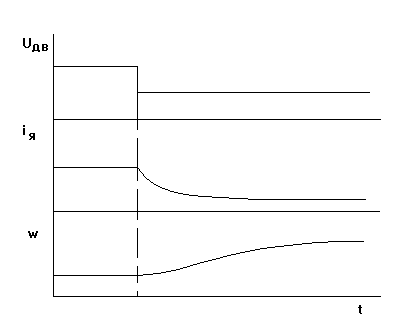
К динамическим характеристикам ДПТ НВ относятся временные характеристики изменения тока якоря Iя0 и угловой скорости ω0 под влиянием напряжения на якоре Iя и момента сопротивления на валу Мс. При этом наиболее часто динамические свойства ДПТ оцениваются переходной характеристикой.
Ниже представлены зависимости изменения скорости  при пуске двигателя без нагрузки. при пуске двигателя без нагрузки.
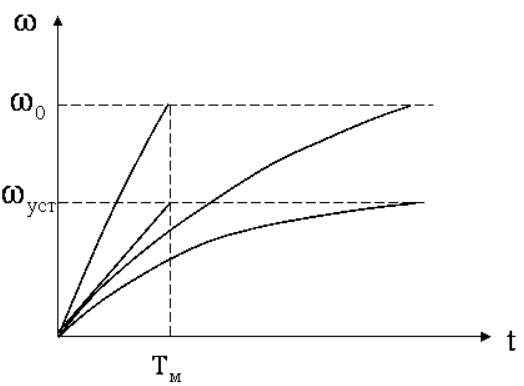
 - установившаяся угловая скорость при моменте нагрузки МС
Тм-электромеханической постоянной времени называется интервал времени, в течении которого привод, обладающий момент инерции J, разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода - установившаяся угловая скорость при моменте нагрузки МС
Тм-электромеханической постоянной времени называется интервал времени, в течении которого привод, обладающий момент инерции J, разгоняется без нагрузки из неподвижного состояния до угловой скорости идеального холостого хода  , при неизмененном моменте, равном моменту короткого замыкания. , при неизмененном моменте, равном моменту короткого замыкания.
| Ниже показаны зависимости тока якоря при пуске.
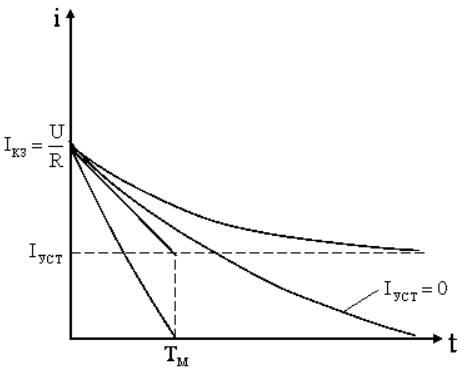
|
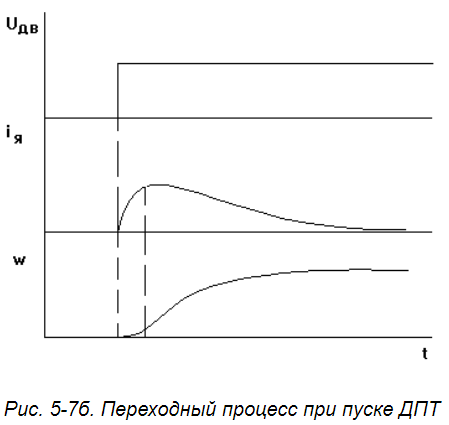
Динамика дпт при якорном управлении.
по передаточным функциям можно построить переходные процессы, например при пуске двигателя, как это показано на рис. 5-7б.
Динамика дпт при полюсном управлении
можно получить кривые переходного процесса в двигателе при ступенчатом изменении напряжения возбуждения, показанные на рис.5-8б.