
7[2 вариант(неисправленная шпора) ВЫБИРАЙТЕ какой больше нравится]








 - ур-е эл-го равн-я, эл-я цепь якоря.
- ур-е эл-го равн-я, эл-я цепь якоря.
 - эл-я цепь возбужд-я
- эл-я цепь возбужд-я
 - ур-ние электромех-й связи
- ур-ние электромех-й связи
 – ур-ние дв-я св. ЭД с мех-мом. СИСТ (1)
– ур-ние дв-я св. ЭД с мех-мом. СИСТ (1)
Где  – ЭДС самоиндукции, возник-щая в ПП при измен-и тока якоря,
– ЭДС самоиндукции, возник-щая в ПП при измен-и тока якоря,  - ЭДС вращ-я якоря – влияние реал-й нагрузки на эл-ю цепь.
- ЭДС вращ-я якоря – влияние реал-й нагрузки на эл-ю цепь.
 - актив-е R-е якорной цепи (сама обмотка, доп-е полюса, комп-я обмотка, добавочное (реост-е).
- актив-е R-е якорной цепи (сама обмотка, доп-е полюса, комп-я обмотка, добавочное (реост-е).
Полная индуктивность якорной цепи:

 – констр-й коэф-т ЭД, где
– констр-й коэф-т ЭД, где  - число пар полюсов, N – число акт-х проводников якоря, участв-х в созд-и м-нта, а – число параллельных ветвей обмотки якоря, Ф – магн-й поток возб-я,
- число пар полюсов, N – число акт-х проводников якоря, участв-х в созд-и м-нта, а – число параллельных ветвей обмотки якоря, Ф – магн-й поток возб-я,  - индук-сть ОВ; М – ЭМ-ный м-нт ЭД, Мс – м-нт сопр-я нагрузки, J – м-нт инерции привода.
- индук-сть ОВ; М – ЭМ-ный м-нт ЭД, Мс – м-нт сопр-я нагрузки, J – м-нт инерции привода.
J=Jдв+Jпривед-го мех-ма [кг/м2].При расчетах К и Ф отд-но не исп-ся: КФ=С. Сном=КФном. Его нах-т из ф-лы статич-го равновесия цепи якоря:


Преобр-м (1) d/dt=р, Тя=Lя/Rя, Тв=Lв/Rв [с]. Получим
 ;
;  ; ;
; ; 
Если М рассм как упр-щее воздействие дял мех-й сист, то ДПТ НВ прни Ф=const п/с апериод-е звено с пост-ным временем Тя, где Тя=Lя/Rя приближ-но м. рассчитать:
Решая сист (1) относ. w при C=const и Мс=const:

Решая относ м-нта при тех же усл-х: (сист. 5)

 – [В/Вс=1/с] – Скорость Х.Х.
– [В/Вс=1/с] – Скорость Х.Х.  – изм-е скорости, вызв-е падением напряж-я на Rя от тока нагрузки.
– изм-е скорости, вызв-е падением напряж-я на Rя от тока нагрузки.  - динам-й м-нт. Динам-я сост-щая м-нта, развиваемая ЭД, вызванная изм-м питающего якорь U-ния.
- динам-й м-нт. Динам-я сост-щая м-нта, развиваемая ЭД, вызванная изм-м питающего якорь U-ния. 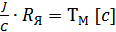 - электромех-я пост-я вр. Тогда перед-я функция при возмущении по упр-ю:
- электромех-я пост-я вр. Тогда перед-я функция при возмущении по упр-ю:

Перед-я функция из-за нагрузки:

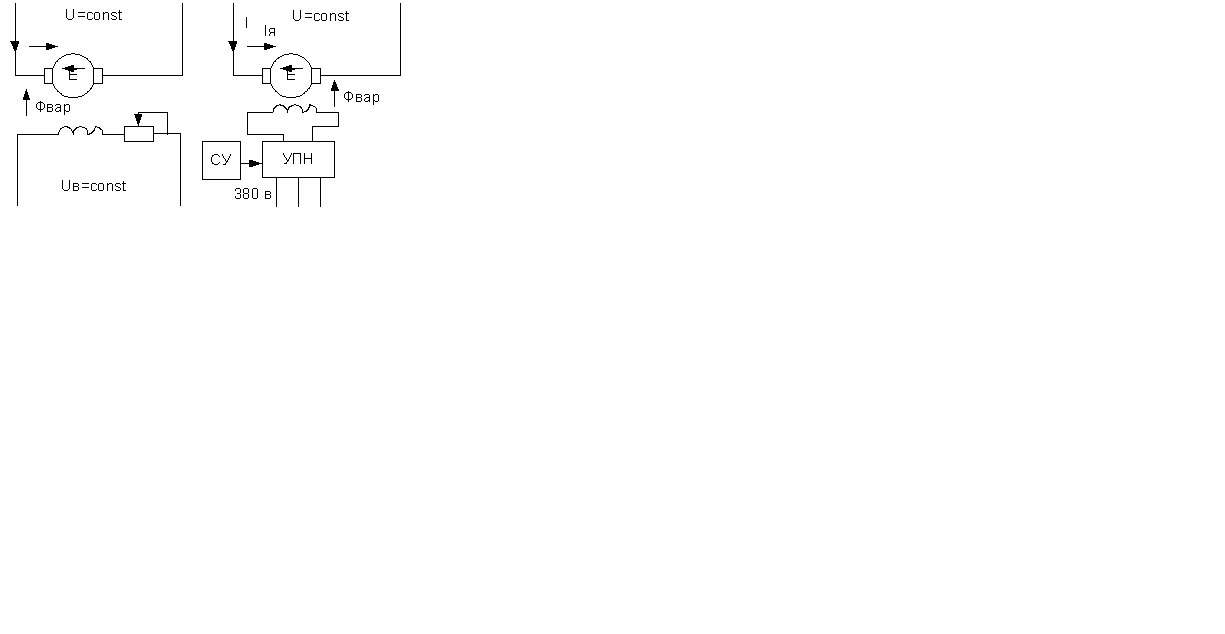
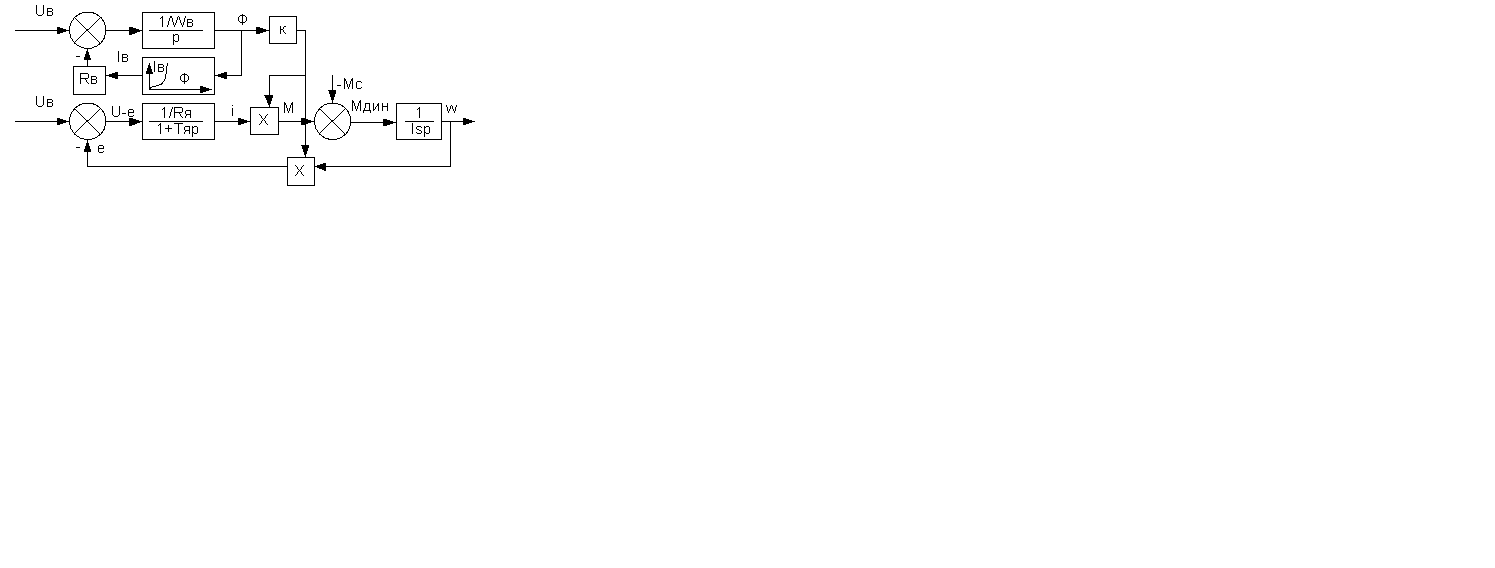
По (5) м. составить структурную схему:
Там имеется внутр-я ОС м/д мех-й и эл=й частями по ЭДС:
e=КФw=Cw. При наличии быстрод-щих рег-в на прямых кана-лах м. пренебречь. Частотная х-ка по упр-ю м.б. найдена из перед-х функций при замене р→jw.
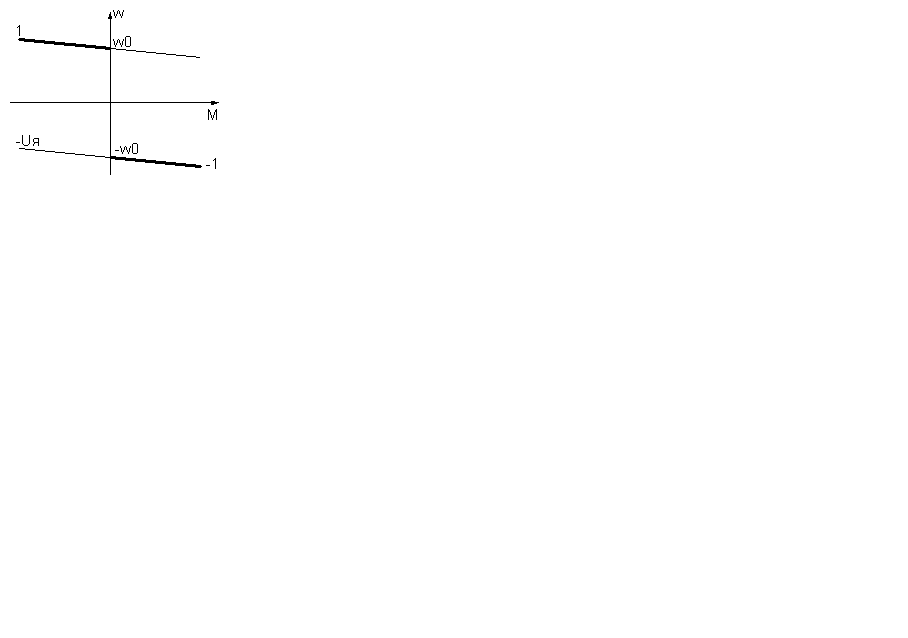
8.ВЛИЯНИЕ МАГН-ГО ПОТОКА НА СВ-ВА ДПТ НВ. РЕАЛИЗАЦИЯ, СХЕМА, ХАР-КИ, ОГРАНИЧЕНИЯ, ПРИМЕНЕНИЕ.
В данном случае 
 Увел.Ф>Фном возможно лишь на 10-20% из-за насыщ. магн. цепи., но и это возможно только при большом увеличении Iв в несколько раз.Но т.к. это увеличивает нагрев то применяют только уменьшение Ф.
Увел.Ф>Фном возможно лишь на 10-20% из-за насыщ. магн. цепи., но и это возможно только при большом увеличении Iв в несколько раз.Но т.к. это увеличивает нагрев то применяют только уменьшение Ф.
 Структурная схема
Структурная схема
по ней можно соста
вить зависимость
w от Ф.
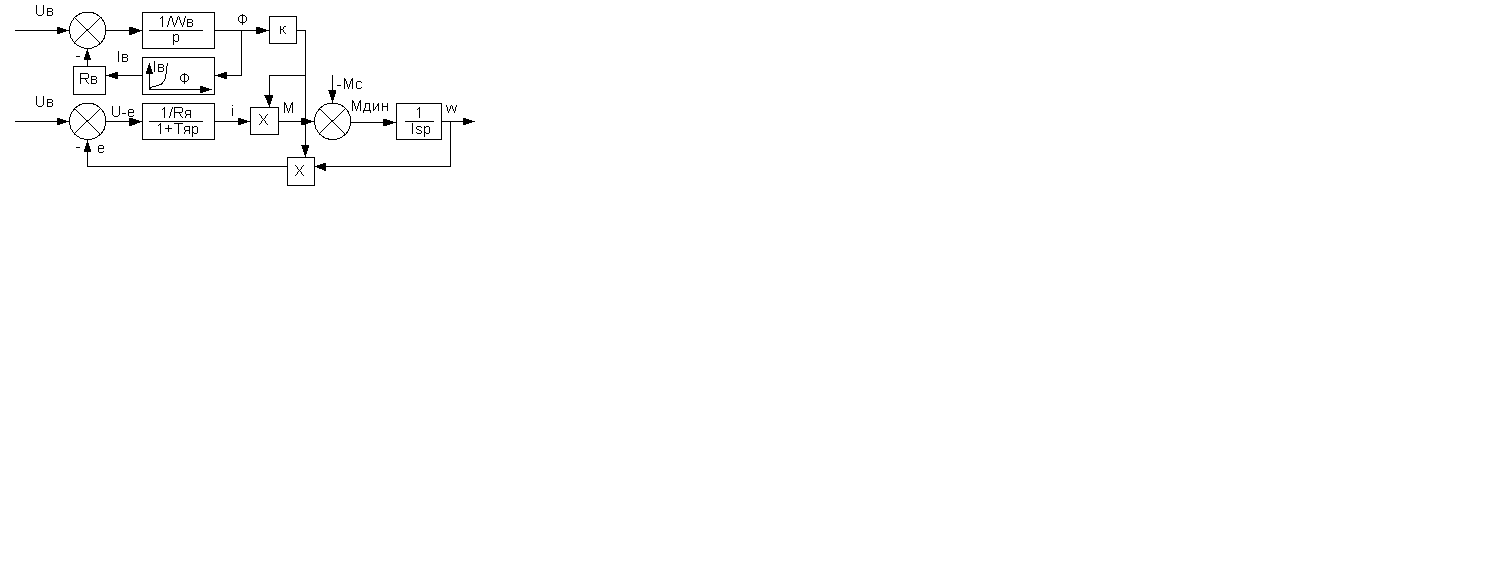
Построение характи-
Ристик:


Iкз от потока не зависит
Т.к.

Применяются точки где требуется регулирование скорости при постоянной мощности.
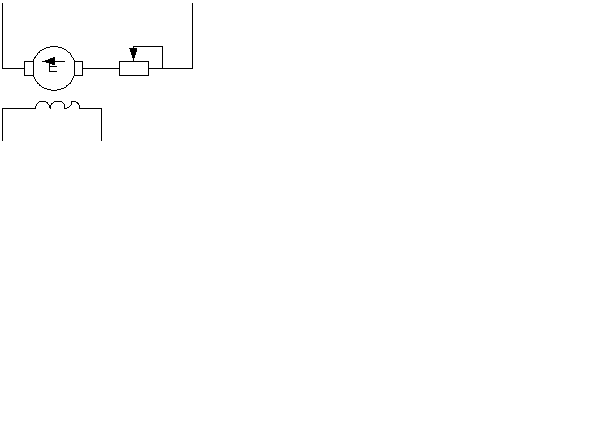
9. ВЛИЯНИЕ R ДОБ В ЯКОРНОЙ ЦЕПИ НА СВОЙСТВА ДПТ НВ. РЕАЛИЗАЦИЯ, СХЕМА, ХАР-КИ, ПРИМЕНЕНИЕ.





Rном – фиктивная вел-на удобная как баз. при отн-ой оценке. 
Или  . (в бином-х реал-х в-нах). Подставим предыдущие значения и преобразуем:
. (в бином-х реал-х в-нах). Подставим предыдущие значения и преобразуем: 
Поделим на w0 – скорость ид-го Х.Х.
Получим:
 . Введем новое обозначение:
. Введем новое обозначение:
 или (1)
или (1)  – получено ур-ние электромех-й х-ки в безразмер-х в-нах, где
– получено ур-ние электромех-й х-ки в безразмер-х в-нах, где  - относ-я скорость,
- относ-я скорость,  - отн-е U-ние (как U-ние, кот-е питает ЭД отличается от Uном),
- отн-е U-ние (как U-ние, кот-е питает ЭД отличается от Uном),  - отн-й магн-й поток,
- отн-й магн-й поток,  - отн-е сопр-е,
- отн-е сопр-е,  – отн-й ток.
– отн-й ток.
Монт:  Т.к. у ДПТ НВ Ф= const, то
Т.к. у ДПТ НВ Ф= const, то 
Если Ф не равен Фном, то  . Тогда
. Тогда  Подставив в (1) имеем6
Подставив в (1) имеем6
 - ур-ние мех-й х-ки в относ-х единицах.
- ур-ние мех-й х-ки в относ-х единицах.
 (а) Подставим в ур-нии электромех-ской х-ки:
(а) Подставим в ур-нии электромех-ской х-ки:
 или
или 
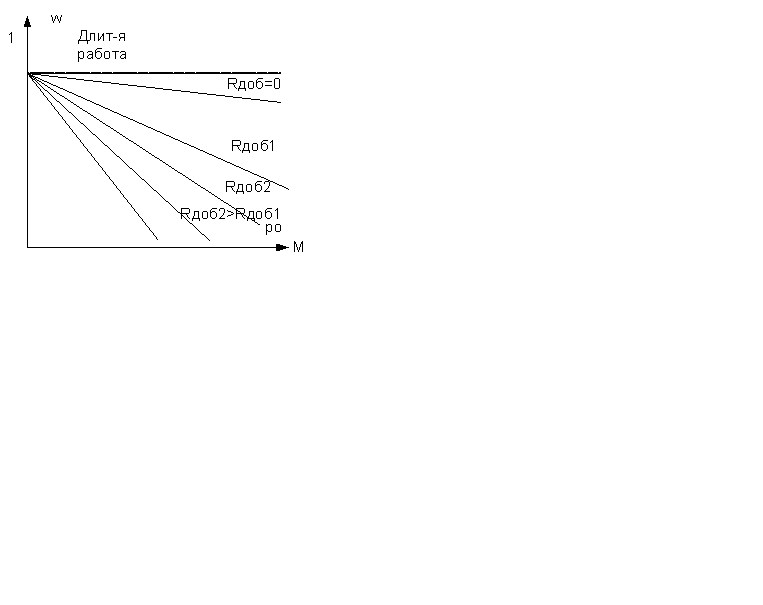 Жесткость:
Жесткость: 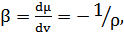 где
где  – var, Жесткость мех-ских хар-к изм-ся обратно пропорц-но сопротивлению якорной цепи.
– var, Жесткость мех-ских хар-к изм-ся обратно пропорц-но сопротивлению якорной цепи.
 (к.з.)
(к.з.)
Данные х-ки называют реостатными.
Из (а) следует, что при ном-м знач-и i,  (i=
(i=  , то
, то  . Ее наз-т скольж-м
. Ее наз-т скольж-м  . Относ-е падение скорости
. Относ-е падение скорости  наз-т сколж-м, численно равно относ-му сопротивлению якорной цепи.
наз-т сколж-м, численно равно относ-му сопротивлению якорной цепи.
10. ВЛИЯНИЕ НАПРЯЖЕНИЯ ЯКОРЯ НА СВОЙСТВА ДПТ НВ. РЕАЛИЗАЦИЯ, СХЕМА, ХАР-КИ, ПРИМЕНЕНИЕ.
Rном – фиктивная вел-на удобная как баз. при отн-ой оценке.
Или . (в бином-х реал-х в-нах). Подставим предыдущие значения и преобразуем:
Поделим на w0 – скорость ид-го Х.Х.
Получим:
. Введем новое обозначение:
или (1) – получено ур-ние электромех-й х-ки в безразмер-х в-нах, где - относ-я скорость, - отн-е U-ние (как U-ние, кот-е питает ЭД отличается от Uном), - отн-й магн-й поток, - отн-е сопр-е, – отн-й ток.
