
Министерство высшего и среднего специального образования РСФСР








Ленинградский ордена Ленина и ордена Октябрьской Революции электротехнический институт имени В.И.Ульянова (Ленина)
Е. И. Росин
АВТОМАТИЗИРОВАННЫЕ ГРЕБНЫЕ ЭЛЕКТРИЧЕСКИЕ УСТАНОВКИ
ДВИЖЕНИЕ СУДНА И ЕГО ГЛАВНАЯ УСТАНОВКА
Текст лекций
Ленинград 1986
УДК 629.12-83-52(07)
Росин Е.И. Автоматизированные гребные электрические установки. Движение судна и его главная установка: Текст лекций /ЛЭТИ. -Л., 1986. -48 с.
Рассматриваются составляющие сил сопротивления, возникающие при движении надводного судна, их зависимости от различных факторов, идеальный и реальные движители, а также главные судовые установки.
Ил.29, табл.1, библиогр. - 9 назв. Рецензент : инж. В.В.Сержантов.
Утверждено редакционно-издательским советом ЛЭТИ в качестве текста лекций.
(с) Ленинградский ордена Ленина и ордена Октябрьской Революции электротехнический институт им. В. И. Ульянова (Ленина), 1986
ВВЕДЕНИЕ
Предметом изучения данного курса является использование электрической энергии в целях обеспечения движения судна. Задачи данной учебной дисциплины можно считать выполненными, если в процессе изучения будут приобретены знания по требуемым показателям работы установок, обеспечивающих движение судна, общих принципов их устройства, приемов и методов их проектирования и расчета. Для этого необходимо знание таких дисциплин, как теоретические основы электротехники, электрические машины, основы электропривода, электрические измерения, теория автоматического управления и регулирования, а также ряда разделов физики и автоматики. Разумеется, необходимо знание принципов работы различных элементов, применяемых в схемах автоматики. Они изучаются в различных курсах, предусмотренных учебным планом.
Для современного самоходного судна характерно наличие на нем двигателя, движителя и передачи. Двигатель – преобразователь какой-либо формы энергии в механическую. Движитель - устройство (механизм) для преобразования механической энергии двигателя в работу, расходуемую на преодоление сил сопротивления движению судна. Передача – устройство, передающее движущий (крутящий) момент и скорость вращения вала двигателя при необходимой трансформации на вал движителя. Такая развитая совокупность устройств называется гребной или главной установкой судна, а двигатели, входящие в ее состав - главными двигателями.
Установки, в которых главным двигателем является электродвигатель, называют гребными электрическими установками (ГЭУ). Мощность таких установок достигает десятков мегаватт на движитель, что затрудняет или делает невозможным ручное управление ими. Кроме того, управление ГЭУ осуществляется судоводителем, находящимся на значительном удалении от главных машин. Поэтому даже самая простая ГЭУ выполняется автоматизированной.
В технической литературе, наряду с термином "гребные электрические установки (ГЭУ)", встречаются также термины "электродвижение судов", "электропривод гребных винтов" и др. В настоящее время наибольшее признание получил первый.
Суда, оснащенные ГЭУ, называют электроходами. Среда них различают дизельэлектроходы и турбоэлектроходы. В последние годы появились также газотурбоэлектроходы. В этих названиях находит отра жение примененный тип главных первичных тепловых двигателей. Зачастую и в названии главной установки это обстоятельство также отражено, а именно: дизель-электрическая гребная установка (ДЭГУ), турЛ)электрическая греоная установка (ТЭГУ), гаэотурбоэлектрическая гребная установка (ПЭГ/).
История судостроения и мореплавания насчитывает не менее 60 веков. Развитие же ГЭУ фактически началось с начала XX века, хотя первым электроходом следует считать лодку, демонстрировавшуюся академиком Б.С.Якоби в 1838 г. [8]. Для демонстрации возможности практического применения предложенного им электродвигателя постоянного тока последний был установлен на лодке и приводил в движение гребные колеса. Испытания показали пригодность двигателя для движения лодки с 14 пассажирами против течения (испытания проводились на р.Нева) со скоростью около двух узлов. Питание двигателя осуществлялось от батареи гальванических элементов, энергоемкость которых мала, что являлось существенным недостатком.
Для прогресса в любой области техники, в том числе и для ГЭУ, обязательно выполнение, по крайней мере, следующих условий: а) открытие или применение какого-либо объективно существующего явления, б) наличие потребности общества в техническом решении некоторых противоречий в сфере производства, в) наличие у общества материальной базы, необходимой для осуществления технического решения. Нетрудно видеть, что в 1838 году эти условия выполнялись не все. Поэтому дальнейшее развитие ГЭУ стало возможным только с того момента, когда оказались выполненными все отмеченные выше условия.
Любопытно, что следующим электроходом, имеющим практическую значимость, стала подводная лодка. Впервые подводная лодка была построена в 1620 г. в Лондоне голландским ученым Клан Дреббелом. Затем был сделан целый ряд попыток создания подводной лодки в различных странах. Все они были обречены на провал, пока не появились электродвигатель, не требующий для своей работы кислорода, и достаточно энергоемкий источник питания для него. Только в 1880 г. инженер Двежецкий С.К. впервые применил на подводных лодках кислотные аккумуляторные батареи для работы гребного электродвигателя (ГЭД). Возобновление запаса электроэнергии аккумуляторных батарей было успешно решено К.Г.Бубновым в проекте дизель-электрической подводной лодки "Дельфин", заложенной к постройке в 1902 г.
Трудами русского инженера Доливо-Добровольского М.О. в 1891г. созданы все необходимые элементы ГЭУ переменного тока. Им разработана система трехфазного тока, изобретен двигатель трехфазного тока, впервые примененный на практике. Но, поскольку материальная база не имела еще возможности создания электрических машин необходимой мощности, развитие ГЭУ переменного тока началось лишь в конце первого десятилетия IX в.
Между тем возникла необходимость применения дизелей для движения судов, как более экономичных по сравнению с паровой машиной и парокотельной установкой. Непосредственно применить дизель было нельзя, так как он не мог изменить направление вращения для получения обратного хода судна. Проблема была решена тем, что на судне (трехвинтовая нефтеналивная баржа) "Вандал", построенном сормовским заводом в 1903 г., были установлены дизели, вращавшие генераторы постоянного тока, от каждого из которых питался электродвигатель соответствующего гребного вала. Таким образом, первый в мире теплоход одновременно был и электроходом. Суммарная мощность ГЭУ на валах первичных двигателей составляла ?65 кВт (3x120 л.с).
