
14. Режимы работы АД. Полная мех-я х-ка. Ф-ла Клосса.








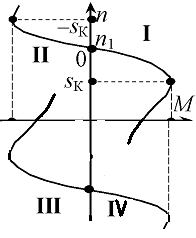
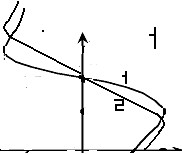
Полная механическая характеристика АД (обозначить точки опрокидывания, холостого хода)
Квадранты: 1 – двигат-й режим, 2 – генерат-й, 4 – противовкл-е(Режим электромагнитного тормоза) - Если изменить направление вращения ротора или магнитного поля так, чтобы они вращались в противоположных направлениях, но машина будет потреблять из сети активную мощность. Однако электромагнитный момент будет направлен встречно моменту нагрузки, являясь тормозящим. Для режима справедливы неравенства:

Этот режим применяют кратковременно, так как при нём в роторе выделяется много тепла, которое двигатель не способен рассеять, что может вывести его из строя.
Уточненная ф-ла Клосса. Когда при моделир-м дост-но иметь формализ-ю зав-сть, не содерж-щую конкр-х физ-х данных, то делим

на

Получаем: 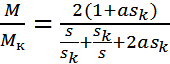 – уточн. форм. Клосса
– уточн. форм. Клосса
a=R1/R’2, если они не известны, то условно м принять а=1,3. В приближ-х расчетах а = 0.
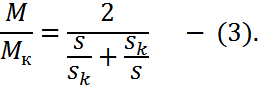
Упрощенная ф-ла Клосса:
Жесткость мех-й х-ки: 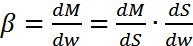 т.к.
т.к.  , где
, где  – скорость МП, а w – скорость Рт.
– скорость МП, а w – скорость Рт. 
В переходных режимах необходимо учесть влияние электромагнитной инерции:
где  — постоянная времени инерции, второе
— постоянная времени инерции, второе  — поправка. Дифференц-м (3):
— поправка. Дифференц-м (3):  - (4). При S<Sk,
- (4). При S<Sk,  <0, если S>Sk, >0, - опрокидывание. От 0 до Sк – рабочий.
<0, если S>Sk, >0, - опрокидывание. От 0 до Sк – рабочий.
15. Искусственные мех-е х-ки АД в различных режимах.
 АД с фазным ротором позв-ет менять пар-ры ротора путем введения разл-х добавочных сопр-ний (чаще активных). При пуске Ммах=Мкритич-й
АД с фазным ротором позв-ет менять пар-ры ротора путем введения разл-х добавочных сопр-ний (чаще активных). При пуске Ммах=Мкритич-й
 , где 3 – число фаз. Мк=const (R не входит). А
, где 3 – число фаз. Мк=const (R не входит). А  и изменяется пропор-но R2.
и изменяется пропор-но R2.
 1) Рис 1 – введ-е добавоч-го сопр-ния. Мкр остается пост-ным, а Sкрит=R’2/Xk и пропорц-но изменяется R2. 1 – естеств-я х-ка, 2 –искусств-я х-ка. Преимущества: лучшие пуск-е св-ва. Реостат огранич-т пусковые токи и ув-т М пусковой. “-”: Жесткость х-ки (чувст-сть к нагрузке) с ув-нием Rдоб ум-ся. М. применять для регулир-я скорости, но сущ-но сниж-ся КПД. Привлекает простотой.
1) Рис 1 – введ-е добавоч-го сопр-ния. Мкр остается пост-ным, а Sкрит=R’2/Xk и пропорц-но изменяется R2. 1 – естеств-я х-ка, 2 –искусств-я х-ка. Преимущества: лучшие пуск-е св-ва. Реостат огранич-т пусковые токи и ув-т М пусковой. “-”: Жесткость х-ки (чувст-сть к нагрузке) с ув-нием Rдоб ум-ся. М. применять для регулир-я скорости, но сущ-но сниж-ся КПД. Привлекает простотой.
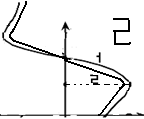
2) Введение в цепь Рт индуктив-го сопр-ния (Х2 добав-е) (рис 2) приводит к ↓S критического и ↓М критического, поэтому данный метод применяют редко. Пуск-й м-нт ум-ся, КПД ув-ся, cos φ ум-ся (за счет введ-я доп-й идукт-сти). Прим-ся редко.
3) введ-е емкостного сопр-ния будет приводить к ↓ Xk (индукт-е сопр-е КЗ АД) (  )→↑Мк (↑ нагрузочная спос-сть) из-за сложной реализации на практике не применяется.
)→↑Мк (↑ нагрузочная спос-сть) из-за сложной реализации на практике не применяется.
4) введ-е R доб в цепь статора.
 ,
,  . За счет включ-я реостата ув-ся R1. По формулам м сделать вывод, что введение Rдоб ↓S критич-е и ↓М критич-й. (х-ки аналогичны при введ-и Х2д). Прим-ся для огранич-я пуск-х токов.
. За счет включ-я реостата ув-ся R1. По формулам м сделать вывод, что введение Rдоб ↓S критич-е и ↓М критич-й. (х-ки аналогичны при введ-и Х2д). Прим-ся для огранич-я пуск-х токов.
5) влияние питающего U и f. А) U -ние. Естеств-е U м.б. только ум-но в пределах раб-го участка мех-й х-ки.
 тогда
тогда

