
Заметим, что в однопрограммных системах не возникает необходимости введения понятия, обозначающего единицу работы, так как там не существует проблемы разделения ресурсов.








Создание потоков требует от ОС меньших накладных расходов, чем процессов. В отличие от процессов, которые принадлежат разным, вообще говоря, конкурирующим приложениям, все потоки одного процесса всегда принадлежат одному приложению, поэтому ОС изолирует потоки в гораздо меньшей степени, нежели процессы в традиционной мультипрограммной системе. Все потоки одного процесса используют общие файлы, таймеры, устройства, одну и ту же область оперативной памяти, одно и то же адресное пространство. Это означает, что они разделяют одни и те же глобальные переменные. Поскольку каждый поток может иметь доступ к любому виртуальному адресу процесса, один поток может использовать стек другого потока. Между потоками одного процесса нет полной защиты, потому что, во-первых, это невозможно, а во-вторых, не нужно. Чтобы организовать взаимодействие и обмен данными, потокам вовсе не требуется обращаться к ОС, им достаточно использовать общую память — один поток записывает данные, а другой читает их. С другой стороны, потоки разных процессов по-прежнему хорошо защищены друг от друга.
Итак, мультипрограммирование более эффективно на уровне потоков, а не процессов. Каждый поток имеет собственный счетчик команд и стек. Задача, оформленная в виде нескольких потоков в рамках одного процесса, может быть выполнена быстрее за счет псевдопараллельного (или параллельного в мультипроцессорной системе) выполнения ее отдельных частей. Например, если электронная таблица была разработана с учетом возможностей многопоточной обработки, то пользователь может запросить пересчет своего рабочего листа и одновременно продолжать заполнять таблицу. Особенно эффективно можно использовать многопоточность для выполнения распределенных приложений, например многопоточный сервер может параллельно выполнять запросы сразу нескольких клиентов.
Использование потоков связано не только со стремлением повысить производительность системы за счет параллельных вычислений, но и с целью создания более читабельных, логичных программ. Введение нескольких потоков выполнения упрощает программирование. Например, в задачах типа «писатель-читатель» один поток выполняет запись в буфер, а другой считывает записи из него. Поскольку они разделяют общий буфер, не стоит их делать отдельными процессами. Другой пример использования потоков — управление сигналами, такими как прерывание с клавиатуры (del или break). Вместо обработки сигнала прерывания один поток назначается для постоянного ожидания поступления сигналов. Таким образом, использование потоков может сократить необходимость в прерываниях пользовательского уровня. В этих примерах не столь важно параллельное выполнение, сколь важна ясность программы.
Наибольший эффект от введения многопоточной обработки достигается в мультипроцессорных системах, в которых потоки, в том числе и принадлежащие одному процессу, могут выполняться на разных процессорах действительно параллельно (а не псевдопараллельно).
7. Кооперативная (невытесняющая) и вытесняющая многозадачность. Достоинства и недостатки.
С самых общих позиций все множество алгоритмов планирования можно разделить на два класса: вытесняющие и невытесняющие алгоритмы планирования.
§ Невытесняющие (non-preemptive) алгоритмы основаны на том, что активному потоку позволяется выполняться, пока он сам, по собственной инициативе, не отдаст управление операционной системе для того, чтобы та выбрала из очереди другой готовый к выполнению поток.
§ Вытесняющие (preemptive) алгоритмы — это такие способы планирования потоков, в которых решение о переключении процессора с выполнения одного потока на выполнение другого потока принимается операционной системой, а не активной задачей.
Основным различием между вытесняющими и невытесняющими алгоритмами является степень централизации механизма планирования потоков. При вытесняющем мультипрограммировании функции планирования потоков целиком сосредоточены в операционной системе и программист пишет свое приложение, не заботясь о том, что оно будет выполняться одновременно с другими задачами. При этом операционная система выполняет следующие функции: определяет момент снятия с выполнения активного потока, запоминает его контекст, выбирает из очереди готовых потоков следующий, запускает новый поток на выполнение, загружая его контекст.
