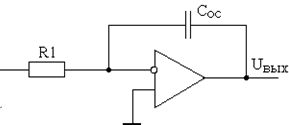
Датчик, построенные на базе трансформатора переменного тока.








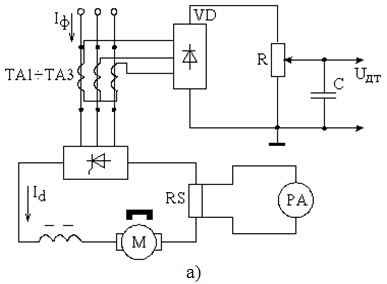 Этот датчик применяется в схемах с ТП
Этот датчик применяется в схемах с ТП
(рисунок 2а).
Id = 1,22×Iф (g = 0).
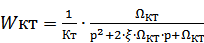
ПФ датчика тока:
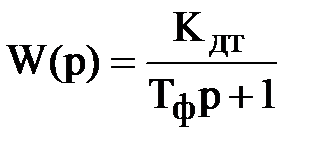 ;
;
 .
.
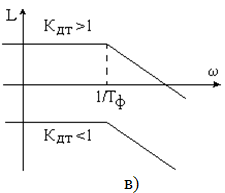
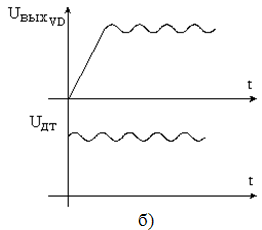
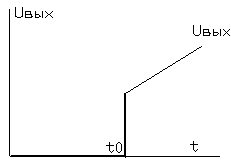
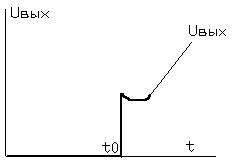
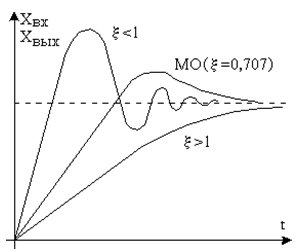
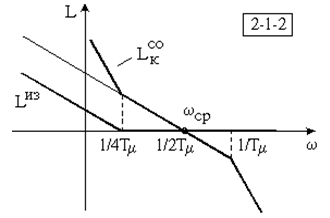
Временные зависимости выходных напряжений и ЛАЧХ датчика тока представлены на рисунках 2б, в, соответственно.
Достоинства: сигнал гальвани-чески развязан;
высокий коэф-нт усиления.
Недостаток: инер-ционность.
25 Регуляторы, применяемые в электроприводе. Схемы, реализация, работа, принцип настройки, передаточные функции.
В ЭП в основном применяют стандартные регуляторы, выполненные на базе ОУ. ОУ имеют несколько каскадов усиления: входной дифференциальный каскад имеет 2 входа: инверт. и неинверт. На инверт. входе ↑ сигнала на входе приводит к ↓ выходного сигнала. На неинверт. – наоборот. ОУ имеет высокое вх. сопрот. Внутренние каскады обеспечивают промежуточное усиление. Выходной каскад – эммитерный повторитель. Он обеспечивает малое выходное сопрот. Кu – коэффициент усиления (103 ÷ 106). Необходима коррекция частотных характеристик, т.к. возможны автоколебания, когда ОУ охватываются ОС. Цепи коррекции индивидуальны. Применяются схемы компенсации уровня выходного сигнала. Регуляторы ЭП строят на основе ОУ, охватываемых ОС. Наибольшее применение нашли следующие регуляторы:
 П-регулятор. ОС –жесткая.
П-регулятор. ОС –жесткая.
R1
| К1 |
W(p)=kп
Kп=R1/R0
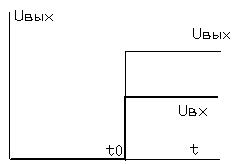
Вид преобразования Uвых=К*Uвх
В пределах полосы пропускания
ЭП ЛАЧХ регулятора – прямая линия.
 L=20 lgkp
L=20 lgkp
И-регулятор Uвых=1/T1  ;
;
W(p)=1/T1p; T1=R1∙Сос
ПИ-регулятор представляет собой союз П и И регулятор.
 R1 C1
R1 C1
| К1 |
 W(p)=kп(1+pT1)/pT1
W(p)=kп(1+pT1)/pT1
kп=R1/R0; T1=R1C1
ПИД-регулятор выполняет одновременно действие 3-х регуляторов.
