
Динамическое торможение








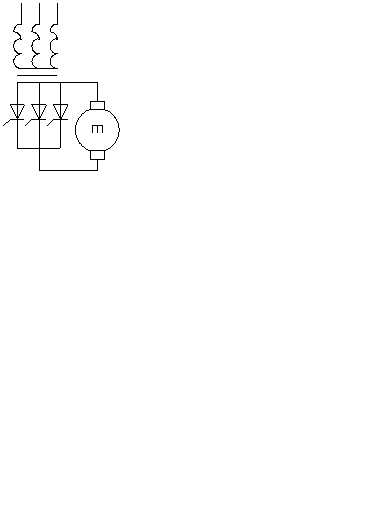
Этот тормозной режим используется для точной остановки мощных двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т.е. он станет тормозным. Под действием этого момента происходит торможение. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать время торможения. Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После остановки двигатель нужно отключить от сети постоянного тока.
 На рис. 2.26 показаны схемы включения асинхронного двигателя и механические характеристики при динамическом торможении.
На рис. 2.26 показаны схемы включения асинхронного двигателя и механические характеристики при динамическом торможении.
Пусть двигатель работает с нагрузкой в точке A. При подаче на обмотку статора постоянного напряжения рабочая точка перейдет из точки A в точку B тормозной характеристики 2.
Рис. 2.26
Под действием тормозного электромагнитного момента будет происходить снижение частоты вращения до полной остановки (точка 0).
Основные недостатки динамического торможения: необходим источник постоянного тока и неэкономичность.
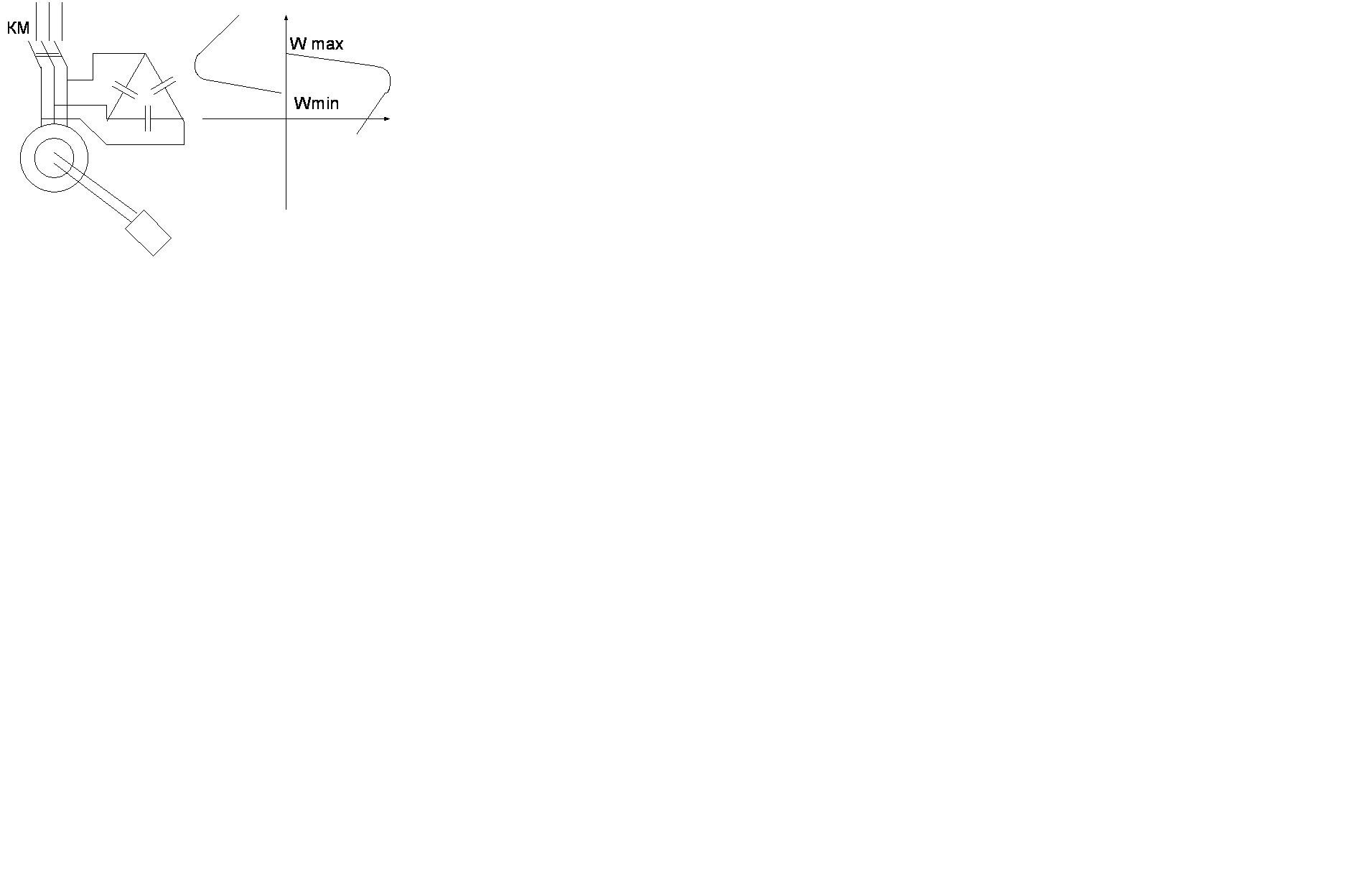 Конденсаторное торможение. Реакт-я мощ-сть не созд-т мех-ю эн-ю. индукт-е токи необх, чтобы намагничить машину. Исп-т треуг-к (вкл-м конденсаторы) т.к. в 3р больше мощность. После отключ-я от сети ротор по инерции вращается, Рт раб-т в р-ме генератора с самовозбужд-м. Самовоз-буждение – за счет остат-го магнетизма – небол-е ЭДС, протекает малый ток Iс, опережающий по фазе U на 90°, т.е. явл-ся реак-тивным (намагнич-щим), создающим доп-е усиление МП, а это в свою очередь усиливает ЭДС…., ток возрастает пока не доходит до насыщения. Т.