При невытесняющем мультипрограммировании механизм планирования распределен между операционной системой и прикладными программами. Прикладная программа, получив управление от операционной системы, сама определяет момент завершения очередного цикла своего выполнения и только затем передает управление ОС с помощью какого-либо системного вызова. ОС формирует очереди потоков и выбирает в соответствии с некоторым правилом (например, с учетом приоритетов) следующий поток на выполнение. Такой механизм создает проблемы как для пользователей, так и для разработчиков приложений.
Для пользователей это означает, что управление системой теряется на произвольный период времени, который определяется приложением (а не пользователем). Если приложение тратит слишком много времени на выполнение какой-либо работы, например на форматирование диска, пользователь не может переключиться с этой задачи На другую задачу, например на текстовый редактор, в то время как форматирование продолжалось бы в фоновом режиме.
Поэтому разработчики приложений для операционной среды с невытесняющей многозадачностью вынуждены, возлагая на себя часть функций планировщика, создавать приложения так, чтобы они выполняли свои задачи небольшими частями. Например, программа форматирования может отформатировать одну дорожку дискеты и вернуть управление системе. После выполнения других задач система возвратит управление программе форматирования, чтобы та отформатировала следующую дорожку. Подобный метод разделения времени между задачами работает, но он существенно затрудняет разработку программ и предъявляет повышенные требования к квалификации программиста. Программист должен обеспечить «дружественное» отношение своей программы к другим выполняемым одновременно с ней программам. Для этого в программе должны быть предусмотрены частые передачи управления операционной системе. Крайним проявлением «не дружественности» приложения является его зависание, которое приводит к общему краху системы. В системах с вытесняющей многозадачностью такие ситуации, как правило, исключены, так как центральный планирующий механизм имеет возможность снять зависшую задачу с выполнения.
Однако распределение функций планирования потоков между системой и приложениями не всегда является недостатком, а при определенных условиях может быть и преимуществом, потому что дает возможность разработчику приложений самому проектировать алгоритм планирования, наиболее подходящий для данного фиксированного набора задач. Так как разработчик сам определяет в программе момент возвращения управления, то при этом исключаются нерациональные прерывания программ в «неудобные» для них моменты времени. Кроме того, легко разрешаются проблемы совместного использования данных: задача во время каждого цикла выполнения использует их монопольно и уверена, что на протяжении этого периода никто другой не изменит данные. Существенным преимуществом невытесняющего планирования является более высокая скорость переключения с потока на поток.
ПРИМЕЧАНИЕ
Понятия вытесняющих и невытесняющих алгоритмов планирования иногда отождествляют с понятиями приоритетных и бесприоритетных дисциплин, что, возможно, связано со звучанием соответствующих англоязычных терминов «preemptive» и «non-preemptive». Однако это совершенно неверно, так как приоритеты в том и другом случаях могут как использоваться, так и не использоваться.
Почти во всех современных операционных системах, ориентированных на высокопроизводительное выполнение приложений (UNIX, Windows NT/2000, OS/2, VAX/VMS), реализованы вытесняющие алгоритмы планирования потоков (процессов). В последнее время дошла очередь и до ОС класса настольных систем, например OS/2 Warp и Windows 95/98.
Примером эффективного использования невытесняющего планирования являются файл-серверы NetWare 3.x и 4.x, в которых в значительной степени благодаря такому планированию достигнута высокая скорость выполнения файловых операций. В соответствии с концепцией невытесняющего планирования, чтобы не занимать процессор слишком долго, поток в NetWare сам отдает управление планировщику ОС, используя следующие системные вызовы:
§ ThreadSwitch — поток, вызвавший эту функцию, считает себя готовым к немедленному выполнению, но отдает управление для того, чтобы могли выполняться и другие потоки;
§ ThreadSwitchWithDelay — функция аналогична предыдущей, но поток считает, что будет готов к выполнению только через определенное количество переключений с потока на поток;
§ Delay — функция аналогична предыдущей, но задержка дается в миллисекундах;
§ ThreadSwitchLowPriority — функция отдачи управления, отличается от Thread-Switch тем, что поток просит поместить его в очередь готовых к выполнению, но низкоприоритетных потоков.