R1 C1
| К1 |
W(р)=kп+1/Тиp+Tдр
Wпит(p)=kп(1+pT1)(1+pT2)/pT1
kп=R1/R0; T1=R1C1;T2=R0C0
Этот регулятор достаточно сложен, много параметров настройки, поэтому находит ограниченное применение
26. Регул-й ЭП пост-го тока с ОС по скорости. Сх., работа, структурная сх.
Cтруктура РЭП опр-ся ОС и системой регуляторов, которые производят обработку информации и вырабатывают управляющее воздействие, поступающее на силовой преобразователь.
РЭП с ООС по w .
Для получения большего диапазона регулирования D необходимо повысить  жёсткость механических характеристик. С этой целью вводится ООС по ω. Вообще наличие ООС по ω – признак ЭП с большим диапазоном регулирования ω.
жёсткость механических характеристик. С этой целью вводится ООС по ω. Вообще наличие ООС по ω – признак ЭП с большим диапазоном регулирования ω.
Структура РЭП.
 ;
;  ;
; 
 – статизм, определяется технологическим регламентом.
– статизм, определяется технологическим регламентом.
При изменении нагрузки скорость падает на  ω. По ω определяется S, который задаётся регламентом и не должен превышать Sдоп. Такое требование определяет нижний уровень допустимой скорости:
ω. По ω определяется S, который задаётся регламентом и не должен превышать Sдоп. Такое требование определяет нижний уровень допустимой скорости:
 откуда определяется возможный диапазон регулирования:
откуда определяется возможный диапазон регулирования:
 что подтверждает необходимость увеличения жёсткости β для получения большего D. Из структурной схемы для разомкнутой системы:
что подтверждает необходимость увеличения жёсткости β для получения большего D. Из структурной схемы для разомкнутой системы:
W(p)=W1*Uз(p)-W2*Mс(p)
Где W1, W2 – ПФ по управлению и возмущению.
В статике p=0 и имеем  К1*Uз-К2*Mс;
К1*Uз-К2*Mс;
Где К1 и К2 коэф. преобразования
 тогда Dраз.=
тогда Dраз.= 
При введении ООС по ω:  ;
;
После преобразований: βзам=βраз/1+К; где К=Кос*К1 – общий коэф. преобразования
В результате D увеличивается в Краз. Вывод: ООС по ω основное средство увеличения D. Схема реализации:
| BR-датчик скорости(тахогенератор) AR-регулятор(П, ПИ) Регулирование скорости - вниз от Wном путем изменения Uя. |
Структурная схема РЭП с ООС ДПТ:
Уравнение динамики:
ω(p)=W1*Uз(p)-W2*Мс(p)=ω0- ω
Для разомкнутой цепи: ω(p)=Wрег*Wп*W1*(Uз(p)-Uос(p))-W2*Mc(p); где Uoc(p)=Woc(p)*ω(p)
Подставив Uoc и решив относ. ω получаем:
ωрег(р)=  ;
;
W1– эл.часть двигателя
Получена общая формула регулирования ω, которая может быть конкретизирована для каждого конкретного случая.
 ;
; 

При отрицательной ос по ω:
ω=К1*(Uз-Кос*ω)-К2*М
ω= 
 ;
;
 ;
;
 ;
;
 ; К
; К 
β в замкнутой системе больше в К раз β разомкнутой системы т.е. механические характеристики стали более жёсткими т.е. скорость ω в меньшей степени зависит от нагрузки. Соответственно диапазон регулирования в замкнутой системе:


27. Регул-й ЭП пост. тока с ОС по ск-ти и току с отсечкой.