о. реакт-я мощ-сть, необх-я для возб-я, поступает благодаря конденсаторам. После самовозб-я АД перех-т в генер-й р-м и созд-т Мт. Мех-я х-ка огранич-ся 2мя скор-ми. С ↑ емкости Wmin ↓. Конденс-е тормож-е оказ-ет большой эффект в начале торможения (в отличие от динамич-го торможения). Схемы просты и экономичны, при глухом подключ-и конденсаторов дост-но откл-ть ЭД от сети. А во вр. работы конденсаторы ув-т cosφ ЭД. Часто прим-т сочетание конден-саторного и динамич-го торм-я — тормозной эффект при этом усиливается на всем диапазоне скоростей.
Конденсаторное торможение. Реакт-я мощ-сть не созд-т мех-ю эн-ю. индукт-е токи необх, чтобы намагничить машину. Исп-т треуг-к (вкл-м конденсаторы) т.к. в 3р больше мощность. После отключ-я от сети ротор по инерции вращается, Рт раб-т в р-ме генератора с самовозбужд-м. Самовоз-буждение – за счет остат-го магнетизма – небол-е ЭДС, протекает малый ток Iс, опережающий по фазе U на 90°, т.е. явл-ся реак-тивным (намагнич-щим), создающим доп-е усиление МП, а это в свою очередь усиливает ЭДС…., ток возрастает пока не доходит до насыщения. Т.о. реакт-я мощ-сть, необх-я для возб-я, поступает благодаря конденсаторам. После самовозб-я АД перех-т в генер-й р-м и созд-т Мт. Мех-я х-ка огранич-ся 2мя скор-ми. С ↑ емкости Wmin ↓. Конденс-е тормож-е оказ-ет большой эффект в начале торможения (в отличие от динамич-го торможения). Схемы просты и экономичны, при глухом подключ-и конденсаторов дост-но откл-ть ЭД от сети. А во вр. работы конденсаторы ув-т cosφ ЭД. Часто прим-т сочетание конден-саторного и динамич-го торм-я — тормозной эффект при этом усиливается на всем диапазоне скоростей.