Потери при дополнительном двукратном преобразовании энергии от дизелей в такой установке составляли около 20%. Поэтому на построенном в следующем, 1904 году судне того же назначения "Сармат" по предложению инженере Лель-Пропосто устанавливают систему, названную его именем. На "Сармате", имевшем два гребных винта, с каждым гребным валом соединялся ГЭД, который в свою очередь соединялся с помощью разобщительной муфты с электрогенератором, приводившимся во вращение дизелем. При переднем ходе дизель работал непосредственно на гребной винт. При заднем ходе и при маневрировании на малых ходах разобщалась муфта и гребной вал приводился в движение электродвигателем, получавшим питание от дизельгенератора. Суммарная мощность ГЭУ на вадах дизелей была также 265 кВт (2x180 л.с). По этой системе в 1908 г. были построены 8 четырехвиинтовых канонерских лодок Амурской флотилии.
С появлением (1906-1908 гг.) реверсируемых дизелей развитие ДЭГУ постоянного тока затормозилось. Одновременно возник интерес к ТЭГУ переменного тока . В США был проведен эксперимент по сравнению различных гребных установок на однотипных судах - угольщиках водоизмещением около 20000 т. Сравнивались гребные установки с паровой машиной, турбозубчатым агрегатом и турбоэлектрической греб ной установкой трехфазного тока. Технико-экономические показатели постройки и эксплуатации оказались в пользу последней.
С 1916 по 1927 гг. в США было построено 118 электроходов. К 1932 г. число их возросло до 250.
В 1933 г. в Швеции был построен ледокол с ДЭГУ. Успех его эксплуатации привлек внимание стран, заинтересованных в ледоколостроении. В 1939 г. в Финляндии был построен второй в мире ледокол с ДЭГУ мощностью 3530 кВт. В СССР в это время были созданы проекты ледоколов с ГЭУ мощностью около 8800 кВт и 17600 кВт. Осуществить их помешала война.
Первые дизель-электроходы переменного тока "Вуптрталь", "Патрия" и др. были построены в Германии в 1938-1939 гг.
В период второй мировой войны практически только США и Англия строили электроходы. С 1939 по 1945 гг. ими было построено 551 транспортное судно-электроход.
После второй мировой войны круг стран, строящих электроходы, существенно расширился, и к настоящему времени в это число входят практически все, имеющие судостроительную промышленность.
В СССР после войны первый электроход отечественной постройки (танкер "Генерал Ази Асланов") вступил в отрой в 1950 г. Затем последовали серии речных ледоколов типа "Волга", речных железнодорожных паромов типа "Надым", судов общего назначения типа "Днепрогэс", китобойных судов типа "Мирный", морских буксиров типа "МБ-51", буксиров-спасателей типов "Атлант" и "Пурга", производственных рефрижераторов типа "Таврия", траулеров типов "Север" и "Алтай", транспортных рефрижераторов типов "Актюбинск" и "Сибирь", ледокольно-транспортных судов типа "Амгуэма" и др. Самыми мощными и единственными в мире остаются наши атомные ледоколы "Ленин", "Арктика" (ныне "Леонид Брежнев"), "Сибирь" и "Россия".
В целом число судов с ГЭУ в мировом флоте составляет 1,5-2%. В СССР доля этих судов около 7%. Широкое применение ГЭУ нашли на судах с тяжелыми условиями плавания (практически все ледоколы имеют ГЭУ) и на судах производственного назначения. Полвека назад началось освоение Северного морского пути. Развитие промышленности в северных районах нашей страны требует дальнейшего развития морского транспорта в Арктике. СССР уже сейчас имеет самый мощный ледокольный флот. В перспективе обеспечение круглогодичной навигации на Севере."Основные направления экономического и социального раз вития СССР на I986-I990 года и на период до 2000 года предусматривают: "На морском транспорте ... развивать ледокольный и ледокольно-транспсртный флот"; "На речном транспорте ... продлить период гарантированной навигации на магистральных реках".
1. СОПРОТИВЛЕНИЕ ДВИЖЕНИЮ СУДНА
1.1. Силы, действующие на судно
Движение надводного судна происходит в приграничном слое двух сред – водной и воздушной. Для ориентации движения необходимо выбрать систему координат. Её удобно выбрать связанной с судном (рис.1.1). Начало координат 0 обычно располагают в центре тяжести "m", но для рассмотрения интересующих нас вопросов такое совмещение не обязательно. За продольную ось "ox" примем линию пересечения диаметральной плоскости с плоскостью ватерлинии. 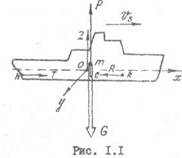 Поперечную ось " оу " расположим в плоскости ватерлинии перпендикулярно оси "ox". За вертикальную ось "oz" считаем линию, лежащую в диаметральной плоскости и перпендикулярную продольной оси. За положительное направление оси "ox" считаем направление в нос. Что касается осей "oy " и "oz", то их направления могут быть различными.
Поперечную ось " оу " расположим в плоскости ватерлинии перпендикулярно оси "ox". За вертикальную ось "oz" считаем линию, лежащую в диаметральной плоскости и перпендикулярную продольной оси. За положительное направление оси "ox" считаем направление в нос. Что касается осей "oy " и "oz", то их направления могут быть различными.
Из всех возможных движений нас будет интересовать только поступательное движение по продольной оси. Пусть судно движется равномерно со скорсстью Vs . Для простоты пренебрежем взаимодействием судна с воздушной средой. При движении судна образуется система сил. Со стороны водной среды на судно будет действовать: а) результирующая поддерживающая сила Р (сила Архимеда для водоизмещающего судна), приложенная к центру величины "с", и б) результирующая сила сопротивления движению судна R , приложенная к некоторой точке "k". Со стороны судна на водную среду будут действовать: а) масса судна G , результирующая которой приложена к центру тяжести "m", и б) сила упора Т или просто упор, приложенный к некоторой точке "h". Точки "с","k","m" и "h" находятся на диаметральной плоскости вследствие симметрии судна относительно последней. При выполнении равенства P=G судно плавает на поверхности воды, а при T=R , кроме того, равномерно движется со скоростью Vs в продольном направлении. Если точки "m" и "c " не находятся на одной вертикали, возникает дифферент судна на нос или корму. Аналогичное явление наблюдается, если точки "k" и "h" находятся не на одной прямой, параллельной продольной оси.
Очевидно, что учет взаимодействия судна с воздушной средой потребует добавления к R дополнительной составляющей Ra.
1.2. Сила сопротивления движению и ее составляющие
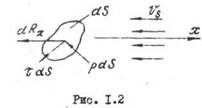
При движении судна все части его поверхности, соприкасающиеся с водой, испытывают определенные силовые воздействия с ее стороны. Эти воздействия называют поверхностными силами [5] . Они слагаются из сил давления, нормальных к участкам смоченной поверхности, и касательных cил, распределенных по поверхности.
Выделим элементарный участок смоченной поверхности судна dS (рис.1.2). Вследствие движения судна на этот участок набегает поток воды со скоростью, равной скорости движения судна Vs в направлении, противоположном продольной оси х . Элементарная сила dRx , препятствующая движению участка dS в направлении оси "ox", определится как сумма проекций касательной силы tdS и нормальной силы pdS на эту ось. Здесь t – касательное напряженна и p - нормальное давление в данной точке участка поверхности dS . Значение dRx будет
 (1.1)
(1.1)
Сила сопротивления движению судна со стороны гидравлической среды Rг определяется при интегрировании выражения 1.1
 (1.2)
(1.2)
Из (1.2) можно выделить две составляющие