В ЭП станков и роботов широко прим. эта система. Схема реализации:
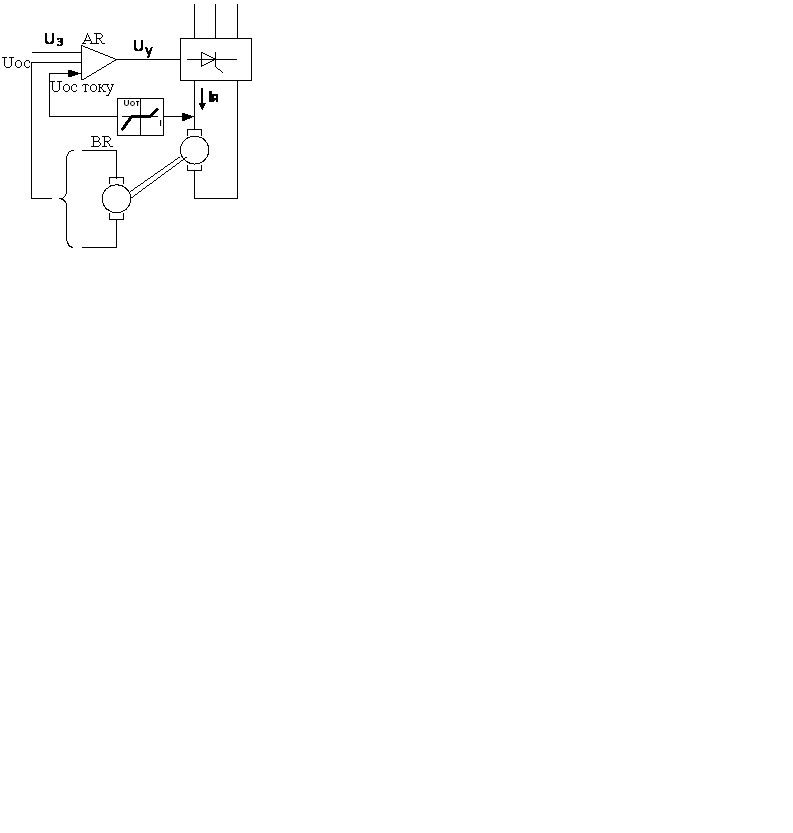
ОС по току нелинейная, её действие:
Iст-ток стопорения; Iост-ток отсечки.
Пока Iя< Iост(нормальные нагрузки) Uост=0. Если Iя>Iост в СУ вводится сильная ООС по току, которая ограничивает величину Iя на заданном уровне, соответственно и моменте. Характеристика имеет 2 участка:
На 1 участке: действие ООС только по ω и жёсткость характеристики велика. При большем моменте(нагрузки) срабатывает отсечка по току, добавляется сильная ОС по I, которая уменьшает Uвых преобразует и снижает жёсткость механической характеристики. Наклон резко увеличивается, такие характеристики называются экскаваторными, для экскаватора это естественная работа. Привод с отсечкой по I может работать на жёсткий упор при ω=0. Ток Iя при ω=0 называют ток стопорения. Реализация отсечки:
В схеме, снимаемое с шунта напряжение Uш=Iя*Rш сравнивается с опорным Uоп. Если Uш<Uоп, ток I1 равен 0 => Uвых=0 и Uвых=I1*R. При больших токах Uш> Uоп и ток I1 будет иметь противоположное направление, диод VD открывается, протекает ток по резистору R, на нём возникает напряжение, которое и является напряжением отсечки. Отсечка по току позволяет стабилизировать усилие, момент при работе на упор.;отсечка по току также осуществляет предохранительные функции, ограничивает максимальный ток при перегрузках. Необходимость ограничения момента М для избежания механических поломок.
28. САУ ЭПом с подчиненным регулированием координат. Выбор регуляторов и их настройка.
Эта с-ма реализует пр-п последов-й коррекции. Т.е. объект регул-я представ-ся в виде пос-но соед-ных звеньев, вых-ми пар-ми кот-х яв-ся корд-ты объекта, подлежащие контролю: I, U, E, Ф, M, ω, φ, полож-е. Для упр-ния каждой корд-й реализ-ся свой отд-й рег-р. Рег-р вместе с объектом с контрол-мой корд-ой образ-т контур с замкнутой ОС, рег-ры соед-ны посл-но так, что выход одного яв-ся входом другого. Замкнутые контуры образуют с-му вписанных др. в друга контуров.
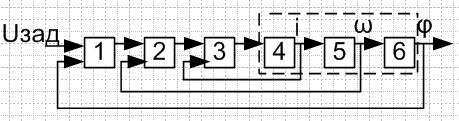 1-3 регулято-ры, 4-6 объект рег-я.
1-3 регулято-ры, 4-6 объект рег-я.
Вых-й сиг-нал каждого внешнего кон-тура яв. задающим для пос-щего внутр-го, в рез-те вн-й контур подчинен соотв-щему внешнему. Преим-ва: упрощ-ся задача огран-я контрол-х координат, облегчается наладка, сокращ-ся сроки пуска объктов. Нед-ки: проигрыш по быстродей-ю.