М-нт: Т.к. у ДПТ НВ Ф= const, то
Если Ф не равен Фном, то . Тогда Подставив в (1) имеем6
- ур-ние мех-й х-ки в относ-х единицах.
 - сопротивл-е якоря без реостата. Поток номин-й.
- сопротивл-е якоря без реостата. Поток номин-й.
 - электромех-я х-ка
- электромех-я х-ка
Жесткость равна:
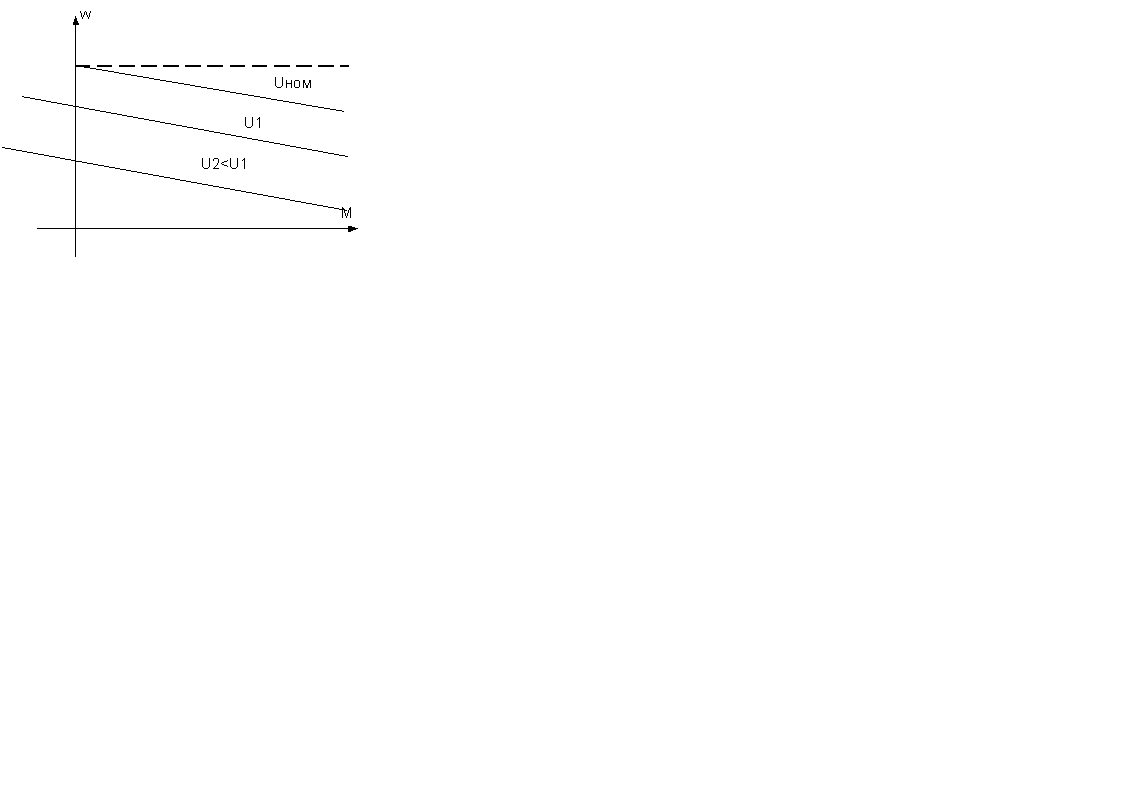
Т.о., мех-е х-ки при  ,U параллельны между собой.
,U параллельны между собой.
11. Тормозные режимы ДПТ НВ. Реализация, схема, х-ки, применение.
В ДПТ НВ можно реализовать 3 тормозных режима: 1) рекуперативное, 2) противовключением, 3) динамическое.
1) Рекуперативное возможно при  (кто-то доп-но подкручивает машину)
(кто-то доп-но подкручивает машину)  ,
, 
 – м-нт стал тормозным по отношению к направлению движению.
– м-нт стал тормозным по отношению к направлению движению.
Ур. х-ки:  .
.
Мощ-сть:  - мощ-сть потерь.(удалось мощ-сть вывести из машины. Благодаря рекуперации мощ-сть потерь относ-но невелика, что благоприятно сказывается на нагреве и => на ограничениях на нагрузке (токи). Прим-ся в подъемниках, электротранспорт, придействии акт-го м-нта сопр-я.
- мощ-сть потерь.(удалось мощ-сть вывести из машины. Благодаря рекуперации мощ-сть потерь относ-но невелика, что благоприятно сказывается на нагреве и => на ограничениях на нагрузке (токи). Прим-ся в подъемниках, электротранспорт, придействии акт-го м-нта сопр-я.
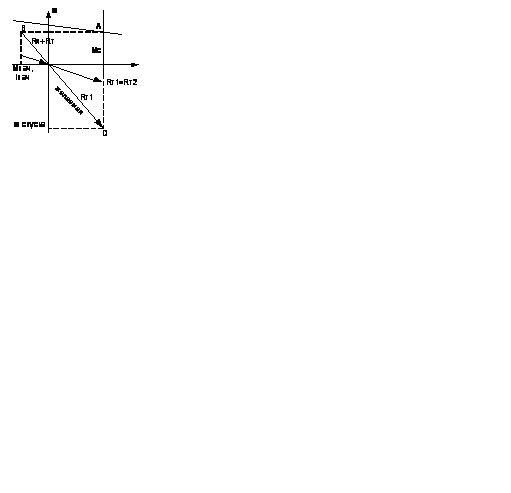
2) Торможение противовключением происх-т, когда ЭД-ль, включ-й на вращ-е в одном напр-нии, под возд-ем внешних сил (тяжести, инерции) вращается в противоп-ном направлении, т.е.:
1) w стала (-w), а м-нт (+М) – ЭД включен ан подъем, развивает положительный момент, но срабатывает сила тяжести и скорость становится отрицательной.
2) 
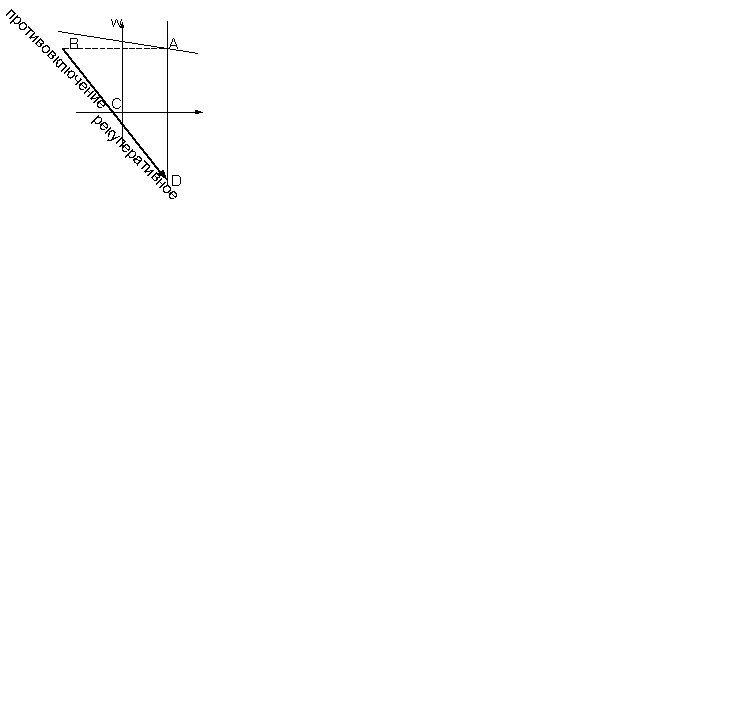 (+w), а (-М) – ЭД отключается, а механика продолжает работать (сила инерции). 2.1) Реверс. Форм-м необ-ю мех-ю х-ку путем изм-я в-ны и знака питаю-щего напр-я с добавочным Rя. Работая в т.А, переключаем поляр-сть с вкл-м Rдоб. По инер-ции ротор (+w), а м-нт (-Mэм). замедление w, в т.С изменяет напр-ние. После т.С: w<0, Cw=E и Cw<0, ток (+Iя). На эл-ской стороне U= - Е + Iя*Rя, Iя = (U+E)/Rя (ток м. достигать 40*Iном, если его не ограничивать Rдоб).