где
 ;
; 
Величину Rf называют сопротивлением трения, a Rp - сопротивлением давлений. Сопротивление Rf возникает вследствие вязкости жидкости, действие которой учитывается лишь в пределах пограничного слоя.
Сопротивление давлений R p может быть представлено в виде суммы двух слагаемых
Rp=Re+Rw
 где Re - сопротивление формы, или вихревое, а Rw - волновое.
где Re - сопротивление формы, или вихревое, а Rw - волновое.
Сопротивление Re возникает вследствие вызванного вязкостью жидкости перераспределения давлений по поверхности тела. В вязкой жидкости наличие пограничного слоя приводит к отклонению струй жидкости от поверхности тела, так как по мере приближения к корме толщина пограничного слоя возрастает, и зона влияния вязкости расширяется. Этим и объясняется изменение распределения гидродинамических давлений по смоченной поверхности. Поэтому, если взять результирующую проекций сил давления на направление потока, обтекающего судно, ее значение не равно нулю и, следовательно, судно будет испытывать сопротивление формы Re .
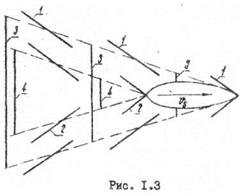
При движении судна на спокойной поверхности вода образуется система корабельных волн, вызванных этим движением. Их физической причиной является свойство весомости жидкости, так как частицы жидкости, выведенные из равновесного положения движущимся судном, будут совершать колебания под действием силы тяжести. На рис.1.3 представлена система корабельных волн (показаны их гребни): 1 - носовые расходящиеся, 2 -кормовые расходящиеся, 3 - носовые поперечные, 4 - кормовые поперечные. На создание этих волн со стороны судна расходуется энергии, что эквивалентно расходованию ее на преодоление некоторой силы сопротивления. Это фиктивное сопротивление и называют волновым сопротивлением Rw .
Для надводного судна необходимо также учесть аэродинамическое сопротивление Rа, вызываемое взаимодействием надводной части корпуса с воздушной средой. В нем также можно выделить две составляющих - сопротивление трения и сопротивление формы.
Сила сопротивления зависит от многих факторов и не поддается точному анализу. Она зависит от скорости движения судна, его основных размеров и формы, шероховатости обшивки, вязкости и плотности воды, состояния моря и ряда других величин.
Общий вид формулы для сил сопротивления будет
 (1.3)
(1.3)
где  - безразмерный коэффициент полного гидродинамического сопротивления судна,
- безразмерный коэффициент полного гидродинамического сопротивления судна,  - плотность среды, S - сличенная поверхность судна. Коэффициент данного судна является функцией основных критериев подобия - чисел Рейнольдса
- плотность среды, S - сличенная поверхность судна. Коэффициент данного судна является функцией основных критериев подобия - чисел Рейнольдса  и Фруда
и Фруда  , где L – длина ватерлинии судна,
, где L – длина ватерлинии судна,  - кинематический коэффициент вязкости и g – ускорение силы тяжести.
- кинематический коэффициент вязкости и g – ускорение силы тяжести.
Аналогично (1.3) для вычисления составляющих сопротивления использует формулы

Здесь  - коэффициенты сопротивления соответственно трения, формы и волнового, причем
- коэффициенты сопротивления соответственно трения, формы и волнового, причем

Коэффициенты трения и формы являются функциями от числа R e, а коэффициент волнового сопротивления - функцией от числа Fr.
Для определения коэффициента сопротивления используют результаты испытаний моделей в опытовых бассейнах.
Аэродинамическое сопротивление можно выразить также формулой, аналогичной (1.3). Коэффициент аэродинамического сопротивления будет являться функцией числа Re . Число Фруда характеризует относительную быстроходность судов: чем больше Fr , тем более быстроходным считается судно. В зависимости от числа Фруда водоизмещающие суда принято разделять на группы: а) сравнительно тихоходные, которые плавают при относительных скоростях, Fr<0,2; б) средней быстроходности, для которых 0,2 <Fr< 0,35; в) сравнительно быстроходные, при 0,35 < Fr < 0,5. Ниже приведены значения каждой составляющей в % полной силы сопротивления от значения Fr.
Значения составляющих силы сопротивления
| Fr | 0,2 | 0,2 – 0,35 | 0,35 |
| Rf | 70 – 75 | 45 – 50 | 25 – 35 |
| Re | 5 – 10 | 10 – 15 | 15 – 25 |
| Rw | 5 – 10 | 25 – 30 | 35 – 50 и выше |
| Ra | 1 – 2 | 1,5 – 2,5 | 2 – 3 |
При движении судна с Fr>0,5 характерным является появление гидродинамической силы поддержания, помимо Архимедовой силы. Поэтому режим движения судна будет не режимом плавания, а переходным режимом. При дальнейшем повышении скорости движения гидродинамическая сила поддержания будет возрастать, судно будет выходить из воды, уменьшая Архимедову силу и длину ватерлинии. Когда сила Архимеда станет незначительной, наступит режим глиссирования.
Для переходного режима и режима глиссирования длина ватерлинии существенно меняется с изменением скорости. Поэтому при таких режимах движения в качестве линейного размера, входящего в выражение числа Фруда, принимается кубический корень из объемного водоизмещения V в состоянии покоя судна, т.е.