Оптимиз-ю (настройку) сист нач-т с внутр-го контура. Оптимизир-в его перех-т к след-му и т.д. при перекъзоде к след-му контуру W подчин-го контура упрощают, аппроксим-в контур 1-го порядка. Новая нескомпенсир-я пост-я вр. выбирается с учитом желаемого быстрод-я внутр-го контура и датчиков ОС. След-й контур аналогично. Некоменс-я пост-я вр берется равной 2Тм, где Тм – пост-я вр пред-го контура. Быстрод-е внеш-го контура д.б. в 2 раза меньше, чем внутр-го.
Настройка параметров цепей ОС по току и по скорости носит компромиссный характер по отношению к каждому настраив. параметру и не является оптим. Этот недостаток отсутствует в системе подчиненного регулирования (СПР).
СПР предст. собой многоконт-ю систему с каскадным включением регуляторов. При этом число регуляторов и контуров регулирования соответ-т числу регулируемых параметров.
Выходной сигнал внешнего регулятора явл-ся задающим для регулятора внутреннего контура.
Достоинства: настройка регуляторов производится независимо от остальных параметров. Настройка от внутреннего к внешнему.
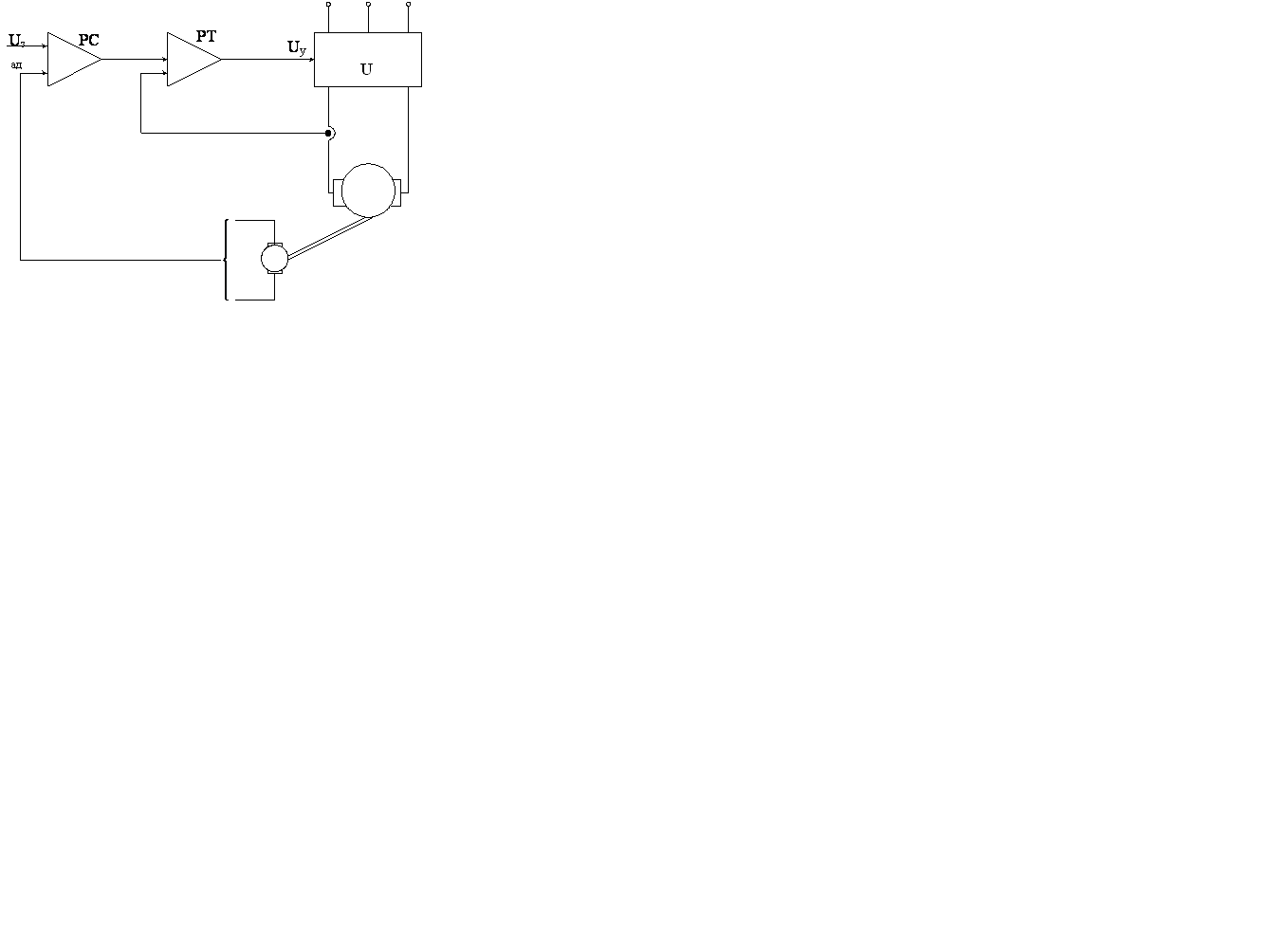 Схема реализации
Схема реализации
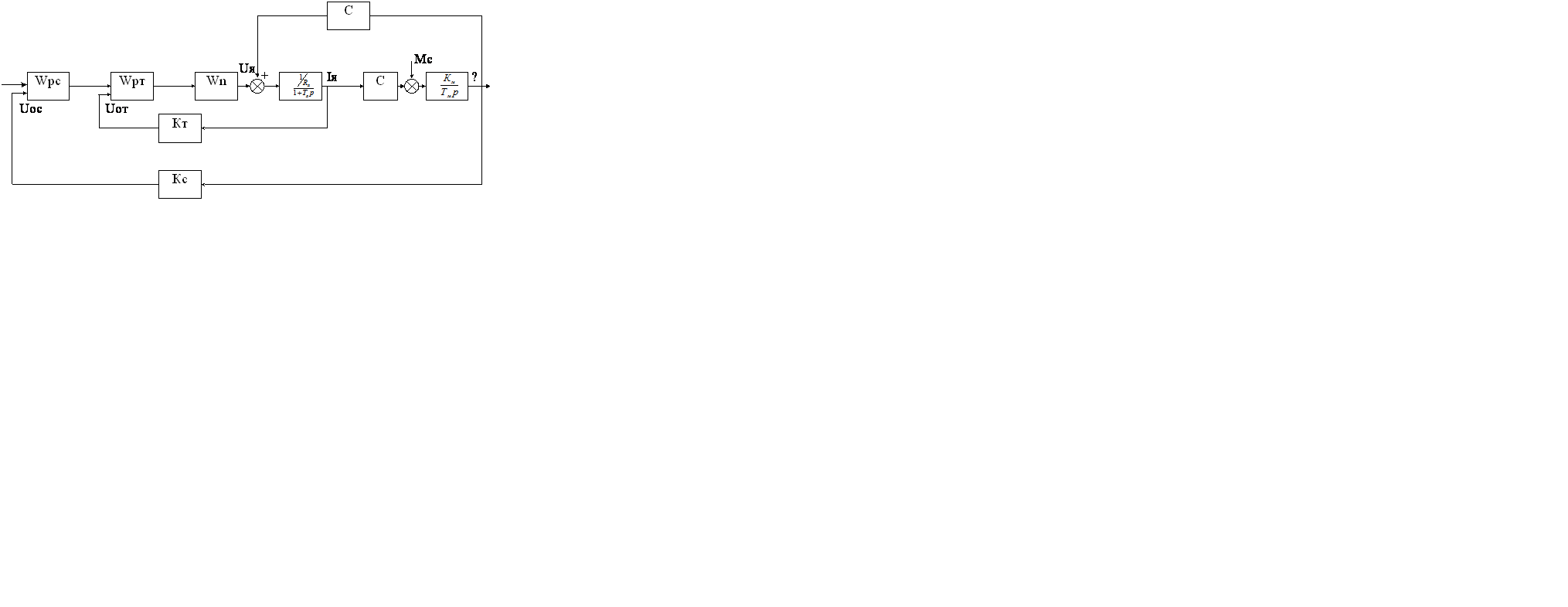
Структурная схема
Настройка PI -рег-ра на технический(модульный) оптимум:
При станд-й настройке контура тока пренебр-м внутр-й ОС по ЭДС. Это справедливо, если
 Объект рег-ния упрощ-ся, контур тока сод-т тирист-й пр-ль и цепь якоря.
Объект рег-ния упрощ-ся, контур тока сод-т тирист-й пр-ль и цепь якоря.