(+w), а (-М) – ЭД отключается, а механика продолжает работать (сила инерции). 2.1) Реверс. Форм-м необ-ю мех-ю х-ку путем изм-я в-ны и знака питаю-щего напр-я с добавочным Rя. Работая в т.А, переключаем поляр-сть с вкл-м Rдоб. По инер-ции ротор (+w), а м-нт (-Mэм). замедление w, в т.С изменяет напр-ние. После т.С: w<0, Cw=E и Cw<0, ток (+Iя). На эл-ской стороне U= - Е + Iя*Rя, Iя = (U+E)/Rя (ток м. достигать 40*Iном, если его не ограничивать Rдоб).
Механическая х-ка на участке противовключения:
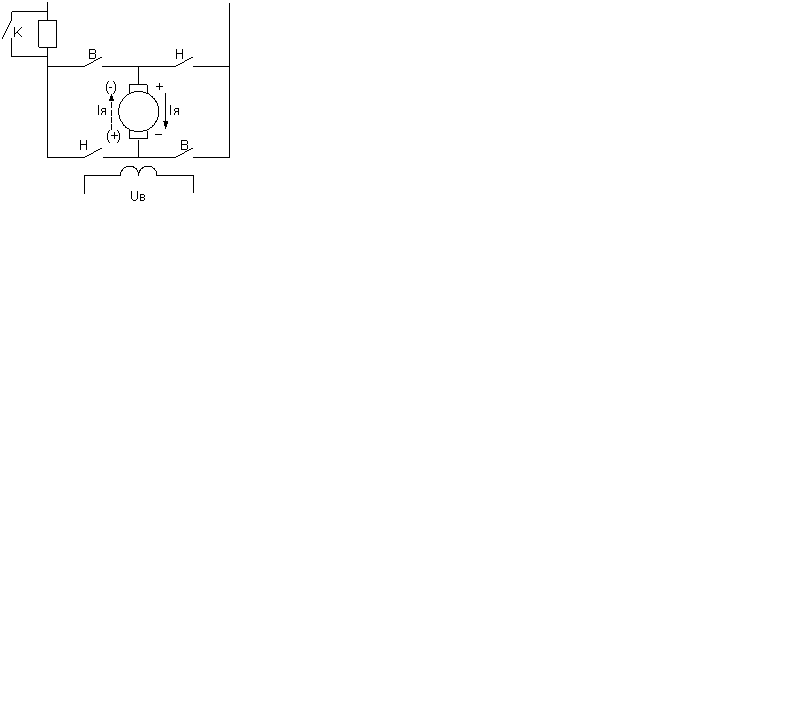
w = -w0 - (-M)/β = -w0 + M/β. ∆w = M/β >  . Уравнение равновесия на участке ВС: -U = E + Iя*Rя.Мощность ∆P = Pэл + Pмех. Реализация двух случаев реверсов на рисунке. Контакты В замкнуты, К тоже (работа вперед), если надо затормозить (ток в другом напр-и) –включаем контакты Н и Н. Скольж-е большое, токи большие→для огранич-я тока вкл. Rдоб.
. Уравнение равновесия на участке ВС: -U = E + Iя*Rя.Мощность ∆P = Pэл + Pмех. Реализация двух случаев реверсов на рисунке. Контакты В замкнуты, К тоже (работа вперед), если надо затормозить (ток в другом напр-и) –включаем контакты Н и Н. Скольж-е большое, токи большие→для огранич-я тока вкл. Rдоб.
3)  Динамическое торможение. Вращающийся якорь откл-ся от сети и замык-ся на внешнее сопр-ние, а ОВ остается вкл-ной, тогда: Iя = -E/(Rя+Rт)=-cw/(Rя+Rт).
Динамическое торможение. Вращающийся якорь откл-ся от сети и замык-ся на внешнее сопр-ние, а ОВ остается вкл-ной, тогда: Iя = -E/(Rя+Rт)=-cw/(Rя+Rт).
U=0 → w0=U/kФ= 0/kФ = 0. Ур-ние: w = w0 - Rя*Iя/kФ → w=-Rя*Iя/kФ — электромеханическая х-ка. w = -Rя*M/(kФ)^2 — мех-я х-ка. Ур-ние прямой проходит ч/з начало корд-т.
Наиб-е эффективно торм-е на высоких скоростях.
-М = β*w,
Rт=-Rя+Eнач/Iнач=-Rя + сw0/Iнач. Где Rт — тормозное сопр-е. Ур-ние равновесия:
-E = Iя*Rя, U=0, ∆P=Pэл-м. Плюсы этого торможения: простота реализации, надежность, плавность, экономность. Минусы: ↓M с ум-нием ↓w. Исчезновения Мт при отсутствии тока в ОВ.
12. ДПТ с ПВ. Устр-во, схема, особ-сти, рег-ние, прим-ние.
ОВ ДПТ ПВ распол-ся на глав-х полюсах и вкл-ся пос-но с якорем. Сеч-е провода обмотки рассчитано на бол-е токи iя. При измен-и Iя (в рез-те возмущ-й, нагрузки или упр-я) изм-ся магн-й поток, что приводит к появл-ю вихр-х токов в полюсах и станине, кот-е создают свое МП, оказ-щее влияние на магн-е состояние машины. Вихревые токи возникают при возникн-и ∆Iя (динамика). Влияние вихр-х токов учит-т вводя эквив-й коротко-замкнутый контур с числом витков wвт – дополнительная обмотка. Матем-ски описать ЭД можно системой уравнений:
 ;
;