20. Работа АД в режиме низких “ползучих” скоростей. Реализация, схема, применение.
 В системе точного позиционир-я (лифты) перед полной остановкой и тормож-м ЭП переключ-ся на очень низкие ско-рости (ползучие). Требов-е: чтобы на низких скоростях работа была уст-й. Для реш-я вопроса производят наложение двух р-мов: двигат-го и тормоз-го. В рез-те на валу ЭД создается доп-ный тормозной момент. Чаще применяют сочетание двигательного режима и динамического торможения.
В системе точного позиционир-я (лифты) перед полной остановкой и тормож-м ЭП переключ-ся на очень низкие ско-рости (ползучие). Требов-е: чтобы на низких скоростях работа была уст-й. Для реш-я вопроса производят наложение двух р-мов: двигат-го и тормоз-го. В рез-те на валу ЭД создается доп-ный тормозной момент. Чаще применяют сочетание двигательного режима и динамического торможения.
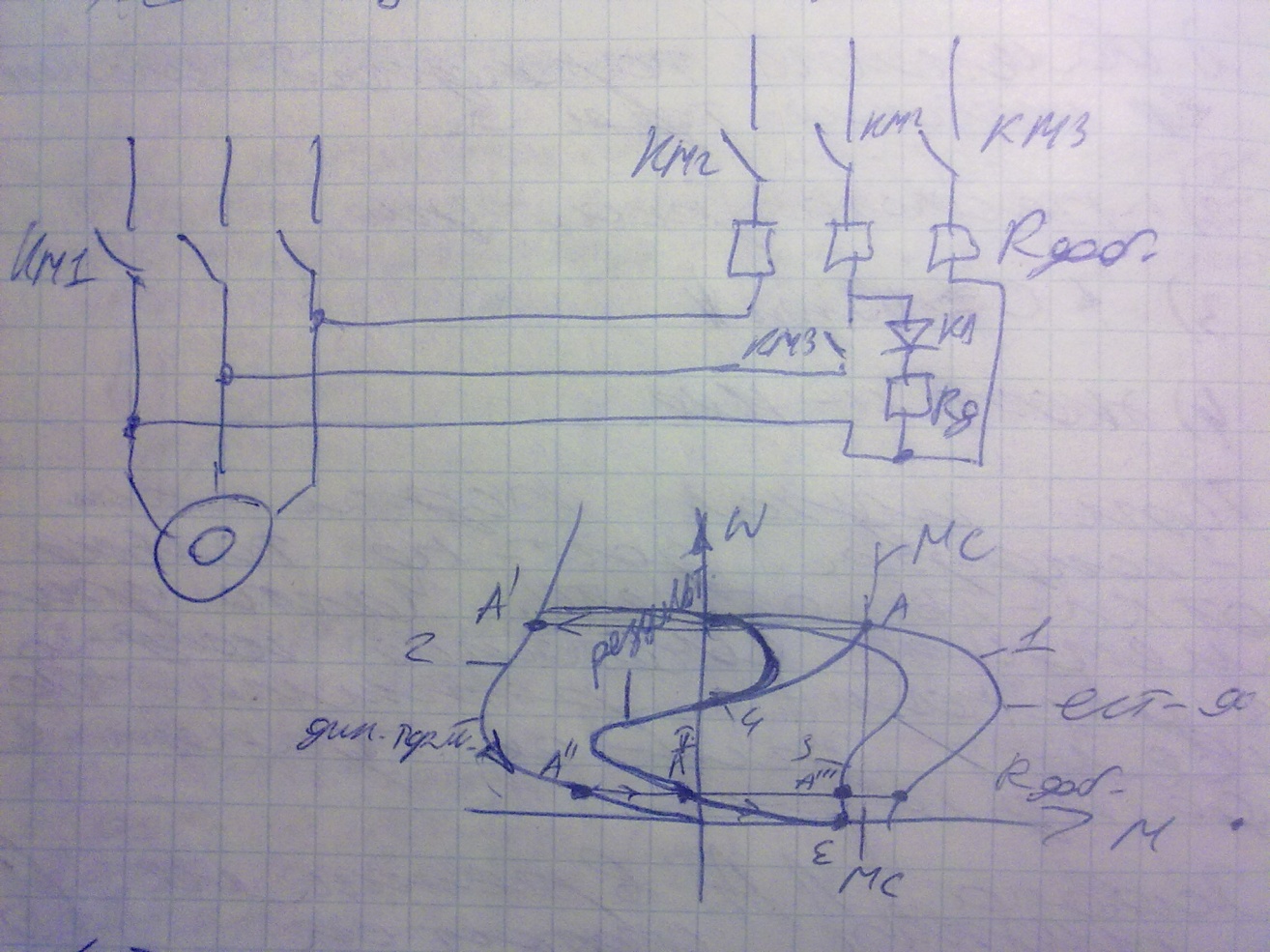
На схеме реализации: т А—нормальная работа, через КМ1. Для перехода на ползучую скорость КМ1 откл-ся, и КМ2 вкл-ся. ЭД переходит на динамич-е торм-е (2 квадрант). Скорость ↓ прим-но до т.С (в схеме предусмотрено реле времени). В этот м-нт это реле вкл-т контактор КМ3. АД получает доп-е питание от сети ч/з Rд. На них падает U, U на вх. ниже, мех-я х-ка – искусств-я и вписана в естеств-ю. В рез-те ЭД находится под одновр-ном возд-и пост-го и перем-го токов, а х-ка ЭД явл-ся суммарной от пост-го и переем-го токов. В т. А”’ перешли на результирующую х-ку под действием Mc, а в т. А’’’’ установившаяся работа.
Результирующая характеристика имеет участок в области низких (ползучих) скоростей. Этот участок отличается высокой степенью жесткости, и работа на нем обеспечивает получение низкой устойчивой скорости, мало изменяющейся при колебаниях нагрузки.