Различным режимам движения судна соответствуют значения числа Fr, рассчитанные по этой формуле и лежащие примерно в следующих пределах: режим плавания - 0<Fr<1; переходный режим - I<Fr<3; режим глиссирования - Fr>3. Исходя из рассмотренного в данном параграфе, можно записать

для спокойной поверхности моря и отсутствия ветра.
Поскольку такие условия плавания встречаются крайне редко, на практике возникают дополнительно составляющие силы сопротивления  , где
, где  - сопротивление, обусловленное воздействием волн на корпус судна,
- сопротивление, обусловленное воздействием волн на корпус судна,  - сопротивление вследствие ветрового поверхностного течения воды,
- сопротивление вследствие ветрового поверхностного течения воды,  - сопротивление воздуха из-за наличия ветра.
- сопротивление воздуха из-за наличия ветра.
Общая сила сопротивления при ветро—волновых условиях плавания будет больше значения Rx на величину ΔR.
Мощность, необходимую для преодоления силы сопротивления судном, движущимся с установившейся скоростью Vs , называют полезной или буксировочной мощностью P δ [8].
2. СУДОВОЙ ДВИЖИТЕЛЬ
2.1. Общие положения
Прямолинейное равномерное движение судна происходит под действием движущей силы Т, уравновешивающей силу сопротивления Rx, следовательно, сила T должна быть равна силе Rx по величине и направлена в противоположную ей сторону.
Для создания и поддержания движущей силы T на судне устанавливают специальное устройство, которое носит название движителя. Как правило, движитель является механическим. Поэтому на судне располагают также источники механической энергии, которую движитель преобразует в энергию поступательного движения судна. Часть ее при разгоне судна запасается в виде кинетической энергии, а другая часть расходуется на работу по преодолению силы сопротивления. Как было отмечено ранее, при установившемся движении судна эта работа характеризуется буксировочной мощностью, буксировочная мощность P δ обеспечивается движителем. Она меньше мощности PT , подводимой к движителю. Отношение  называют пропульсивным коэффициентом или КПД комплекса движитель - корпус судна.
называют пропульсивным коэффициентом или КПД комплекса движитель - корпус судна.
Движитель расположен вне судна в непосредственной близости от его корпуса. Форма корпуса, влияя на картину обтекания движителя потоком воды, может ухудшать, а иногда и улучшать условия работы движителя, снижая или повышая его эффективность, что учитывается коэффициентом влияния корпуса ηк. Потери мощности в самом движителе учитываются его КПД – ηв. Таким образом,  , где
, где  ,а ηк может быть как меньше, так и больше единицы.
,а ηк может быть как меньше, так и больше единицы.
Мощность PT, подведенная к движителю, всегда меньше мощности на валу главного двигателя Pе, на величину потерь в линии валопровода (в сальниковых уплотнениях дейдвута, в опорных и упорном подшипниках), что учитывается через КПД валоаровода – ηвп, а также в передаче (зубчатой, электрической и др.), если она имеется, через КПД передачи - ηпер.
Следовательно, PT=Peηвпηпер, или

Движители судов во принципу действия являются реактивными. Их движущая сила создается за счет отбрасывания с ускорением в сторону, противоположную направлению движения судна, масс жидкости или газа, захватываемых движителем из окружающей среды. Отбрасывание жидкости или газа осуществляется специально сконструированннми рабочими элементами, воспринимающими силу реакции отброшенных масс. Составляющая реактивной силы, совпадающая с направлением движения судна, называется силой упора или упором движителя.
Силы, возникающие на лопастях движителя обусловливаются сопротивлением лопастей движению их в жидкости (газе) и их подъемной силой. У большинства движителей основная часть силы упора создается за счет подъемной силы на лопастных элементах.
2.2. Идеальный движитель
Допустим, что массы жидкости, захватываемые движителем, отбрасываются в виде струи, в которой на достаточном удалении от движителя наблюдаются лишь скорости, противоположные направлению движения судна и равномерно распределенные по сечению струи. Если пренебречь потерями, обусловленными вязкостью, можно получить гидродинамическую схему, позволяющую вывести простые зависимости, характеризующие работу движителя. Такую схему называют схемой идеального движителя (рис.2.1). Теория идеального движителя основана на следующих допущениях: 1) жидкость идеальна, несжимаема, безгранична, течение в системе координат, связанной с движителем, стационарное; 2) размеры движителя в осевом направлении равны нулю, а сечение потока в движителе, называемое рабочим, или гидравлическим, принимается равным габариту рабочих деталей движителя в направлении, поперечном к направлению движения; 3) струя движителя далеко за ним имеет цилиндрическую форму, а давление там такое же, как и далеко перед ним [2,9].
Введем следующие обозначения (рис.2.1);
р0, Vs - давление и скорость потока на достаточном удалении перед движителем;
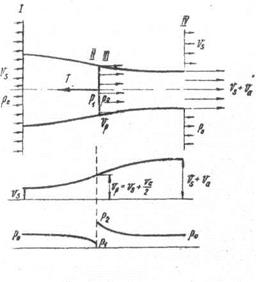
Vρ- скорость протекания жидкости через рабочее сечение;
Va- вызванная скорость на достаточном удалении за движителем;
ρ1,ρ2 - давление непосредственно перед движителем и за ним;
Sp- гидравлическое сечение движителя;
I и IV - cечения потока на достаточном удалении перед и за движителем соответственно;
II и III - сечения потока, совпадающие с передней и задней пo отношению к направлению движения судна, поверхностями лопастного движителя.
Поскольку размеры движителя в аксиальном направлении приняты равными нулю, эти сечения совпадают с рабочим сечением.
Применим уравнение Бернулли сначала к участку линии тока от сечения I до сечения II

Аналогично для второго участка от сечения III до сечения IV

Уравнение Бернулли нельзя применить ко всей линии тока, поскольку в плоскости рабочего сечения подводится энергия, обусловливающая скачок давления и изменение постоянной Бернулли. Из (2.2) и (2.3) имеем соответственно

|
|

Скачок давления в плоскости рабочего сечения будет
Упор, действующий на элемент dSp площади рабочего сечения движителя, запишется в виде
|
|

а упор движителя в целом

Применим теперь для определения упора закон количества движения. Пусть dm – масса жидкости, протекающая за единицу времени через сечение dS p. Тогда dT=dmVa. Величина dm= ρ VpdS p, следовательно, dT=ρV pVadS p и
 (2.5)
(2.5)
Приравнивая правые части (2.4) и (2.5) имеем
Vp = Vs+ Va /2
откуда следует, что аксиальная вызванная скорость в рабочем сечении идеального движителя равна половине вызванной скорости на достаточном удалении за ним.
Полезная мощность, развиваемая движителем при установившемся движении Pб= TVs, так как Rx=T . Затрачиваемая идеальным движителем мощность РТ больше Рб, поскольку часть ее расходуется на ускорение отбрасываемых масс воды. Масса жидкости dm приобретает дополнительную скорость Vа, и, следовательно, кинетическую энергию

Всей массе жидкости, проходящей через рабочее сечение идеального движителя, сообщается кинетическая энергия

