
Проверка верхней фанерной обшивки на устойчивость








При работе плиты на общий изгиб, фанерный лист верхней обшивки находится под воздействием сжимающих нормальных напряжений и должен быть проверен на устойчивость по формуле:
 ‒ момент сопротивления для верхней сжатой зоны приведенного поперечного сечения;
‒ момент сопротивления для верхней сжатой зоны приведенного поперечного сечения;
 ‒ расчетное сопротивление фанеры сжатию вдоль волокон наружного шпона;
‒ расчетное сопротивление фанеры сжатию вдоль волокон наружного шпона;
 ‒ коэффициент продольного изгиба для листовой фанеры;
‒ коэффициент продольного изгиба для листовой фанеры;

σ =  =12 Мпа
=12 Мпа
Условие устойчивости удовлетворяется.
Проверка прочности клеевых швов между шпонами фанеры на скалывание
Клеевые швы проверяются на скалывание между шпонами фанеры, ближайшими к продольным ребрам, в опорном сечении плиты в месте максимальной по величине поперечной силы.
Условие прочности на скалывание:
‒расчетное сопротивление фанеры скалыванию;
 – суммарная ширина м продольных ребер;
– суммарная ширина м продольных ребер;
Условие удовлетворяется.
Проверка жесткости настила
Расчет относится ко второй группе предельных состояний и производится на нормативные значения нагрузок. Расчет заключается в определении расчетной величины относительного прогиба и сравнении ее с предельно допустимой, рекомендованной нормами.
Условие жесткости в относительных прогибах:
 =
= 
=·  =
=  = 0,009 м
= 0,009 м



Условия жесткости удовлетворяется.
4. ВЫБОР И ОБОСНОВАНИЕ ВЫБОРА СХЕМЫ УПРАВЛЕНИЯ МЕХАНИЗМОМ
Функциональные возможности сцены напрямую влияют на их качество и реализацию. Любая современная театральная площадка должна быть максимально современной, многофункциональной и с возможностью трансформации в различных плоскостях.
Современные постановки весьма сложны, что зачастую требует от механизма сцены возможности быстрой смены декораций или же полной трансформации за считанные минуты. Поэтому в театре все больше уделяют внимание модернизации управлению механизмами, так как компьютерное управление во многом облегчает задачи и даёт возможность выполнению сложных механических действий. Благодаря компьютерному управлению есть возможность.
• Ручного и полуавтоматического управления.
• Автоматического управления механизма системы по заранее сохранённому сценарию с возможностью оперативного регулирования его выполнения.
• Управления по положению, скорости, времени каждого механизма и/или группам механизма.
• Точного позиционирования каждого механизма.
• Точная регулировка скорости без потери момента во всём диапазоне регулирования от 0 до 100%.
• Возможность реализовывать «сложные движения»: работа механизмов по сложным пересекающимся траекториям.
• Возможность задавать «зоны безопасного движения» механизмов с учетом габаритов декораций.
• Несколько уровней доступа пользователей (разработчик, администратор, оператор, технический работник).
• Управление комплексом механоборудования с нескольких «главных» компьютерных пультов, локальных пультов, пультов радиоуправления и т.д.
Управление механизмом может осуществляться в двух режимах ручном и автоматическом.
Управление в ручном режиме подразумевает управление движением механизма в реальном времени, посредством использования элементов управления пульта (кнопки управления, джойстики). Как правило, в ручном режиме есть возможность регулирования направления движения и скорости перемещения механизма. В некоторых пультах есть возможность осуществления более точной настройки движения, путем добавления таких параметров, как точка конца пути, время, за которое механизм должен пройти заданное расстояние, время, за которое механизм должен замедлиться (перед полной остановкой) или ускориться (с момента начала движения).
Автоматический режим работы предполагает точное программирование всех параметров перемещения механизма заранее. При локальном взаимодействии с силовым шкафом команда от контролера идет непосредственно на привод, который осуществляет движение механизма. При локальном взаимодействии доступен только ручной режим работы.
Условно систему управления сценическими механизмами можно поделить на три основные части: сервер, главный пульт управления и привод механизма.
Главный пульт включает в себя 1 (и более, в случае необходимости) промышленный компьютер в зависимости от каждой конкретной сцены и набор мониторов, количество которых может разнится на разных сценических площадках в соответствие с их индивидуальными особенностями.
Элементы привода сценического механизма, подключенного к компьютерной системе для эффективной работы системы управления должны иметь: концевые выключатели, набор датчиков (положения, температуры, натяжения троса и т.д.), частотный преобразователь и контроллер управления приводом.
Для разрабатываемого механизма был выбран Пульт управления Wizard-12, который предназначен для работы в системе автоматизированного управления механикой сцены.
Основные функции.
Ограничение диапазона перемещения механизмов и позиционирование по маркам.
Организация группового движения, синхронизация механизмов по скорости, по времени, по координате.
Создание и редактирование сценариев.
Режим ручного управления.
Режим монтировки программирование движения механизмов по условиям.
Задание габаритов и массы подвешенных декораций. Проверка сценариев на наличие ошибок.
Возможность управления с нескольких пультов.
Программируемые функции для каждого уровня доступа наблюдения за механизмами в реальном времени с помощью видеокамер.