Планировщик NetWare использует несколько очередей готовых потоков (рис. 4.5). Только что созданный поток попадает в конец очереди RunHst, которая содержит готовые к выполнению потоки. После отказа от процессора поток попадает в ту или иную очередь в зависимости от того, какой из системных вызовов был использован при передаче управления. Поток поступает в конец очереди RunHst при вызове ThreadSwitch, в конец очереди DelayedWorkToDoHst при вызовах ThreadSwitchWithDelay или Del ay или же в конец очереди LowPrlorityRunList при вызове ThreadSwl tchLowPrlority.
После того как выполнявшийся процессором поток завершит свой очередной цикл выполнения, отдав управление с помощью одного из вызовов передачи управления (или вызова ожидания на семафоре), планировщик выбирает для выполнения стоящий первым в очереди RunList поток и запускает его. Потоки, находящиеся в очереди DelayedWorkToDoList, после завершения условия ожидания перемещаются в конец очереди RunList.
Потоки, находящиеся в очереди LowPriorltyRunList, запускаются на выполнение только в том случае, если очередь RunHst пуста. Обычно в эту очередь назначаются потоки, выполняющие несрочную фоновую работу.
Очередь WorkToDoList является в системе самой приоритетной. В эту очередь попадают так называемые рабочие потоки. В NetWare, как и в некоторых других ОС, вместо создания нового потока для выполнения определенной работы может быть использован уже существующий системный поток. Пул рабочих потоков создается при старте системы для системных целей и выполнения срочных работ. Рабочие потоки ОС обладают наивысшим приоритетом, то есть попадают на выполнение перед потоками из очереди RunList. Планировщик разрешает выполниться подряд только определенному количеству потоков из очереди Work -ToDoList, а затем запускает поток из очереди RunList.
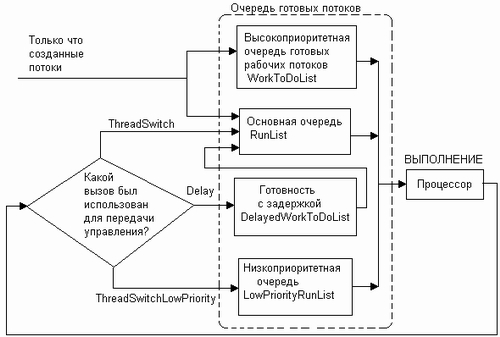
Рис. 4.5. Схема планирования потоков в NetWare
Описанный невытесняющий механизм организации многопоточной работы в ОС NetWare v3.x и NetWare 4.x потенциально очень производителен, так как отличается небольшими накладными расходами ОС на диспетчеризацию потоков за счет простых алгоритмов планирования и иерархии контекстов. Но для достижения высокой производительности к разработчикам приложений для ОС NetWare предъявляются высокие требования, так как распределение процессорного времени между различными приложениями зависит в конечном счете от искусства программиста.
8. Основные алгоритмы планирования задач: алгоритмы, основанные на квантовании, смешанные алгоритмы. Размер кванта.
В основе многих вытесняющих алгоритмов планирования лежит концепция квантования. В соответствии с этой концепцией каждому потоку поочередно для выполнения предоставляется ограниченный непрерывный период процессорного времени — квант. Смена активного потока происходит, если:
§ поток завершился и покинул систему;
§ произошла ошибка;
§ поток перешел в состояние ожидания;
§ исчерпан квант процессорного времени, отведенный данному потоку.
Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый поток из очереди готовых. Граф состояний потока, изображенный на рис. 4.6, соответствует алгоритму планирования, основанному на квантовании.
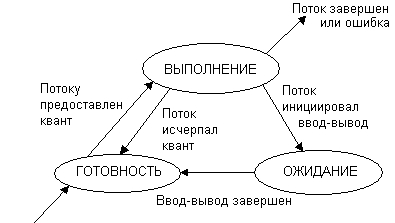
Рис. 4.6. Граф состояний потока в системе с квантованием
Кванты, выделяемые потокам, могут быть одинаковыми для всех потоков или различными. Рассмотрим, например, случай, когда всем потокам предоставляются кванты одинаковой длины q (рис. 4.7). Если в системе имеется п потоков, то время, которое поток проводит в ожидании следующего кванта, можно грубо оценить как q(n-l). Чем больше потоков в системе, тем больше время ожидания, тем меньше возможности вести одновременную интерактивную работу нескольким пользователям. Но если величина кванта выбрана очень небольшой, то значение произведения q(n-l) все равно будет достаточно мало для того, чтобы пользователь не ощущал дискомфорта от присутствия в системе других пользователей. Типичное значение кванта в системах разделения времени составляет десятки миллисекунд.