КПД идеального движителя будет
Из (2.4) и (2.6) следует, что чем выше вызванная скорость Va , тем больше сила упора и тем меньше КПД движителя.
2.3. Реальные движители
Судовые движители подразделяют на лопастные и водометные. У лопастных сила реакции воспринимается подвижными рабочими элементами, передается на упорный подшипник, а через него и на корпус судна. У водометных движителей значительная часть рекции отбрасываемых масс, а в некоторых конструкциях и вся, воспринимается неподвижными элементами и через них передается на корпус судна.
Между собой лопастные движители отличаются расположением оси вращения относительно осей судна, а также формой, расположением и числом лопастей. К лопастным движителям относятся: а) гребное колесо, б) гребной винт, в)крыльчатый движитель и г)воздушный винт. Наиболее распространенным движителем в настоящее время является гребней винт. Поэтому целесообразно остановиться на нем более подробно, выделив этот вопрос в отдельный параграф. А теперь кратко остановимся на менее распространенных.
Гребное колесо. Этот тип движителя является частично погруженным и располагается, как правило, по бортам судна. Имеет ось вращения, параллельную поперечной оси судна. Известны две конструктивные схемы гребных колес: с неподвижными (рис.2.2а) и поворотными (рис.2.26) плицами (лопастями).
На плицы работающего колеса (рис.2.2а) набегает поток, скорость которого V0, является геометрической суммой скорости ωr, обусловленной вращением колеса, и скорости V3, поступательного движения судна. В результате обтекания плиц потоком на них развиваются гидродинамические силы R, примерно перпендикулярные поверхности плиц. Приложив к оси вращения две противоположные силы R1 и R2, равные и параллельные силе R, получим пару сил R и R2, момент которой преодолевается двигателем. Проекция силы R1, на направление движения даст силу упора Т.
При работе гребного колеса с неподвижными плицами возникают значительные потери энергии при входе плицы в воду и выходе ее из воды. С целью уменьшения потерь применяют колеса с поворотными плицами. Их снабжают эксцентриковым механизмом, обеспечивающим поворот плиц и уменьшение углов входа их в воду и выхода из воды. В итоге КПД колес повышается (0,5 - 0,6), однако их устройство усложняется, а масса увеличивается.
Схема колеса с поворотными плицами показана на рис.2.2б. Каждая плица шарнирно укреплена на оси А.
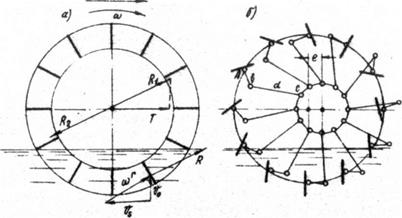
Рис. 2.2
К задней стороне плицы жестко прикреплен рычаг "b" (костыль), соединенный шарниром с тягой "d". Другой конец тяги "d" соединен с шарниром "с" эксцентрика, ось которого отстоит от оси колеса на расстоянии "e". Кинематика движения плицы ясна из рисунка.
Гребные колеса были первыми механическими движителями. В настоящее время они находят применение на мелкосидящих речных буксирах и грузопассажирских судах. Эти движители имеет большой упор, низкую частоту вращения (0,3 - 0,5 с-1) и плохие массо-габаритные показатели. Суда с такими движителями очень рыскливы при качке, в связи с чем от использования их на открытых водных пространствах отказались.
Крыльчатый движитель. Этот тал движителя с осью вращения, параллельной или почти параллельной вертикальной оси судна располагается в кормовой части днища судна. Представляет собой барабан, ось которого является осью вращения движителя. Барабан устанавливается так, чтобы его нижняя поверхность располагалась заподлицо с днищевой частью судна. По окружности барабана на равных угловых расстояниях расположены 4-7 лопастей, которые могут совершать колебательные движения вокруг своих осей. Форма лопасти в
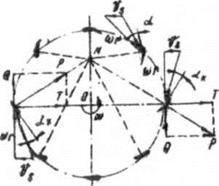
Рис. 2.3
плане напоминает форму самолетного крыла. Профиль поперечного сечения лопасти крылообразный, симметричный относительно дуги окружности барабана с закруглённой передней кромкой. Все элементы кинематической схемы, приводящей в действие лопасти движителя, размещаются внутри корпуса судна. За один оборот диска каждая лопасть совершит одно полное колебание. Кинематическая схема движителя представлена на рис.2.3. Угол поворота лопастей изменяется с помощью механизма, расположенного внутри корпуса движителя и устроенного так, что центр управления N может быть установлен в любой точке внутри окружности. Как видно из рисунка, лопасти поворачиваются так, что перпендикуляры и их хордам пересекаются в точке N. Результирующая скорость потока, набегающего на лопасть, складываемся на вектора скорости, V3 счет поступательного движения судна и вектора ωr за счет вращения движители и образует с хордой лопасти угол атаки αк. При этом на лопасти возникает подъемная сила Р. Проекция ее на направление движения дает упор Т. Проекция на касательную к окружности Q образует момент, преодолеваемый двигателем. Сила упора является функцией длины отрезка ON, а направление - перпендикулярно ему. Перемещая центр управления в ту или иную точку окружности, можно изменить упор от нулевого до максимального значения по величине и от 0° до 360° по направлению.
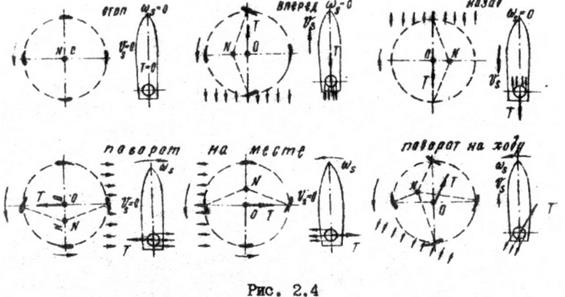
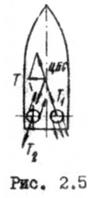
Эта возможность иллюстрируется рис.2.4. Применение этого движителя не требует рулевого устройства и изменения частоты вращения двигателя. Судно, имеющее два крыльчатых движителя (рис.2.5) может двигаться лагом. Для этого упоры движителей Т1 и Т2 направляют так, чтобы направление их действия проходило через точку ЦБС (проекция центра бокового сопротивления на продольную ось). Результирующий упор в этом случае будет направлен перпендикулярно продольной оси судна. Такие движители целесообразно применять на судах с высокой маневренностью. Они эксплуатируются на буксирах, плавучих кранах и других судах технического флота.
 Водометный движитель. Он состоит из водопроточных каналов, внутри которых расположен насос того или иного типа. Насос засасывает воду черва водозаборное отверстие и выбрасывает ее через выходное сопло (рис.2.6 .где 1,2- первая и вторая ступени насоса (а,б - винт и контрпропеллер), 3 - водометная труба, 4 - выходное сопло, 5 - водозаборный). Реакция струи, выбрасываемой в сторону, противоположную движению, и является силой, движущей судно. Выброс струи может производиться в атмосферу, под воду или быть полуподводным. В качестве рабочего органа применяют осевые пропеллеры либо центробежные насосы.
Водометный движитель. Он состоит из водопроточных каналов, внутри которых расположен насос того или иного типа. Насос засасывает воду черва водозаборное отверстие и выбрасывает ее через выходное сопло (рис.2.6 .где 1,2- первая и вторая ступени насоса (а,б - винт и контрпропеллер), 3 - водометная труба, 4 - выходное сопло, 5 - водозаборный). Реакция струи, выбрасываемой в сторону, противоположную движению, и является силой, движущей судно. Выброс струи может производиться в атмосферу, под воду или быть полуподводным. В качестве рабочего органа применяют осевые пропеллеры либо центробежные насосы.
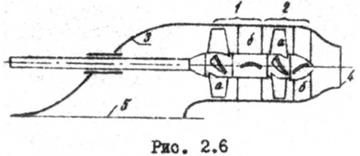 Часто водометные движители оборудуются устройствами для поворота отбрасываемой струи, а также специальными заслонками, обеспечивающими ее реверс. Последние позволяют изменять направление движения судна (с переднего хода на задний) при неизменном направлении вращения главного двигателя.
Часто водометные движители оборудуются устройствами для поворота отбрасываемой струи, а также специальными заслонками, обеспечивающими ее реверс. Последние позволяют изменять направление движения судна (с переднего хода на задний) при неизменном направлении вращения главного двигателя.