Участок ползучих скоростей в зависимости от наклона характеристики динамического торможения может а) пересекаться с осью ординат и заходить в область отрицательных моментов, что соответствует устойчивой ползучей скорости, поскольку в этом случае для разгона двигателя до подсинхронных скоростей необходимо приложить значительные вращающие моменты;
б) касаться оси ординат, что соответствует неустойчивому режиму, когда незначительные посторонние вращающие моменты могут разогнать двигатель до скоростей, близких к синхронной и соответствующих верхнему участку механической характеристики;
в) не заходить во второй квадрант, что соответствует неустойчивому режиму, когда уменьшение М до значений, меньших М может привести к разгону двигателя до подсинхронных скоростей.
Максимальный момент, развиваемый на ползучей скорости, не превышает пускового момента, который двигатель развивает на своей естественной характеристике. Отсюда следует, что для режимов ползучих скоростей весьма удачными являются двигатели с повышенным скольжением и повышенным пусковым моментом, а также двигатели с ротором (массивным ферромагнитным ротором).
Достоинства: регул-я х-ка им-т протяженный произв-й пологий участок. Работа А4 при низких скор-х составит неск-ко %-в от номин-й.Недостаток: несимметрич-сть тока по фазам магн-го потока и созд-т вибрацию.
21. Силовые преобразователи ДПТ. Сх., работа, хар-ки.
Предназначены для преобразования переменного напряжения в постоянное.
Тирист-й управ-й выпрямитель – рег-ние напряж-я происх-т путем изм-я фазового угла управ-го импульса, кот. открывает тиристор и тем самым измен-т длит-сть его работы в оставшуюся часть полупериода.