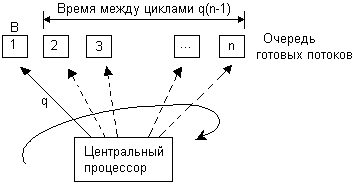
Рис. 4.7. Иллюстрация расчета времени ожидания в очереди
Если квант короткий, то суммарное время, которое проводит поток в ожидании процессора, прямо пропорционально времени, требуемому для его выполнения (то есть времени, которое потребовалось бы для выполнения этого потока при монопольном использовании вычислительной системы). Действительно, поскольку время ожидания между двумя циклами выполнения равно q(n-l), а количество циклов B/q, где В — требуемое время выполнения, то W*B(n-l). Заметим, что эти соотношения представляют собой весьма грубые оценки, основанные на предположении, что В значительно превышает q. При этом не учитывается, что потоки могут использовать кванты не полностью, что часть времени они могут тратить на ввод-вывод, что количество потоков в системе может динамически меняться и т. д.
Чем больше квант, тем выше вероятность того, что потоки завершатся в результате первого же цикла выполнения, и тем менее явной становится зависимость времени ожидания потоков от их времени выполнения. При достаточно большом кванте алгоритм квантования вырождается в алгоритм последовательной обработки, присущий однопрограммным системам, при котором время ожидания задачи в очереди вообще никак не зависит от ее длительности.
Кванты, выделяемые одному потоку, могут быть фиксированной величины, а могут и изменяться в разные периоды жизни потока. Пусть, например, первоначально каждому потоку назначается достаточно большой квант, а величина каждого следующего кванта уменьшается до некоторой заранее заданной величины. В таком случае преимущество получают короткие задачи, которые успевают выполняться в течение первого кванта, а длительные вычисления будут проводиться в фоновом режиме. Можно представить себе алгоритм планирования, в котором каждый следующий квант, выделяемый определенному потоку, больше предыдущего. Такой подход позволяет уменьшить накладные расходы на переключение задач в том случае, когда сразу несколько задач выполняют длительные вычисления.
Потоки получают для выполнения квант времени, но некоторые из них используют его не полностью, например из-за необходимости выполнить ввод или вывод данных. В результате возникает ситуация, когда потоки с интенсивными обращениями к вводу-выводу используют только небольшую часть выделенного им процессорного времени. Алгоритм планирования может исправить эту «несправедливость». В качестве компенсации за неиспользованные полностью кванты потоки получают привилегии при последующем обслуживании. Для этого планировщик создает две очереди готовых потоков (рис. 4.8). Очередь 1 образована потоками, которые пришли в состояние готовности в результате исчерпания кванта времени, а очередь 2 — потоками, у которых завершилась операция ввода-вывода. При выборе потока для выполнения прежде всего просматривается вторая очередь, и только если она пуста, квант выделяется потоку из первой очереди.
Многозадачные ОС теряют некоторое количество процессорного времени для выполнения вспомогательных работ во время переключения контекстов задач. При этом запоминаются и восстанавливаются регистры, флаги и указатели стека, а также проверяется статус задач для передачи управления. Затраты на эти вспомогательные действия не зависят от величины кванта времени, поэтому чем больше квант, тем меньше суммарные накладные расходы, связанные с переключением потоков.