По КПД водометные движители на умеренных скоростях движения уступают гребным винтам. Применяются на судах, плавающих в условиях мелководья и загрязненной акватории, когда малая осадка и лучшая защищенность рабочего органа играют определяющую роль. При больших скоростях движения эффективность водометных движителей оказывается близкой к эффективности гребных винтов. Поскольку их применение обеспечивает ряд конструктивных и эксплуатационных преимуществ, в последние годы они стали применяться на судах с подводными крыльями я скеговых судах на воздушной подушке.
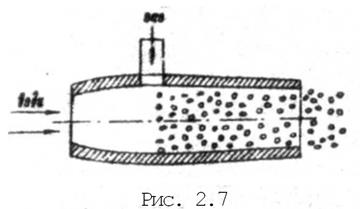 Разгон воды в проточной части водометного движителя можно осуществлять не только с помощью насоса. Водометные движители, не имеющие насосного рабочего органа, часто называют гидрореактивными. Такое название не является точным, поскольку все движители по своему принципу действия являются гидрорекактивными. Схемы движителей без насосного рабочего органа весьма разнообразны. Их можно подразделить на две основные группы: прямоточные и пульсирующие. Прямоточный движитель (рис.2.7) состоит из трубы переменного сечения, в которую поступает вода и подается газ под давлением. Образующаяся в трубе двухфазная смесь выбрасывается в сторону, противоположную движению судна. Прямоточный движитель создает тягу при движении, а начать движение с его помощью нельзя.
Разгон воды в проточной части водометного движителя можно осуществлять не только с помощью насоса. Водометные движители, не имеющие насосного рабочего органа, часто называют гидрореактивными. Такое название не является точным, поскольку все движители по своему принципу действия являются гидрорекактивными. Схемы движителей без насосного рабочего органа весьма разнообразны. Их можно подразделить на две основные группы: прямоточные и пульсирующие. Прямоточный движитель (рис.2.7) состоит из трубы переменного сечения, в которую поступает вода и подается газ под давлением. Образующаяся в трубе двухфазная смесь выбрасывается в сторону, противоположную движению судна. Прямоточный движитель создает тягу при движении, а начать движение с его помощью нельзя.
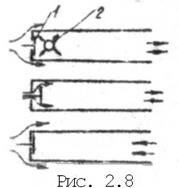
Пульсирующие движители (рис.2.8) лишены этого недостатка. Наличие клапана 1, позволяющего периодически перекрывать водоприемный канал, обеспечивает получение тяги и при отсутствии движения. Но такой движитель создает упор лишь при закрытом клапане, когда в трубу 2 подается газ. Поэтому его КПД ниже, чем у прямоточного движителя.
2.4. Гребной винт
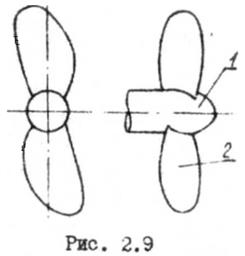 Это наиболее распространенный тип движителя. Он применяется на судах всех типов, отягчается простотой конструкции, надежностью в эксплуатации, высоким КПД (0,7 - 0,75) и относительно малой массой. Осью вращения его является гребной вал, параллельный оси судна или имеющий небольшой наклон к ней. Один из его концов, выходящий за пределы корпуса судна, заканчивается ступицей (рис.2.9 ,1 - ступица, 2 - лопасть), которая имеет ряд лопастей (от 2-х до 8-и), установленных радиально на одинаковом угловом расстоянии друг от друга.
Это наиболее распространенный тип движителя. Он применяется на судах всех типов, отягчается простотой конструкции, надежностью в эксплуатации, высоким КПД (0,7 - 0,75) и относительно малой массой. Осью вращения его является гребной вал, параллельный оси судна или имеющий небольшой наклон к ней. Один из его концов, выходящий за пределы корпуса судна, заканчивается ступицей (рис.2.9 ,1 - ступица, 2 - лопасть), которая имеет ряд лопастей (от 2-х до 8-и), установленных радиально на одинаковом угловом расстоянии друг от друга.
Гребные винты располагаются в кормовой оконечности судна. Лишь на некоторых тинах судов (паромы, ледоколы) могут дополнительно устанавливаться носовые винты. Обычно суда оборудуются либо одним винтом в диаметральной плоскости, либо двумя, расположенными симметрично по бортам. Реже встречаются трех- и четырехвивтовые суда.
Как правило, на каждом гребном валу устанавливают один гребной винт. Однако, в целях повышения КПД иногда применяют два соосных винта, вращающихся в противоположные стороны. В этом случае внутри полого вала размещает второй вал и один из винтов приводится во вращение наружным валом, а другой - внутренним. Подобные гребные винты называют "парными". Еще реже используют конструкцию с двумя винтами,
вращающимися в одну сторону; такие винты принято называть винтами "тандем".
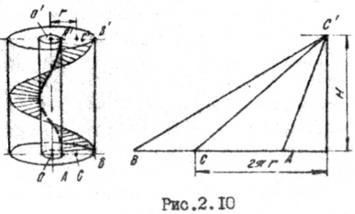 Особенности геометрии и конструкции гребного винта. Возьмем отрезок ОВ (рис. 2.10) и будем его вращать вокруг 00΄. Одновременно будем его перемещать поступательно вдоль оси 00΄.Отрезок АВ при этом описывает винтовую поверхность и носит название образующей этой поверхности. При равномерных поступательном и вращательном движениях образующей любой формы и произвольном угле наклона к оси получается винтовая поверхность постоянного шага. Если эту поверхность пересечь несколькими соосными цилиндрами, получим соответствующее число винтовых линий постоянного геометрического шага. Одну из таких линий опишет точка С образующей АВ, лежащая на радиусе r. Развернув винтовые линии постоянного шага на плоскость, получим для каждого сечены шаговый треугольник, катетами которого служат шаг винтовой линии Н и развертка основания соосного цилиндра 2π r. Угол наклона винтовой линии, образующей гипотенузу треугольника, назначают шаговым углом, который определяется соотношением tgν = H/2π r. Винтовая поверхность постоянного шага называется правильной, если ее образующая прямолинейна и перпендикулярна оси вращения.
Особенности геометрии и конструкции гребного винта. Возьмем отрезок ОВ (рис. 2.10) и будем его вращать вокруг 00΄. Одновременно будем его перемещать поступательно вдоль оси 00΄.Отрезок АВ при этом описывает винтовую поверхность и носит название образующей этой поверхности. При равномерных поступательном и вращательном движениях образующей любой формы и произвольном угле наклона к оси получается винтовая поверхность постоянного шага. Если эту поверхность пересечь несколькими соосными цилиндрами, получим соответствующее число винтовых линий постоянного геометрического шага. Одну из таких линий опишет точка С образующей АВ, лежащая на радиусе r. Развернув винтовые линии постоянного шага на плоскость, получим для каждого сечены шаговый треугольник, катетами которого служат шаг винтовой линии Н и развертка основания соосного цилиндра 2π r. Угол наклона винтовой линии, образующей гипотенузу треугольника, назначают шаговым углом, который определяется соотношением tgν = H/2π r. Винтовая поверхность постоянного шага называется правильной, если ее образующая прямолинейна и перпендикулярна оси вращения.
Лопасти гребного винта представляют собой тела, образованные винтовыми поверхностями. Поверхность лопасти винта, обращенную в корму судна при движении его передним ходом, называют нагнетающей поверхностью. На ней возникает повышенное давление. Поверхность лопасти, на которой создается пониженное давление, называется засасывающей, эта поверхность обращена в нос судна. При движении задним ходом засасывающая и нагнетающая поверхности меняются местами. У винтов наиболее простой геометрии нагнетающая поверхность представляет собой винтовую поверхность постоянного шага. Засасывающая поверхность всегда образуется неправильной винтовой поверхностью, шаг которой изменяется и по радиусу, и вдоль оси.