Рисунок 12. Пульт управления
Промышленный компьютер представляет собой техническое средство, предназначенное для обеспечения работы программных средств в промышленном производственном процессе в рамках автоматизации необходимых технических процессов. Его характеристики определяются потребностями конкретного предприятия и конкретной задачи. В театральной практике используется промышленный персональный компьютер (Промышленный ПК). В пульте управления может быть смонтирован один и более промышленный персональный компьютер. Это зависит от степени оснащенности театра сценической механизацией.
В данном случае будет расположен один персональный компьютер.
Сервер
Сервер — это компьютер, выделенный из группы персональных компьютеров для выполнения определенных серверных функций без непосредственного участия человека. Консоль (Монитор, Клавиатура, Мышь) необходимы только на стадии первичной настройки, при аппаратнотехническом обслуживании и управлении во внештатных ситуациях. Серверы размещаются в специально оборудованных комнатах, называемых серверными комнатами. В театральной практике в случае разделения верхней и нижней механизации сервера располагаются на галереях и в трюме для верхней и нижней механизации соответственно. Управление серверами осуществляют квалифицированные специалисты – системные администраторы.
В разрабатываемом проекте сервер IBM X3650 M4будет расположен в специально отведенном помещении рядом со сценой.

Рисунок 13. Сервер
Сетевой концентратор (хаб)
От английского hub – центр. Сетевой концентратор - устройство объединения компьютеров в локальную сеть Ethernet. В театре Ethernet является промышленной сетью и объединяет основные элементы компьютерной системы управления сценической механизацией.
Концентратор обычно имеет несколько портов, к которым при помощи различных сегментов кабеля подключаются конечные узлы компьютерной системы управления.
Концентратор объединяет физические сегменты сети в единую среду, доступ к которой осуществляется в соответствии с одним из протоколов локальных сетей. Основным достоинством использования сетевого концентратора является его низкая стоимость.
Выбираем сетевой концентратор RVi-NS0802, который обладает поддержкой стандарта питания PoE и обеспечивает возможность подключения устройств с повышенным энергопотреблением.

Рисунок 14. Сетевой концетратор
Контроллер
Контроллер – устройство управления, которым оснащается каждый привод системы управления механизмами. Основная задача контроллера заключается в том, чтобы собрать, обработать и преобразовать исходящие сигналы датчиков. Как только сигнал получен, контроллер приступает к обработке данных. Далее контроллер посылает информацию в виде управляющей команды на привод сценического механизма. То есть контроллер, собрав информацию с датчиков и обработав её по заданному алгоритму, подает управляющий сигнал на исполнительный механизм. Оператору остается лишь наблюдать за процессом управления (Перемещения механизма и менять алгоритм в случае необходимости при помощи командоконтроллера).
Концевые выключатели
Концевым выключателем называют аппарат, размыкающий или переключающий электрическую цепь питания машины или механизма, когда их подвижная часть достигает крайнего положения. В приборах театральных механизмов необходимо устанавливать двойную систему концевых выключателей: путевые и аварийные. Путевые концевые выключатели срабатывают, когда подвижная часть достигает крайнего допустимого положения. Аварийные концевые выключатели срабатывают при переходе механизмом границ допустимых положений. Конструкция концевых выключателей оптимизирована для использования в приводах сценических механизмов. Малогабаритный прочный корпус (обычно выполненный из металла) имеет элементы конструкции, позволяющие легко закрепить концевой выключатель в нужном месте лебедки. В данном механизме концевые выключатели устанавливаются не на лебёдку а не посредственно на площадку.