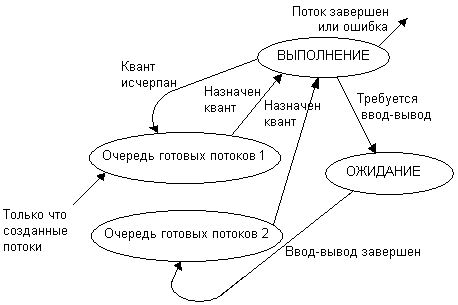
Рис. 4.8. Квантование с предпочтением потоков, интенсивно обращающихся к вводу-выводу
ПРИМЕЧАНИЕ
В алгоритмах, основанных на квантовании, какую бы цель они не преследовали (предпочтение коротких или длинных задач, компенсация недоиспользованного кванта или минимизация накладных расходов, связанных с переключениями), не используется никакой предварительной информации о задачах. При поступлении задачи на обработку ОС не имеет никаких сведений о том, является ли она короткой или длинной, насколько интенсивными будут ее запросы к устройствам ввода-вывода, насколько важно ее быстрое выполнение и т. д. Дифференциация обслуживания при квантовании базируется на «истории существования» потока в системе.
9. Основные алгоритмы планирования задач: алгоритмы, основанные на приоритетах. Приоритеты задач: статические (фиксированные) и динамические. Обслуживание с относительными и абсолютными приоритетами.
Другой важной концепцией, лежащей в основе многих вытесняющих алгоритмов планирования, является приоритетное обслуживание. Приоритетное обслуживание предполагает наличие у потоков некоторой изначально известной характеристики — приоритета, на основании которой определяется порядок их выполнения. Приоритет — это число, характеризующее степень привилегированности потока при использовании ресурсов вычислительной машины, в частности процессорного времени: чем выше приоритет, тем выше привилегии, тем меньше времени будет проводить поток в очередях.
Приоритет может выражаться целым или дробным, положительным или отрицательным значением. В некоторых ОС принято, что приоритет потока тем выше, чем больше (в арифметическом смысле) число, обозначающее приоритет. В других системах, наоборот, чем меньше число, тем выше приоритет.
В большинстве операционных систем, поддерживающих потоки, приоритет потока непосредственно связан с приоритетом процесса, в рамках которого выполняется данный поток. Приоритет процесса назначается операционной системой при его создании. Значение приоритета включается в описатель процесса и используется при назначении приоритета потокам этого процесса. При назначении приоритета вновь созданному процессу ОС учитывает, является этот процесс системным или прикладным, каков статус пользователя, запустившего процесс, было ли явное указание пользователя на присвоение процессу определенного уровня приоритета. Поток может быть инициирован не только по команде пользователя, но и в результате выполнения системного вызова другим потоком. В этом случае при назначении приоритета новому потоку ОС должна принимать во внимание значение параметров системного вызова.
Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока. Изменение приоритета могут происходить по инициативе самого потока, когда он обращается с соответствующим вызовом к операционной системе, или по инициативе пользователя, когда он выполняет соответствующую команду. Кроме того, ОС сама может изменять приоритеты потоков в зависимости от ситуации, складывающейся в системе. В последнем случае приоритеты называются динамическими в отличие от неизменяемых, фиксированных, приоритетов.
От того, какие приоритеты назначены потокам, существенно зависит эффективность работы всей вычислительной системы. В современных ОС во избежание разбалансировки системы, которая может возникнуть при неправильном назначении приоритетов, возможности пользователей влиять на приоритеты процессов и потоков стараются ограничивать. При этом обычные пользователи, как правило, не имеют права повышать приоритеты своим потокам, это разрешено делать (да и то в определенных пределах) только администраторам. В большинстве же случаев ОС присваивает приоритеты потокам по умолчанию.
В качестве примера рассмотрим схему назначения приоритетов потокам, принятую в операционной системе Windows NT (рис. 4.9). В системе определено 32 уровня приоритетов и два класса потоков — потоки реального времени и потоки с переменными приоритетами. Диапазон от 1 до 15 включительно отведен для потоков с переменными приоритетами, а от 16 до 31 — для более критичных ко времени потоков реального времени (приоритет 0 зарезервирован для системных целей).