Линия пересечения нагнетающей и засасывающей поверхностей образует контур лопасти. Наиболее удаленная от оси вращения точка контура лопасти называется концом лопасти. Расстояние от конца до оси вращения представляет собой радиус винта R. Площадь круга, ометаемого лопастями винта при его вращении, рассматривают как гидравлическое сечение гребного винта.
Область примыкания лопасти к ступице называют корнем лопасти, а расстояние от корня лопасти до ее конца, измеренное по радиусу, - длиной лопасти l=R-r o (r o - радиус ступицы). Кромка лопасти, встречающая поток воды при движении судна передним ходом, называется входящей, а противоположная - выходящей. В зависимости от направления вращения образующей винты могут быть левого и правого вращения.
Контур спрямленной поверхности лопасти может иметь различный характер (рис.2.11). Если рассечь лопасть соосным с винтом цилиндром и полученное сечение развернуть на плоскость, то образуется профиль сечения лопасти на данном радиусе. На рис. 2.11 представлены типичные формы контуров спрямленных поверхностей лопастей и их профили: I - симметричный (эллиптический), 2 - несимметричный (саблевидный), 3 - ледокольный, 4 - усеченный, а) - симметричный авиационный, б) - несимметричный авиационный, в) – двояковыпуклый сегментный, г) - выпукло-вогнутый, д) - сегментный, е) - ледокольный, ж) - клиновой. В зависимости от типа гребного винта и его назначения профили могут быть различной формы. Их можно подразделить на три группы профилей - сегментные, авиационные и клиновые.
Для посадки винта на гребной вал в ступице имеется конусное отверстие с пазами для одной или нескольких шпонок.
Для изготовления гребных винтов широко используются бронзы и латуни, отличающиеся высокими механическими характеристиками и коррозийной стойкостью. На быстроходных судах иногда устанавливают гребные винты из титана. Нержавеющие стали используют для изготовления гребных вистов судов ледового плавания, чугун и углеродистые стали - для гребных винтов малых тихоходных судов. Некоторое распространение получили гребные винты из пластических материалов - полиамидов и стеклопластиков на эпоксидно-фенольной основе.
Некоторые гребные винты представляют собой монолитную конструкцию, другие выполняются со съемными лопастями. Металлические гребные винты изготовляют путем литья с последующей механической обработкой. Поэтому монолитные винты, кстати наиболее распространенные, называют цельнолитыми. Винты со съемными лопастями устанавливают в основном на судах ледового плавания, где существует повышенная вероятность поломки лопастей. Съемные лопасти имеют в корневом сечения фланец и крепятся с помощью болтов или шпилек. Из-за наличия фланцев диаметр ступицы винта относительно больше, чем у цельнолитого, а форма ступицы гидродинамически менее благоприятна. Поэтому КПД таких винтов на 2-5 % ниже, чем у цельнолитых. Цельнолитые винты и винты со съемными лопастями часто называют винтами фиксированного шага (ВФШ).
Упор гребного винта на переднем ходу судна воспринимается конусом гребного вала, а на заднем - гайкой, навинчиваемой на нарезном конце вала.
Образование силы упора гребного винта. Если принять, что гребной винт вращается в твердой среде, как болт в гайке, то за один оборот он переместится в осевом направлении на расстояние, равное геометрическому шагу Н. Но гребной винт работает в жидкости, поэтому за один оборот, он переместится в осевом направлении на расстояние h3< Н. Величину h3 называют абсолютной поступью гребного винта. Если осевая скорость винта в жидкости V3 , то абсолютная поступь определяется соотношением h3 = V3 / n , где n - частота вращения винта.
Отношение абсолютной поступи h3 к диаметру винта D называют относительной поступью
и рассматривают как основную безразмерную кинетическую характеристику, определяющую режим работы винта в жидкости.
Гребной винт, вращаясь вокруг своей оси и перемещаясь поступательно, воздействует на жидкость, проходящую через его рабочее сечение. Прямолинейный поток, протекая через диск винта, ускоряется в осевом направлении (рис.2.12). Это приводит к сжатию струи, протекающей через винт. В диске винта поток получает приращение момента количества движения относительно оси винта и струя жидкости закручивается в сторону его вращения.
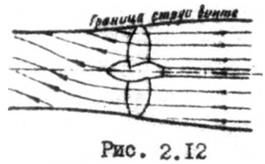 Таким образом, помимо образования осевых вызванных скоростей, возникают также тангенциальные скорости, направленные в сторону вращения винта и являющиеся источником дополнительных потерь.
Таким образом, помимо образования осевых вызванных скоростей, возникают также тангенциальные скорости, направленные в сторону вращения винта и являющиеся источником дополнительных потерь.
Рассмотрим многоугольник скоростей элемента лопасти гребного винта (рис.2.13), расположенного на радиусе r. Обозначим вызванную осевую скорость в диске винта Va 1, окружную - Vt 1, а их результирующую – V1, Будем полагать элемент неподвижным, а жидкость - набегающей на него с осевой скоростью V3 вследствие движения судна и окружной Vn=2πrn вследствие вращения винта.
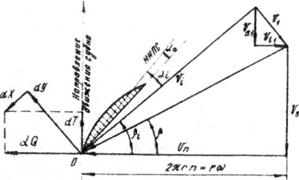 Геометрическая сумма V3, Vn, Va 1, Vt 1 является результирующей скоростью Vi потока, набегающего на рассматриваемый элемент лопасти. Эта скорость образует с элементом некоторый угол атаки. Примем, что силы, действующие на рассматриваемый элемент и элемент крыла бесконечного размаха с профилем той же формы, равны при одинаковых углах атаки. Известно, что на крыло, обтекаемое потоком под некоторым углом атаки, действует подъемная сила У, перпендикулярная скорости набегающего потока Vi, и сила профильного сопротивления X, противоположная по направлению этой скорости.
Геометрическая сумма V3, Vn, Va 1, Vt 1 является результирующей скоростью Vi потока, набегающего на рассматриваемый элемент лопасти. Эта скорость образует с элементом некоторый угол атаки. Примем, что силы, действующие на рассматриваемый элемент и элемент крыла бесконечного размаха с профилем той же формы, равны при одинаковых углах атаки. Известно, что на крыло, обтекаемое потоком под некоторым углом атаки, действует подъемная сила У, перпендикулярная скорости набегающего потока Vi, и сила профильного сопротивления X, противоположная по направлению этой скорости.
Гидродинамические характеристики профиля крыла определяются безразмерными коэффициентами подъемной силы Су и силы сопротивления Сх
 и коэффициентом обратного качества ε, который обычно называют "обратным качеством": ε = X/У = Сх / Су, где S - площадь крыла, р - плотность среды.
и коэффициентом обратного качества ε, который обычно называют "обратным качеством": ε = X/У = Сх / Су, где S - площадь крыла, р - плотность среды.
Коэффициенты Су и Сх для данного профиля являются функциями угла атаки. Угол атаки, при котором коэффициент Су обращается в нуль, называют углом нулевой подъемной силы, а направление потока, соответствующее этому углу, называют направлением нулевой подъемной силы (HНПC). Угол атаки удобнее отсчитывать от ННПС. Его называют гидродинамическим углом атаки α i, а образован он вектором скорости набегающего потока и ННПС. Характерные зависимости Су.
Сх и ε от гидродинамического угла атаки α i показаны на рис. 2.14. Коэффициент ε, характеризующий эффективность профиля, зависит от его формы, угла атаки и степени шероховатости поверхности. Существует такое значение α i = αопт, при котором ε = ε min принимает минимальное значение. Этот угол называют наивыгоднейшим или оптимальным углом атаки. Из рис.2.13 следует, что