К рис. - среднее знач-е – эквив-й по площади прямоуг-к. Для ↓-я кол-ва пульсаций выпрямленного Uния прим-т многофазные сх-мы преобр-лей. Разделяют на нулевые и полумостовые (1-но тактовые) и мостовые (2-х тактовые). На сх. показан нулевой.
ea, eb, ec –изм-е уровня +го потенциала, кот. м. производить переключ-е тиристоров. t1, t2, t3, t4 – характерные точки, в кот. пр-т измене уровня потенциалов, в кот м. происх-ть коммутация (переключение) тиристоров. Эти м-нты наз-ся м-нтами естеств-го открывания тиристоров. Если включ-е производить в указанные м-нты, то средняя ЭДС преобр-ля:
 где m – кол-во фаз. В даном случае m=3 =>
где m – кол-во фаз. В даном случае m=3 =>  . Ось ординат сдвинута на
. Ось ординат сдвинута на  .
.
 Если упр-щий импульс смещен относ-ноо t1, t2… на угол a, то:
Если упр-щий импульс смещен относ-ноо t1, t2… на угол a, то:


Внешняя хар-ка. U отличается от Е потерями на сопрот-е.
Ud = Ed - ∆Uт - ∆UR - ∆Uk
Ed = E0*cosα
∆Uт – падение на тиристоре 1 В; ∆UR – падение на акт-м сопр-нии трансформатора (I*Rтр); ∆Uk – падение Uния вызванное коммутацией тиристоров. ∆Uk больше чем сумма (∆Uт+∆UR).
Сущ-т м-нт вр., когда 1 тиристор еще не отключился, а 2-й не вкл-н. Поток рассеяния → часть U-ния не доходит до приемника.
Тогда ур-ние внешней х-ки трансформатора:

 С ↑-ем нагрузки I, Ud ↓-ся. Разл-т режимы непрерывистых и прерывистых токов (нежелат-й). В р-ме непрер-х токов ток в нагрузке прерыв-ся, зав-т от фазового угла α, в-ны индукт-сти нагрузки (катодной), вел-ны тока нагрузки. Пусть L мало, тогда нагрузка акт-я и ток повторяет U-ние, тогда если
С ↑-ем нагрузки I, Ud ↓-ся. Разл-т режимы непрерывистых и прерывистых токов (нежелат-й). В р-ме непрер-х токов ток в нагрузке прерыв-ся, зав-т от фазового угла α, в-ны индукт-сти нагрузки (катодной), вел-ны тока нагрузки. Пусть L мало, тогда нагрузка акт-я и ток повторяет U-ние, тогда если  больше (
больше (  ) (90-60=30), то наступ-т р-м прерывистых токов. Зав-т от L, от нагрузки (
) (90-60=30), то наступ-т р-м прерывистых токов. Зав-т от L, от нагрузки (  , от угла упр-я. В р-ме прер-х токов U-ние снижается больше, чем в р-ме непрер-х токов при ув-нии нагрузки.
, от угла упр-я. В р-ме прер-х токов U-ние снижается больше, чем в р-ме непрер-х токов при ув-нии нагрузки.
Инверторный р-м работы преобр-ля. Преобр-ль м работать в инвертор-м р-ме, кот прим-ся для рекуперативного тормож-я. В этом р-ме ЭДС якоря больше ЭЛС преобр-ля (Ud), а Iя < 0.
Инвер-й р-м прим-ся для рекупер-го торм-я. ЭДС якоря Ея больше ЭДС пр-ля, а Iя меньше 0 (меняет напр-е). Но из-за одностор-й проводимости тиристоров ток иного напр-я протекать не м (от К к А), поэтому реализ-я рекупер-й эн-и ЭД в сеть возм-но только при соохр-и прежнего напр-я тока якоря. Для этого необх изм-ть поляр-сть якоря (поменять местами выходы со щеток). Но при этом если ЭДС преоб-ля имеет прежнее напр-е, то ток в контуре пр-ль-ЭД-… резко возрастает и равен:
22. Силовые преобразователи двиг-ей переменного тока. Сх., работа, хар-ки.