 Объект сод-т одну бол-ю пост-ю вр Тя и малую пост-ю вр
Объект сод-т одну бол-ю пост-ю вр Тя и малую пост-ю вр  . Задача рег-ра компенсация бол-й пост-й вр объекта, а малую - нецелесообразно компенсировать из усл-я помехозащищ-сти и ее б наз-ть некомпенсир-й. Применим ПИ-рег-р тока:
. Задача рег-ра компенсация бол-й пост-й вр объекта, а малую - нецелесообразно компенсировать из усл-я помехозащищ-сти и ее б наз-ть некомпенсир-й. Применим ПИ-рег-р тока:
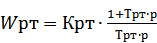 Примем Трт равным Тя с целью компенсации, тогда W разомкнутой системы.
Примем Трт равным Тя с целью компенсации, тогда W разомкнутой системы.


Придадим формуле канонич-ю форму:
 - контур тока.
- контур тока.
 - коэф-нт демпфир-я, от него зав-т х-р ПП-в.
- коэф-нт демпфир-я, от него зав-т х-р ПП-в.
 – резонансная частота.
– резонансная частота.
Обычно выбир-т  , тогда ПП носят апер-й х-р. Если произв-е проц-ы допускают некот-ю колеб-сть ПП-в при неб-м перерег-нии, то
, тогда ПП носят апер-й х-р. Если произв-е проц-ы допускают некот-ю колеб-сть ПП-в при неб-м перерег-нии, то  выбир-т < 1, что приводит к улучш-ю динамики (быстрод-е). При настройке на тех-й оптимум
выбир-т < 1, что приводит к улучш-ю динамики (быстрод-е). При настройке на тех-й оптимум  . Тогда:
. Тогда:  , Трт = Тя.
, Трт = Тя.
 Настройка на МО является компромиссной. Быстрод-е контура можно ув-ть, но вместе с тем рас-тет перерег-ние, аналогично перерег-ние можно ум-ть, но ум-ся и быстрод-е. s = 4,3% – перерег-ние;
Настройка на МО является компромиссной. Быстрод-е контура можно ув-ть, но вместе с тем рас-тет перерег-ние, аналогично перерег-ние можно ум-ть, но ум-ся и быстрод-е. s = 4,3% – перерег-ние;
 Настройка PI -рег-ра на симметричный оптимум:
Настройка PI -рег-ра на симметричный оптимум:
Пусть W оптимиз-го контура тока имеет вид:  Тогда разом конт
Тогда разом конт
 (1) (Wрс, Wкт, Wмех.часть ЭД). При настройке на СО пар-ры выбир-т:
(1) (Wрс, Wкт, Wмех.часть ЭД). При настройке на СО пар-ры выбир-т:
Трс = 8  ,
,  (2)
(2)
Подставив (2) в (1):
 В рез-те рег-р скомп-л бол-ю пост-ю вр Тм и динамика контура опр-ся только малой Wзамкнутого контура скорости.
В рез-те рег-р скомп-л бол-ю пост-ю вр Тм и динамика контура опр-ся только малой Wзамкнутого контура скорости.

Наличие значит-х форсир-щих сост-щих в числителе приводит к появл-ю пика на частот-й х-ке. В обл. низких частот:
 Оптимиз-й контур скорости м представить колеб-м звеном с пост-й вр Т=
Оптимиз-й контур скорости м представить колеб-м звеном с пост-й вр Т=  . И коэф-нтом демпфир-я
. И коэф-нтом демпфир-я 
Наличие форсир-щего звена в W приводит к значит-му перерег-нию 43%. Вр. 1-го достиж-я максимума 0,1  , т.е. быстрод-е выше, чем при настройке на ТО. На практике перерег-ние ум-т до 8%, если на вх контура вкл-т апер-й фильтр с пост-й вр Тф = 8ч.
, т.е. быстрод-е выше, чем при настройке на ТО. На практике перерег-ние ум-т до 8%, если на вх контура вкл-т апер-й фильтр с пост-й вр Тф = 8ч.
ЛАЧХ симметрична относ-но частоты среза – назв-е м-да.
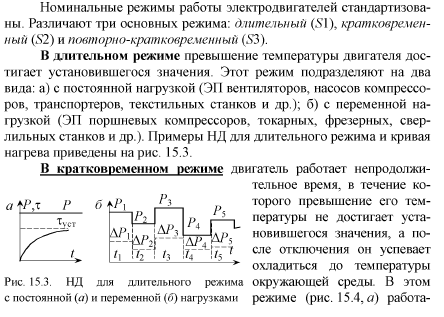
29. Нагрев и охлаждение ЭД. Ур-е теплового баланса. Классы электроизоляции по нагревостойкости.
