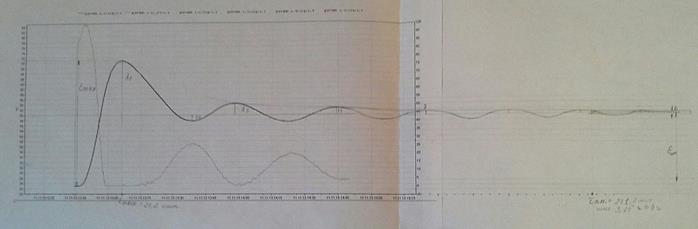
Расчёт критериев качества регулирования по переходной характеристике CP в динамическом режиме.








1) Критерии, характеризующие точность системы регулирования:
1.1 ԑmax= 71 – 23.5 = 47.5 °C – максимальная погрешность.
1.2 ԑ∞= 50 – 23.5 = 26.5 °C – статическая погрешность.
2) Критерии быстродействия системы регулирования:
2.1 τп.п. = 231.2 мин = 3.85 ч - время переходного процесса
2.2 τmax = 21.2 мин - время достижения 1-го максимума.
3) Критерии колебательности переходного процесса :
3.1 ψ= ((А1 – А3)/A1)*100% = ((21 – 4)/21)*100% = 80.6% - степень затухания колебаний.
ψ›0 – колебания затухают, система устойчива
3.2 σ=(A2/A1)*100% = (25/21)*100% = 11.9% - переригулирование
σ=(( ԑmax - ԑ∞)/ ԑ∞)*100% = ((47.5 – 26.5)/26.5)* 100% = 79.2%
3.3 δ = lg(A1/A3) = lg(21/4) = 0.72 – логарифмический декремент затухания
В данном процессе время регулирования очень велико, также наблюдается значительное перерегулирование.
Влияние параметров настроек регулятора на показатели качества регулирования.
1) Данный переходный процесс практически равносилен типовому оптимальному процессу, где τп.п. и σ велики и обеспечивается наименьшая ԑmax. В этом случае, чтобы уменьшить ԑmax, нужно уменьшить интегральную составляющую – коэффициент Кi.
2) Но τп.п. достаточно велико, чтобы увеличить быстродействие процесса (уменьшить τп.п.), нужно увеличить Kp и Kd , но до допустимых значений, чтобы система осталась устойчивой.
Выводы:
Параметры ПИД-регулятора следует скорректировать, т.к. данная настройка не обеспечивает приемлемое качество регулирования. Можно использовать метод незатухающих колебаний для оптимальной настройки регулятора: для ПИД Kp = 0.6* Kp max
Tu = T кр /2
T п = T кр /8,
но для этого следует провести ряд опытов, чтобы подобрать Kp max и определить T кр.
В статическом режиме.
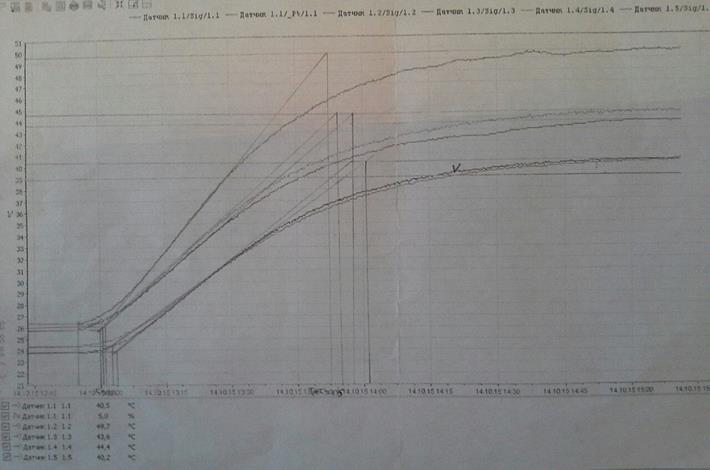
В динамическом режиме.