Рисунок 15. Концевой выключатель
Шкаф управления
Питание шкафа управления осуществляется путем подключения питающего кабеля к клеммам «L1», «L3», «L3», «РЕ», «N» от сети 380 В переменного тока. Отходящий кабель подключается к клеммам «U»,«V», «W», «РЕ» . Выходное напряжение –380 В переменного тока. Органы управления двигателем расположены на лицевой панели (двери) шкафа. Для
пуска двигателя необходимо включить переключатель S1 в режим «ПУСК». Далее управление двигателем может проходить как местно, так и дистанционно с помощью ПДУ. Кнопками SB1 и SB2
на передней панели либо «В» и «С» на ПДУ выбирается значение скорости двигателя. Переключателем S4 на передней панели либо кнопкой
«А» на ПДУ задается направление вращения двигателя. Переключатель S3
выбирает локальное или дистанционное управление.
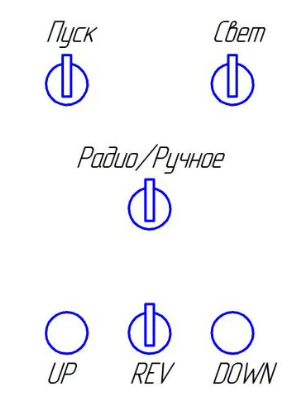
Рисунок 12. Лицевая сторона щкафа управления

Рисунок 12. Шкаф управления накладным-поворотным кругом
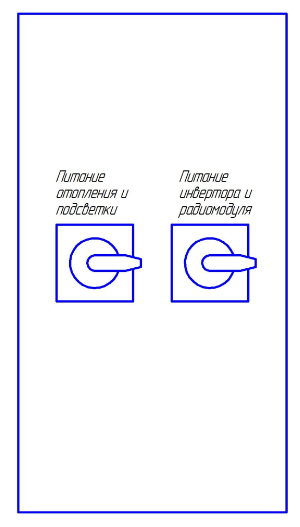
Рисунок 14. Боковая сторона шкафа управления
5. РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ МЕХАНИЗМА
Разборку и сборку оборудования поворотного круга выполняют по общим правилам и нормам машиностроения, используя прилагаемые рисунки и чертежи.
Сборку поворотного круга необходимо выполнять в следующем порядке:
Провести кабель электропитания через центральное отверстие поворотного узла и подсоединить его к токосъемным кольцам.
Установить поворотный узел в центр вращения подиума на ровную
поверхность. Закрепить неподвижную плиту к ровной
поверхности через отверстия Ø22мм (8 мест).
Собрать наружное обкатное кольцо диаметром 8000±10мм из 8
полуколец.
Наружное обкатное кольцо выставить соосно с неподвижной частью подиума и стянуть стяжками. Под обкатное кольцо положить резиновые прокладки от проскальзывания и/или закрепить с помощью фундаментных болтов на поверхности.
Вставить роликовые опоры (12 шт.) в сектора (12 шт.) в соответствии с монтажной схемой, предварительно смазав посадочное отверстие под роликовую опору консистентной смазкой типа солидол. Роликовые опоры затянуть гайкой.
Прикрепить сектора к неподвижной части круга (к восьмиграннику), в соответствии с порядковыми номерами. Порядковые номера указаны на секторах и восьмиграннике. Между соприкасающимися поверхностями в местах сбалчивания секторов установить резиновые прокладки. Также необходимо установить резиновую полосу между восьмигранником и каждым сектором, см. вид Б.
Поставить приводы вращенияв сектор 1 и сектор 5.
Для установки мотор-редуктора необходимо снять поджимающую пружину, из проушины достать палец. Установить мотор-редуктор так, чтобы поджимающий винт вошел в паз кронштейна мотор-редуктора, а втулку кронштейна выставить соосно в отверстии проушины. Вставить палец и зафиксировать шплинтом.
Поджать гайкой обкатное колесо. Усилие прижима – не менее 80 кгс.
Электрический кабель от мотор-редуктора проложить сквозь кольца, предназначенные от провисания кабеля, которые приварены к сектору.
Подключить электрический провод мотор-редуктора к электрической колодке в соответствии со схемой указанной на колодке. Убедиться, что кабель электропитания подиума и кабель электропитания мотор-редуктора не повреждены. В случае
повреждения кабелей необходимо их заменить. Подключить кабель электропитания к сети.
ПОВОРОТНЫЙ КРУГ ОБКАТАТЬ В ТЕЧЕНИИ 10 МИНУТ ПОД НАГРУЗКОЙ. В случае проскальзывания обкатного колеса, необходимо поджать пружину.
Крепление светодиодной ленты выполнить с помощью пластмассовых стяжек, так чтобы светодиодная лента была равномерно распределена по окружности трубы и не провисала.
Подключение светодиодных лент выполнить в соответствии со схемой электрической принципиальной. Блок питания, усилитель и
контроллер монтируются в распределительную коробку.
Уложить листы фанеры на сектора в соответствии с порядковыми номерами и прикрепить к секторам с помощью самонарезающих винтов.
6. СХЕМА ЭЛЕКТРОСНАБЖЕНИЯ МЕХАНИЗМА