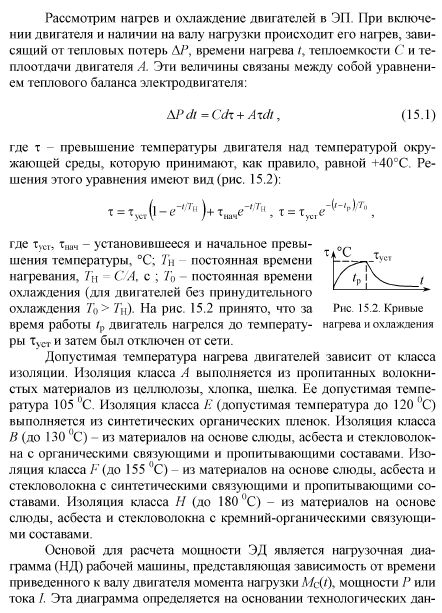
ЭД при работе м нагреваться только до опр-й (допустимой) t-ры. Соблюдение огранич-й, наложенных заводом-изготовителем удлиняют срок службы до 10 – 15 лет. Превыш-е t-ры на 10 градусов – ускоренное старение изоляции и срок службы сокращается в 2 раза. При включ-и ЭД-ля в сеть и наличии на его валу нагрузки происх-т его нагрев, зав-щий от тепловых потерь ΔР, времени нагрева t, теплоемкости С и теплоотдачи ЭД-ля А. Эти в-ны св-ны между собой ур-нием теплового баланса ЭД-ля:
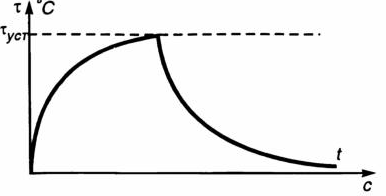 ΔР·dt = C·dτ + A·τ·dt, Вт·с,
ΔР·dt = C·dτ + A·τ·dt, Вт·с,
где τ - превышение t-ры ЭД-ля над t-рой охлаждающей среды, которую принимают, как правило, равной +40°С. Реш-е этого ур-ния дает зав-сть изменения превышения t-ры ЭД-ля во времени. Зав-сть имеет экспоненциальный характер.
τ = τуст(1 - e-1/Тн) + τнач e-1/Тн,
где τуст - установившееся превышение t-ры, °С; τнач – нач-е превышение t-ры, °С; Тн - постоянная времени нагревания.
Классы изоляции:
| Класс изоляции | Предельно доп-я t-ра | Основные компоненты |
| A | 105 | х/б ткани, бумага, шелк |
| B | 130 | Слюда, асбест, сткловолокно. Связующие органические |
| F | 155 | Слюда, асбест, сткловолокно. Связующие синтетические |
| H | 180 | Слюда, асбест, сткловолокно. Связующие кремнийорганические |
| C | >180 | Слюда,асбест,сткловолокно. Связующие неорганические |
30. Режимы работы ЭД. Выбор двигателей по мощности для основных режимов работы.
Осн-м тербованием при выборе явл-ся его соотв-е усл-м технолог-го проц рабочей области. Задача сост-т в поиске такого ЭД, который: 1) обесп-т технолог-й цикл машины; 2) соотв-т усл-м окр-щей среды и компоновке с раб-й машиной; 3) им-т нормативный (допуст-й) нагрев.
1) Выбор ЭД недостаточной мощ-сти приводит к наруш-ю заданного технолог-го цикла, сниж-ю производ-сти раб-й машины, повыш-е нагрева, ускорен-му старению изоляции, преждевр-му выходу из строя.
2) Не следует завышать мощ-сть, т.к. при этом повыш-ся стоимостные затраты на покупку ЭД, cosфи (т.к. ЭД оказ-ся недогруж-м). Поэтому надо оптимиз-ть ЭД по мощности. Пос-сть: - расчет мощности, - преддверие выбора; - проверка ЭД по усл-м пуска, перегрузки, нагреву. Если проверка дала прож-й рез-т, то на этом заканч-ся. Иначе выбир-ся ЭД большей мощ-сти и провека повторяется.
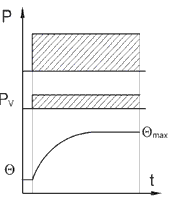 1.Продолжительный номинальный режим ( S 1) - режим работы при неизменной ном-ой нагрузке, прод-ся до тех пор, пока превыш-я t-ры всех частей эл-ой машины достигнут устан-ся знач-й (насосы, вентиляторы, эскалаторы).