Пр-ль частоты опр-т мощ-сть привода (т.к. вкл-н в силовую цепь), экономич-сть и диап-н рег-я. Кроме измен-я частоты он обеспеч-т необ-й ток и U-ние. Прим-т тиристорные и транзисторные преобразователи. Разл-т:
1) автономные ПЧ с промежуточным звеном пост-го тока с инвертором (АЧН и АЧТ). Можно изменять частоту вверх и вниз от номин-й (соотв-но и скорость)
2) непосред-е ПЧ (НПЧ) без звена пост=го тока. М изменять частоту только вниз от номинала. Причем если номинал 50Гц, то следующая возможная частота примерно 30 Гц, а далее – плавно.
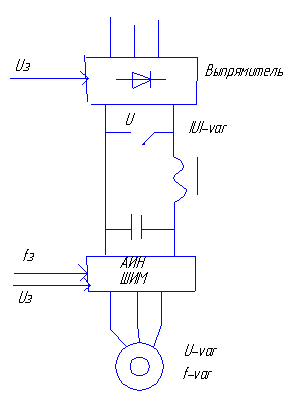
Схемы ПЧ с АИН:
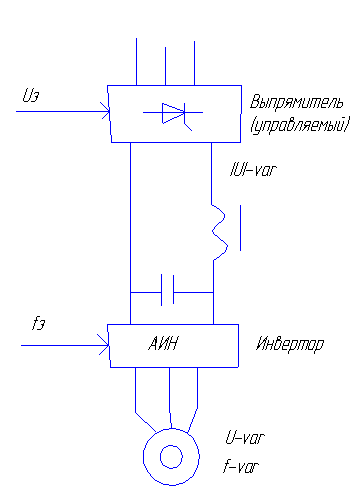 Ампл-ное рег-е напр-я с пом-ью упр-го выпр-ля. Имеем двухступенчатое преобразование.
Ампл-ное рег-е напр-я с пом-ью упр-го выпр-ля. Имеем двухступенчатое преобразование.
Многочисленное совр-ое обор-е пром-х и коммерческих техн-ий, исп-ое в широком диап-е мощн-ей, требует трехфазного питания перем-о тока с необ-ой ампл-ой и частотой. При исп-ии в качестве осн-го ист-ка энергии переем-го тока пром-ой сети преобр-ли обеспечивают:
Стаб-ю вых-го напр-ия при постоянстве частоты 50 Гц в системах бесперебойного питания [1, 2];
Рег-е ампл-ы и частоты вых-го напр-я в электропр-х переем-го тока [4], сис-х электротермической тех-и и т.п.
 В авт-х сис-х электроснабжения (авиационных, корабельных, наз-го тран-та) и ветроэнергетических -ах напр-е ген-ра переем-го тока, как правило, изм-ся в широком диап-е как по ампл-де, так и по частоте. Это обст-во наклад-ет особые треб-ия на преобр-ли для обесп-ия стаб-го или рег-го электроп-ия разл-ого типа нагрузок.
В авт-х сис-х электроснабжения (авиационных, корабельных, наз-го тран-та) и ветроэнергетических -ах напр-е ген-ра переем-го тока, как правило, изм-ся в широком диап-е как по ампл-де, так и по частоте. Это обст-во наклад-ет особые треб-ия на преобр-ли для обесп-ия стаб-го или рег-го электроп-ия разл-ого типа нагрузок.
В сис-х с двойным преобр-ем энергии (ДПЭ) происходит преобр-ие энергии переем-го тока в энергию пост-го тока, а затем наоборот.
Во вх-ом каскаде таких сис-м могут исп-ся: НВ – неупр-ый выпр-ель (диодный мостовой выпр-ль);УВ – упр-ый выпр-ль (тир-ый мостовой выпрямитель);ШИМ - выпрямитель (IGBT мостовой выпрямитель).