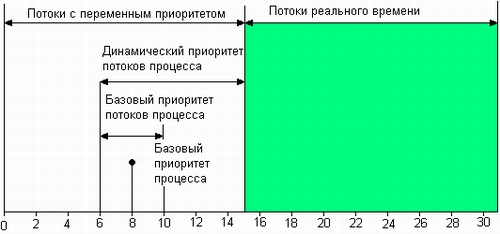
Рис. 4.9. Схема назначения приоритетов в Windows NT
При создании процесса он в зависимости от класса получает по умолчанию базовый приоритет в верхней5 или нижней части диапазона. Базовый приоритет процесса в дальнейшем может быть повышен или понижен операционной системой. Первоначально Поток получает значение базового приоритета из диапазона базового приоритета процесса, в котором он был создан. Пусть, например, значение базового приоритета некоторого процесса равно К. Тогда все потоки данного процесса получат базовые приоритеты из диапазона [К-2, К+2]. Отсюда видно, что, изменяя базовый приоритет процесса, ОС может влиять на базовые приоритеты его потоков.
В Windows NT с течением времени приоритет потока, относящегося к классу потоков с переменными приоритетами, может отклоняться от базового приоритета потока, причем эти изменения могут быть не связаны с изменениями базового приоритета процесса. ОС может повышать приоритет потока (который в этом случае называется динамическим) в тех случаях, когда поток не полностью использовал отведенный ему квант, или понижать приоритет, если квант был использован полностью. ОС наращивает приоритет дифференцирование в зависимости от того, какого типа событие не дало потоку полностью использовать квант. В частности, ОС повышает приоритет в большей степени потокам, которые ожидают ввода с клавиатуры (интерактивным приложениям) и в меньшей степени — потокам, выполняющим дисковые операции. Именно на основе динамических приоритетов осуществляется планирование потоков. Начальной точкой отсчета для динамического приоритета является значение базового приоритета потока. Значение динамического приоритета потока ограничено снизу его базовым приоритетом, верхней же границей является нижняя граница диапазона приоритетов реального времени.
Существуют две разновидности приоритетного планирования: обслуживание с относительными приоритетами и обслуживание с абсолютными приоритетами.
В обоих случаях выбор потока на выполнение из очереди готовых осуществляется одинаково: выбирается поток, имеющий наивысший приоритет. Однако проблема определения момента смены активного потока решается по-разному. В системах с относительными приоритетами активный поток выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ожидания (или же произойдет ошибка, или поток завершится). На рис. 4.10, а показан граф состояний потока в системе с относительными приоритетами.
В системах с абсолютными приоритетами выполнение активного потока прерывается кроме указанных выше причин, еще при одном условии: если в очереди готовых потоков появился поток, приоритет которого выше приоритета активного потока. В этом случае прерванный поток переходит в состояние готовности (рис. 4.10, б).
В системах, в которых планирование осуществляется на основе относительных приоритетов, минимизируются затраты на переключения процессора с одной работы на другую. С другой стороны, здесь могут возникать ситуации, когда одна задача занимает процессор долгое время. Ясно, что для систем разделения времени и реального времени такая дисциплина обслуживания не подходит: интерактивное приложение может ждать своей очереди часами, пока вычислительной задаче не потребуется ввод-вывод. А вот в системах пакетной обработки (в том числе известной ОС OS/360) относительные приоритеты используются широко.
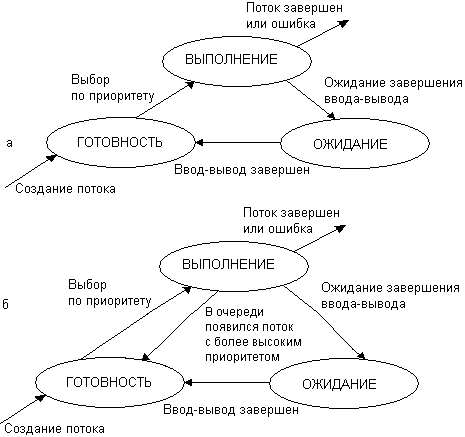
Рис. 4.10. Графы состояний потоков в системах с относительными и абсолютными приоритетами
В системах с абсолютными приоритетами время ожидания потока в очередях может быть сведено к минимуму, если ему назначить самый высокий приоритет. Такой поток будет вытеснять из процессора все остальные потоки (кроме потоков, имеющих такой же наивысший приоритет). Это делает планирование на основе абсолютных приоритетов подходящим для систем управления объектами, в которых важна быстрая реакция на событие.
10. Обеспечение корректности совместного доступа к объектам. Предотвращение тупиковых ситуаций.