При f1=const ум-ние U1 приводит к ум-нию Ф. Т.к. в номин-м р-ме магн-я цепь насыщена, то повыш-е U приводит к быстрому возраст-ю тока намагничив-я и даже при ХХ I > Iном, и ЭД м. нагреваться этим током выше допустимой t-ры. U ув-ть нецелесообразно, мал-е ∆U приводит к большому ∆I. U при f1=const рассм-ся как вспом-е упр-щее возд-е при упр-нием ЭД ч/з поток.
Б) изм-е f. Приводит к изм-и скорости МП.
 – эл-я скорость, если число пар полюсов =1, то эл-я и мех-я скорость равны. Изм-е частоты приводит к обратно пропорц-му изменению магн-го потока при усл-и, что U1=const (380В). Т.к. в номин-м р-ме машина насыщена (естеств-я х-ка), то допускается изм-е частоты только в сторону ув-ния.
– эл-я скорость, если число пар полюсов =1, то эл-я и мех-я скорость равны. Изм-е частоты приводит к обратно пропорц-му изменению магн-го потока при усл-и, что U1=const (380В). Т.к. в номин-м р-ме машина насыщена (естеств-я х-ка), то допускается изм-е частоты только в сторону ув-ния.
Для сниж-я w необх ум-ть f < fном. Но при этом треб-ся ум-ть U настолько, чтобы Ф оставалось примерно одинаковым. Наск-ко надо изм-ть U при изм-и f – з-ны рег-ния. Напр. u/f=const. Они зав-т от вида нагрузки.
16. АД с фазным ротором. Устройство, схема, достоинства, х-ки, пуск, регулир-е скорости.
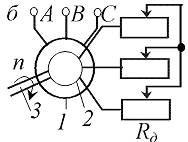
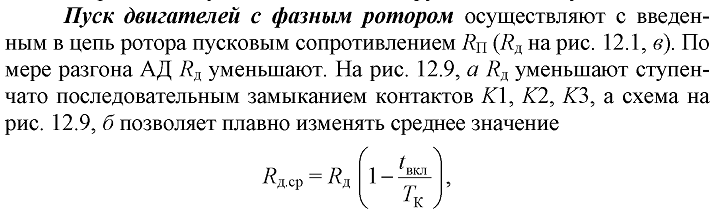
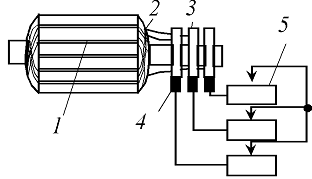 В пазах 1 фазного ротора нах-ся трехфазная обмотка 2, соединенная звездой. Ее концы припаяны к изолир-м от вала кольцам 3, к кот примыкают подпружин-е щетки 4. Щетки и кольца образуют эл-е контакты, ч/з кот-е к обмотке ротора подключается 3хфазный реостат 5. Реостат 5 м.б. пусковым (для огранич-я пусковых токов ротора и статора и ув-ния пуск-го м-нта АД), регулировочным (для изменения частоты вращения ротора) или пуско-регулировочным. На 2й схеме приведена электрическая схема.
В пазах 1 фазного ротора нах-ся трехфазная обмотка 2, соединенная звездой. Ее концы припаяны к изолир-м от вала кольцам 3, к кот примыкают подпружин-е щетки 4. Щетки и кольца образуют эл-е контакты, ч/з кот-е к обмотке ротора подключается 3хфазный реостат 5. Реостат 5 м.б. пусковым (для огранич-я пусковых токов ротора и статора и ув-ния пуск-го м-нта АД), регулировочным (для изменения частоты вращения ротора) или пуско-регулировочным. На 2й схеме приведена электрическая схема.

17. Частотное рег-ние АД. Законы регулирования, х-ки.