1.Продолжительный номинальный режим ( S 1) - режим работы при неизменной ном-ой нагрузке, прод-ся до тех пор, пока превыш-я t-ры всех частей эл-ой машины достигнут устан-ся знач-й (насосы, вентиляторы, эскалаторы).
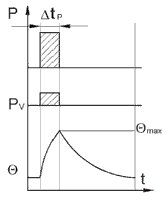 2. Кратковременный ном-ый режим ( S 2) – Работа машины при неизменной нагрузке Р в течение времени Δtp, недост-го для достижения всеми частями машины установ-ся t-ры, после чего следует остановка машины на время, достаточное для охлаж-дения машины до t-ры, не более чем на 2°С превышающей t-ру окружающей среды.
2. Кратковременный ном-ый режим ( S 2) – Работа машины при неизменной нагрузке Р в течение времени Δtp, недост-го для достижения всеми частями машины установ-ся t-ры, после чего следует остановка машины на время, достаточное для охлаж-дения машины до t-ры, не более чем на 2°С превышающей t-ру окружающей среды.
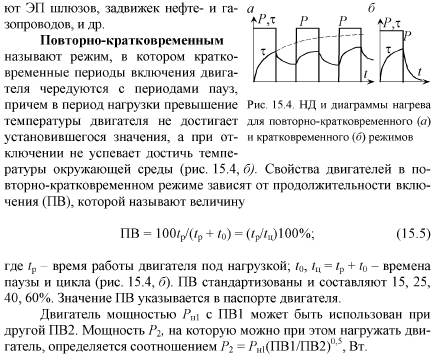
3. Повторно-кратковременный режим работы ( S 3) – Послед-ть идентичных циклов работы, каждый из которых включает время работы при неизменной нагрузке, за которое машина не нагревается до установившейся температуры, и время стоянки, за которое машина не охлаждается до температуры окружающей среды. При этом 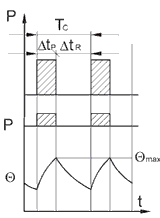 потери при пуске не оказывают влияния на температуру частей машины.
потери при пуске не оказывают влияния на температуру частей машины.
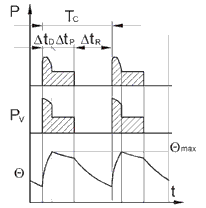 4. Повторно-кратковременный режим работы с частыми пусками( S 4) – Послед-сть идентичных режимов работы, каждый из которых включает время пуска ΔtD время работы при постоянной нагрузке ΔtP, за которое двигатель не нагревается до установившейся температуры, и время стоянки ΔtR, за которое двигатель не охлаждается до температуры окружающей среды.
4. Повторно-кратковременный режим работы с частыми пусками( S 4) – Послед-сть идентичных режимов работы, каждый из которых включает время пуска ΔtD время работы при постоянной нагрузке ΔtP, за которое двигатель не нагревается до установившейся температуры, и время стоянки ΔtR, за которое двигатель не охлаждается до температуры окружающей среды.
5. ( S 4) и + эл-м торможением ( S 5) - режим, включающий в себя те же элементы, что и S4 с дополнительным периодом ΔtF быстрого электрического торможения.
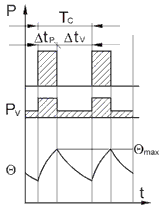 6. Перемежающийся режим работы (S6) - Последовательность идентичных циклов, каждый из которых включает время работы ΔtP с постоянной нагрузкой Р и время работы на холостом ходу ΔtV, при чём длительность этих периодов такова, что температура двигателя не достигает установившегося значения.
6. Перемежающийся режим работы (S6) - Последовательность идентичных циклов, каждый из которых включает время работы ΔtP с постоянной нагрузкой Р и время работы на холостом ходу ΔtV, при чём длительность этих периодов такова, что температура двигателя не достигает установившегося значения.
7.Перемежающийся ном-й режим работы ЭД с частыми реверсами
8. Перемежающийся ном-й режим работы ЭД с двумя и более скоростями.
Выбор двигателей по мощности:
S1- ном-я мощ-тьЭД опред-ся на основе статич-ой мощности мех-ма Pм:
Pном=kзап*Рм/ηмех передачи; kзап-коэф запаса 1,05-1,1