Обеспечение корректности совместного доступа к объектам
В процессе функционирования многозадачной ОС часто возникает ситуация, когда две или более задач одновременно обращается к одному и тому же объекту ОС. Если при этом режим доступа хотя бы одной задачи допускает изменение данных объекта, не исключено, что обращения других задач к данному объекту будет выполнены некорректно. Например, две пишут враз, одна пишет - другая читает.
В данном случае, если какая-то задача изменяет данные, то доступ к этим данным должен быть запрещен другим задачам. Единственное исключение – все задачи, изменяющие один и тот же объект открывают его в режиме, допускающем совместное изменение данных. Открывая объект таким образом, задача тем самым заявляет ОС, что она полностью берет на себя ответственность за все действия, связанные с обеспечением корректности совместного доступа к данным.
Предотвращение тупиковых ситуаций
Тупиковая ситуация может возникнуть тогда, когда несколько программ одновременно пытаются открыть несколько одних и тех же объектов в режиме монопольного доступа. Если одна программа открыла одну часть объектов, а другая – другую, то ни одна из программ сможет открыть остальные объекты до тех пор, пока другая программа их не закроет. Если функции закрытия объектов не предусмотрены ни в одной из программ, ситуация становится тупиковой – каждая программа ждет, пока другая закроет открытые ею объекты.
Один из методов борьбы с тупиковыми ситуациями состоит в следующем: если программа для выполнения некоторой операции должна открыть в монопольном режиме несколько объектов ОС, но не смогла этого сделать, так как некоторые из этих объектов уже открыты в монопольном режиме другой программой, то она должна закрыть все уже открытые объекты, подождать некоторое время и повторить операцию сначала. Наилучшие результаты – если время ожидания случайно.
11. Синхронизация параллельных задач. Обеспечение корректности совместного доступа к объектам ОС.
В NT одновременный доступ нескольких процессов к одному объекту разрешается только в том случае, когда все процессы открывают объект для чтения.
Исключение составляют только объекты типа файл, которые можно открывать в режиме совместной записи. В режиме совместной записи файл должны открывать все процессы. Каждый процесс при записи/чтении должен заблокировать соответствующий участок файла.
Для обеспечения корректности совместного доступа к данным, не являющимся объектами ОС, в NT применяются мьютексы, критические секции и семафоры.
Мьютексы
Мьютекс представляет собой объект файловой системы, который может быть либо свободным, либо принадлежать одному из потоков ОС. Два потока не могут одновременно владеть одним и тем же мьютексом. NT поддерживает функции, которые позволяют создать мьютекс либо освободить его. Каждый поток, перед тем, как обратиться к совместно используемым данным, пытается завладеть мьютексом. Если мьютекс в настоящее время занят, поток ждет его освобождения. Если несколько запросов на захват - то в порядке очереди вне зависимости от приоритета. Мьютекссы могут эффективно использоваться для организации совместного доступа к оперативной памяти, разделяемым между несколькими процессами.
12. Моменты перепланировки. Механизм прерывания. Основные виды прерываний. Обработка прерываний. Векторы прерываний.
Моменты перепланировки
Для реализации алгоритма планирования ОС должна получать управление всякий раз, когда в системе происходит событие, требующее перераспределения процессорного времени. К таким событиям могут быть отнесены следующие:
§ Прерывание от таймера, сигнализирующее, что время, отведенное активной задаче на выполнение, закончилось. Планировщик переводит задачу в состояние готовности и выполняет перепланирование.
§ Активная задача выполнила системный вызов, связанный с запросом на ввод-вывод или на доступ к ресурсу, который в настоящий момент занят (например, файл данных). Планировщик переводит задачу в состояние ожидания и выполняет перепланирование.
§ Активная задача выполнила системный вызов, связанный с освобождением ресурса. Планировщик проверяет, не ожидает ли этот ресурс какая-либо задача. Если да, то эта задача переводится из состояния ожидания в состояние готовности. При этом, возможно, что задача, которая получила ресурс, имеет более высокий приоритет, чем текущая активная задача. После перепланирования более приоритетная задача получает доступ к процессору, вытесняя текущую задачу.