Выходные каскады в сис-ах ДПЭ вып-ся на основе: НЧ - коммутатора (тир-ый или IGBT мостовой инв-р с коммутацией на осн-ой частоте вых-го напр-я);ШИМ – инв-ра (IGBT мостовой инвертор с ШИМ управлением);
однополярного ШИМ-преобр-ля и НЧ-коммутатора.
НЧК находят прим-е в преобр-ях ЭП. Переем-го тока
Однополярный ШИМ – преобр-ль, форм-ий напр-е в виде полуволн син-ой формы, и низкоча-ый коммутатор НЧК, инвертир-ий эти полуволны в напр-ие переем-го тока, находят свое прим-ие в ряде сист-х бесп-го Эпитан.
Наиб. шир. прим-ие пол-ли ШИМ – инвер-ры, форм-е в соче-и с вых-и фильт-ми син-е нап-я основной частоты.
В последние годы в связи со знач-ым прогрессом в созд-и быстрод-их сил-ых полупроводн-ых приб-в наметилась тенд-я к созд-ю более совер-х топологий преоб-й переем-го тока. К таким топологиям, в первую очередь, отн-я матричные и гибридные структуры. Это объясняется стремлением решить следующие основные задачи:
Улуч-е энерг-х пок-ей сис-ы (коэф-та мощн-ти и кпд);
Миним-я высших гармоник вх-го и вых-го токов для обесп-ия требований ЭМС по входу и выходу преобразователя;
Улуч-е массогабар-х пок-ей преобр-лей за счет сниж-ия величин исполь-х реак-ых элементов;
расширение мощностного диапазона преобразователей.
23. Динамические св-ва тирист-го преобраз-ля как эл-та САУ ЭПом.
Т.к. тиристор – эл-нт с огранич-м упр-нием (когда вкл-ся – теряем упр-мость), то преобр-ль рассм-т как дискретный эл-нт. Т.е. упр-щий сигнал не выз-т мгновенного измен-я выпрямляемого напр-я. Время запаздывания зависит от частоты сети, схемы выпрям. и угла управления. Предельное время запаздывания:
Тзтп=1/mf. , m – число фаз выпрямл-я, f-частота сети. Мостовая – 6, полумостовая – 3. Получили предельное вр запаздыв-я.
Можно предст-ть ТП звеном чистого запазд-я с перед-й ф-цией:

Инерц-е св-ва СИФУ м учесть, представив ее апериод-м звеном с малой постоянной времени:  .
.
Тогда передаточная функция:
1  ,
,
где  - общий коэффициент усиления
- общий коэффициент усиления  . Раскладывая степенную функцию в ряд и ограничиваясь 1-м членом:
. Раскладывая степенную функцию в ряд и ограничиваясь 1-м членом:
 .
.
Так как  и
и  малы, то действие 2-х апериодических звеньев с малыми постоянными времени можно заменить одним апериодическим звеном с суммарной постоянной времени:
малы, то действие 2-х апериодических звеньев с малыми постоянными времени можно заменить одним апериодическим звеном с суммарной постоянной времени:
(1+  ) (1+
) (1+  ) = (1+Tp).Т-постоянная времени преобразователя В результате,
) = (1+Tp).Т-постоянная времени преобразователя В результате,  .
.
24. Датчики, прим-е в ЭПах пост. и пер-го тока. Сх., реализ-я , работа.
Датчики пост. тока
Шунт – самый распространенный датчик постоянного тока (комбинированное термостабилизированное сопротивление) рис. 1. В соответствии с рисунком 2б, ПФ шунта:
 .
.
ВАХшунта представлена на рисунке 1в.
UШН = 75мВ; IШН – от 1А до 7,5кА.
ЛАЧХ представлена на рисунке 1г.
 Достоинства данного вида датчика тока: простота;точность.
Достоинства данного вида датчика тока: простота;точность.
Недостатки: низкий уровень выходного сигнала; гальваническая связь с силовой схемой.