18. Многоскоростные АД. Устройство, схема, х-ки, область применения.
 Часто пром-сти не требуется плавное рег-ние скорости. Исп-т 2,3,4-скоростные АД, в кот-х измен-е скорости осущ-ся за счет изменения числа пар полюсов. При переключ-и полу-обмоток (полю-сов) статора с послед-го соед-я на параллельное, число пар полю-сов Рп ум-ся в два раза. До переключения Рис 1. После Рис 2.
Часто пром-сти не требуется плавное рег-ние скорости. Исп-т 2,3,4-скоростные АД, в кот-х измен-е скорости осущ-ся за счет изменения числа пар полюсов. При переключ-и полу-обмоток (полю-сов) статора с послед-го соед-я на параллельное, число пар полю-сов Рп ум-ся в два раза. До переключения Рис 1. После Рис 2.
 В рез-те ЭД становится в 2 раза быстро-ходнее.
В рез-те ЭД становится в 2 раза быстро-ходнее.
Наиболее распр-ны схемы переключения с одинарной на двойную звезду и с треугольника на двойную звезду. Они эквив-ны по скоростным кач-вам, но имеют разл-я по нагрузкам.
 Рассмотрим схему переключения с одинарной на двойную звезду:
Рассмотрим схему переключения с одинарной на двойную звезду:


Расчет для 1-й фазы:
wYY=2wY

Переключение с одинарной на двойную звезду ув-т скорость в 2 раза при пост-м м-нте сопротивления.
При переключении с двойной звезды на треугольник:  ,
, 
4-хскоростные – в Ст 2 независимые обмотки, каждая из которых состоит из 2-х полуобмоток.
3-хскоростные – 2 независимые обмотки, 1 из них состоит из 2-х полуобмоток.
В зависимости от условий работы электродвигателя предъявляют два основных требования к полюсопереключаемой обмотке. В одном случае для обеих скоростей нужен неизменный вращающий момент двигателя. В виде примера можно привести электродвигатель для привода воздушного компрессора, у которого необходимый вращающий момент не меняется при изменении скорости. Мощность такого двигателя возрастает пропорционально скорости вращения.
В другом случае мощность двигателя должна оставаться постоянной при изменении скорости вращения. Примером могут служить двигатели сверлильных станков. Эти требования выполняют путем соответствующего соединения фаз обмотки.
Применение многоскоростных электродвигателей позволяет упростить передачи; повысить производительность установок; устранить шумы и вибрации от работы зубчатых передач; упростить автоматическое управление процессами пуска, останова, реверсирования и торможения и, наконец, что очень важно, повысить коэффициент полезного действия установки благодаря снижению потерь в передачах.
19. Тормозные режимы АД. Реализация, схемы х-ки, применение.
.1)Торможение противовключением
Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.

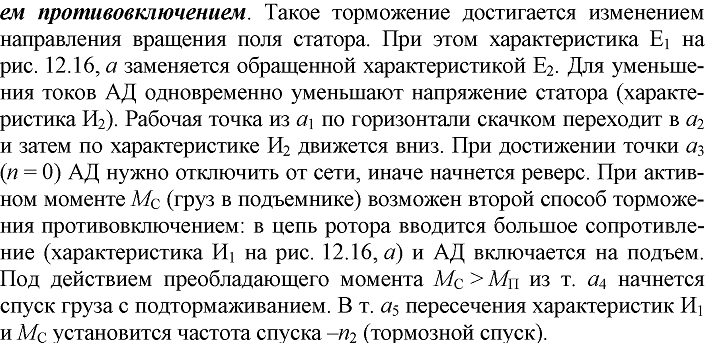
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
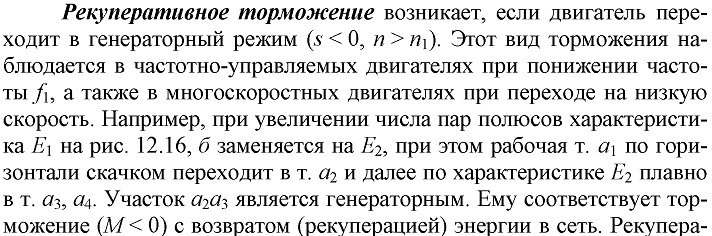
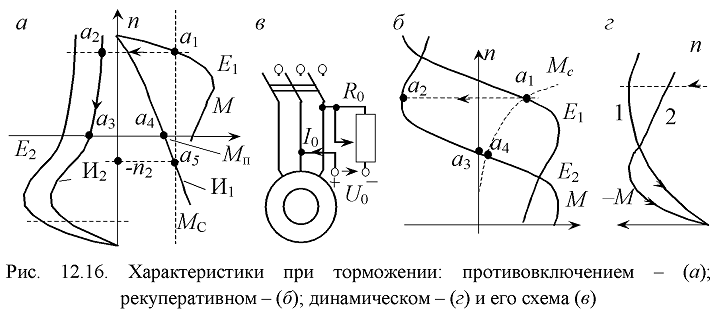

Генераторное торможение является самым экономичным режимом, т.к. происходит преобразование механической энергии в электрическую и возврат энергии в сеть. Одним из достоинств этого тормозного режима является его самопроизвольное появление, т.е. не требуется никакая контролирующая аппаратура.