§ Внешнее (аппаратное) прерывание1, которое сигнализирует о завершении периферийным устройством операции ввода-вывода, переводит соответствующую задачу в очередь готовых, и выполняется планирование.
§ Внутреннее прерывание сигнализирует об ошибке, которая произошла в результате выполнения активной задачи. Планировщик снимает задачу и выполняет перепланирование.
При возникновении каждого из этих событий планировщик выполняет просмотр очередей и решает вопрос о том, какая задача будет выполняться следующей. Помимо указанных существует и ряд других событий (часто связанных с системными вызовами), требующих перепланировки. Например, запросы приложений и пользователей на создание новой задачи или повышение приоритета уже существующей задачи создают новую ситуацию, которая требует пересмотра очередей и, возможно, переключения процессора.
На рис. 4.11 показан фрагмент временной диаграммы работы планировщика в системе, где одновременно выполняются четыре потока. В данном случае неважно, по какому правилу выбираются потоки на выполнение и каким образом изменяются их приоритеты. Существенное значение имеют лишь события, вызывающие активизацию планировщика.
Первые четыре цикла работы планировщика, приведенные на рисунке, были инициированы прерываниями от таймера по истечении квантов времени (эти события обозначены на рисунке как Т).
Следующая передача управления планировщику была осуществлена в результате выполнения потоком 3 системного запроса на ввод-вывод (событие I/O). Планировщик перевел этот поток в состояние ожидания, а затем переключил процессор на поток 2. Поток 2 полностью использовал свой квант, произошло прерывание от таймера, и планировщик активизировал поток 1.
При выполнении потока 1 произошло событие R — системный вызов, в результате которого освободился некоторый ресурс (например, был закрыт файл). Это событие вызвало перепланировку потоков. Планировщик просмотрел очередь ожидающих потоков и обнаружил, что поток 4 ждет освобождения данного ресурса. Этот поток был переведен в состояние готовности, но поскольку приоритет выполняющегося в данный момент потока 1 выше приоритета потока 4, планировщик вернул процессор потоку 1.
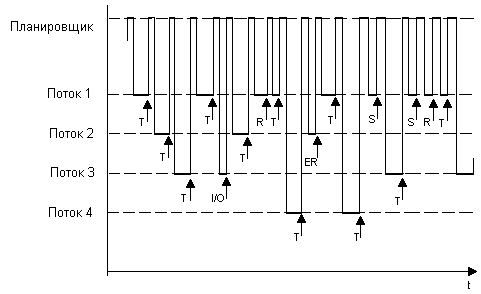
Рис. 4.11. Моменты перепланировки потоков
В следующем цикле работы планировщик активизировал поток 4, а затем, после истечения кванта и сигнала от таймера, управление получил поток 2. Этот поток не успел использовать свой квант, так как был снят с выполнения в результате возникшей ошибки (событие ER).
Далее планировщик предоставлял процессорное время потокам 1, 4 и снова 1. Во время выполнения потока 1 произошло прерывание S от внешнего устройства, сигнализирующее о том, что операция передачи данных завершена. Это событие активизировало работу планировщика, в результате которой поток 3, ожидавший завершения ввода-вывода, вытеснил поток 1, так как имел в этот момент более высокий приоритет.
Последний показанный на диаграмме период выполнения потока 1 прерывался несколько раз. Вначале это было прерывание от внешнего устройства (S), затем программное прерывание (R), вызвавшее освобождение ресурса, и, наконец, прерывание от таймера (Т). Каждое из этих трех прерываний вызвало перепланировку потоков. В двух первых случаях планировщик оставил выполняться поток 1, так как в очереди не оказалось более приоритетных потоков, а квант времени, выделенный потоку 1, еще не был исчерпан. Переключение потоков было выполнено только по прерыванию от таймера.
В системах реального времени для отработки статического расписания планировщик активизируется по прерываниям от таймера. Эти прерывания пронизывают всю временную ось, возникая через короткие постоянные интервалы времени. После каждого прерывания планировщик просматривает расписание и проверяет, не пора ли переключить задачи. Кроме прерываний от таймера в системах реального времени перепланирование задач может происходить по прерываниям от внешних устройств — различного вида датчиков и исполнительных механизмов.