 ;
;
 ;
;
 .
.
Схема:
У ДПТ c ПВ жесткость механической характеристики переменная величина и сильно зав-т от нагрузки (или от скорости), при w→бесконечности, β→0 (т.е. мягкие х-ки), w асимптотически приближ-ся к оси ординат, но перейти во 2 квад-ранту не может, т.к. ЭДС не может превысить, следовательно, режим рекуперативного движения у ДПТ ПВ не м.б. реализован.
Ценные особенности ДПТ ПВ: 1) с ↓w электромагнитный M↑. Напр. Подъено-транспортное уст-во, кот. работает по з-ну пост-й мощ-сти.
Искусств-е х-ки получают включ-м добавочного регулируемого сопр-ния в цепь якоря или шунтированием обмотки якоря или обмотко возбуждения. В наст. Вр для регул-я скорости исп-ся ШИМ.
Поток опр-ся результир-щим действием iя и вихр-х токов iвт по кривой намагничивания. Ф = L*I.
Твт – суммарная пост-я вр цепи возб-я, т.е. вихр-е токи ув-т инерционность. При линеаризации сист в окрест-стях точки статич-го р-ма получили выраж-е линеариз-й модели ДПТ ПВ: ∆M(p)*(1+pTэ) = βэ*[∆  (p)-∆w(p)], (2)
(p)-∆w(p)], (2)
Где  .
.  - по кривой намагнич-я,
- по кривой намагнич-я,
 – эквив-я жесткость (жест. стат. линеариз-й х-ки).
– эквив-я жесткость (жест. стат. линеариз-й х-ки).
 Тэ – эквив-я ЭМ-ная пост-я вр.
Тэ – эквив-я ЭМ-ная пост-я вр.
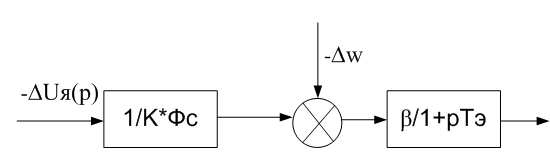 Структурная схема в соотв-е с ур-м (2):
Структурная схема в соотв-е с ур-м (2):
Ур-ния статики:

 (3)
(3)

Т.к.  , тогда .
, тогда . 
Электромех-й м-нт:  Т.о. отличит-й спос-стью ДПТ ПВ то, что м-нт пропорционален квадрату тока.
Т.о. отличит-й спос-стью ДПТ ПВ то, что м-нт пропорционален квадрату тока.
13. АД. Устр-во, разновидности, пр-п действия, схема замещ-я, уравн-я мех-й х-ки.
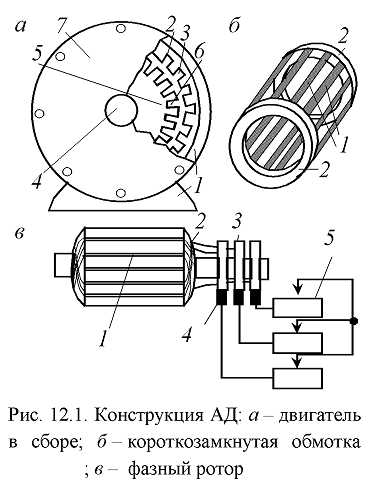 АД состоит из неподвижной части - статора и вращающегося ротора. Основными частями статора являются корпус 1 с впрессованным сердечником 2 (рис. 12.1, а). Сердечник статора собирается из тонких дисков электротехнической стали (для уменьшения потерь от вихревых токов и гистерезиса). На внутренней цилиндрической поверхности сердечника имеются пазы 3, в которые укладывают трехфазную обмотку статора, состоящую из трех фазных обмоток (на рис. 12.1, а не показана). Фазные обмотки смещены друг относительно друга на 120° и могут соединяться звездой или треугольником. Начала фаз C1, C2, С3, и их концы С4, С5, С6 выведены в коробку на статоре.
АД состоит из неподвижной части - статора и вращающегося ротора. Основными частями статора являются корпус 1 с впрессованным сердечником 2 (рис. 12.1, а). Сердечник статора собирается из тонких дисков электротехнической стали (для уменьшения потерь от вихревых токов и гистерезиса). На внутренней цилиндрической поверхности сердечника имеются пазы 3, в которые укладывают трехфазную обмотку статора, состоящую из трех фазных обмоток (на рис. 12.1, а не показана). Фазные обмотки смещены друг относительно друга на 120° и могут соединяться звездой или треугольником. Начала фаз C1, C2, С3, и их концы С4, С5, С6 выведены в коробку на статоре.
Внутри статора находится ротор, состоящий из вала 4, на который напрессован цилиндрический сердечник 5 (рис. 12.1, а). Сердечник ротора состоит из отдельных дисков стали, имеющих пазы 6, в которых располагается обмотка ротора. По типу обмотки роторы делят на: 1) короткозамкнутые; 2) фазные. Короткозамкнутая обмотка имеет конструкцию типа «беличья клетка» и состоит из находящихся в пазах ротора стержней 1, замкнутых накоротко с торцов кольцами 2 (рис. 12.1, б). Стержни и кольца выполняют из меди или алюминия. Для охлаждения АД на кольцах предусмотрены вентиляторные лопатки.
В пазах 1 фазного ротора (рис. 12.1, в) находится трехфазная обмотка 2, соединенная звездой. Ее концы припаяны к изолированным от вала контактным кольцам 3, к которым примыкают подпружиненные щетки 4. Щетки и кольца образуют электрические контакты, через которые к обмотке ротора подключается трехфазный реостат 5. Реостат 5 может быть пусковым (для ограничения пусковых токов ротора и статора и увеличения пускового момента АД), регулировочным (для изменения частоты вращения ротора) или пуско-регулировочным. С торцов корпус статора закрыт щитами 7, в центр которых впрессованы подшипники вала ротора (рис. 12.1, а).
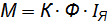
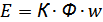
При подключении обмоток неподвижного статора к трехфазной питающей сети внутри статора образуется вращающееся магнитное поле. Поле статора пересекает проводники обмотки ротора и индуцирует в них ЭДС, под действием которой в этих проводниках появляются индукционные токи. На каждый проводник с током в магнитном поле действует сила, поэтому на валу ротора образуется вращающий момент М, приводящий ротор во вращение в направлении вращающегося поля статора. По мере разгона АД вращающий момент М изменяется до установления равновесия М = Мс, где Мс - момент сопротивления (тормозной момент), создаваемый приводимым во вращение механизмом (насос, центрифуга, вентилятор и т. д.) и силами трения. Равновесию моментов соответствует установившийся режим двигателя с постоянной частотой вращения ротора n = const.
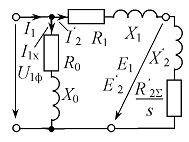
Схема замещения: R1, Х1 — сопротивление статорной цепи; R’2, X’2— приведенное к статору сопротивление роторной цепи; R0, Х0 — сопротивление ветви намагничивания, I1X — ток Х.Х .
Из схемы получаем выр-е:

m1 - кол-во фаз (в данном случае 3).  – скор. МП.
– скор. МП.
Из сх замещ-я найдем  по з-ну Ома (ветвью R0, X0 м пренебречь, т.к. ток Х.Х
по з-ну Ома (ветвью R0, X0 м пренебречь, т.к. ток Х.Х 
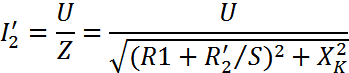

 - (1) ур-ние мех-й х-ки. Где
- (1) ур-ние мех-й х-ки. Где  Задаваясь S, м. постр S(М), выражая w ч/з S м построить w(S).
Задаваясь S, м. постр S(М), выражая w ч/з S м построить w(S).
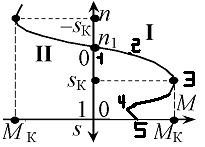
Мех-я х-ка приведена на рисунке. 1) ХХ (w0,0), 2) номин-й (wном, Мном); 3) максим-й м-нт (wmax, Mmax) – опр-т критич-ю нагрузку, 4) миним-й м-нт, 5) К.З. (пусковой). Х-ка имеет экстремум Мк, Sк для опр-я этих пар-тров берем проивод-ю dM/dS=0. Тогда:
 Подставив Sк в М=f(S), получим:
Подставив Sк в М=f(S), получим:

 - критич-я нагрузка, кот м преодолеть АД, макс-й м-нт.
- критич-я нагрузка, кот м преодолеть АД, макс-й м-нт.
Если Мс>Мк происходит опрокидывание ЭД (мен-ся знак произв-й) и остановка. Км=Мmax/Мном – перегрузочная спос-сть.