 а
а
Угол β i, в свою очередь, является проекцией угла β, характериюущего соотношение между осевой и окружной составляющими скорости потока без учета вызванных скоростей.
Если скорость Vi образует с ННПС элемента угол α i, на нем, как на крыле, возникает подъемная сила Су и профильное сопротивление Сх. Проектируя эти силы на направление оси винта, получим упор, создаваемый элементом лопасти.

Проектируя силы dY и dX на направление окружной силы, получим касательную силы dQ, момент которой dM относительно оси винта преодолевается двигателем и составляет

Из (2.8) и (2.9) следует, что упор элемента лопасти создается за счет его подъемной силы, а профильное сопротивление уменьшает упор и увеличивает касательную силу, а, следовательно, потребный момент на валу гребного винта.
Полагая площадь элемента крыла dS = bdr , где b - ширина крыла, создаваемый им упор и момент можно выразить через безразмерные коэффициенты:
Чтобы определить упор T и момент Mв сопротивления вращению на валу гребного винта, необходимо проинтегрировать (2.10) и (2.11) в пределах длины лопасти l=R-r o и умножить их на число лопастей винта z:

Если в (2.12) вынесем за знак интеграла  , а в (2.13) множитель
, а в (2.13) множитель  , выражения упора и момента примут вид:
, выражения упора и момента примут вид:

Интегралы в (2.14) и в (2.15) не имеют размерности. Это позволяет считать их коэффициентами k1 и k2 соответственно. Величину k1 называют коэффициентом упора винта, а k2 - коэффициентом момента винта. Тогда

Мощность, необходимую для вращения винта, можно подсчитать по формуле

КПД винта в соответствии с 2.16, 2.18 и 2.7

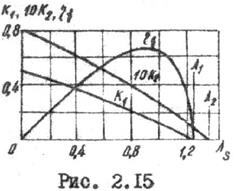
Безразмерные гидродинамические характеристики k1, k2 и ηв, представленные в функции относительной поступи λ S, называются кривыми действия винта (рис.2.15). С их помощью можно определить упор, момент и КПД изолированного винта при различных режимах его работы.
Геометрически подобные винты при одинаковых отношениях Vi и n будут иметь одинаковые значения k1 и k2 как интегралов в (2.14) и (2.15). Поэтому кривые действия определяются по результатам бассейновых испытаний моделей гребных винтов.
 Винты регулируемого шага. Гребные винты регулируемого шага (ВРШ) имеют съемные лопасти, которые с помощью специального механизма можно поворачивать при вращающемся винте. Характеристики ВРШ при установке его лопастей на номинальный шаг, соответствующий расчетному режиму работы, практически совпадают с аналогичными характеристиками обычного гребного винта. Небольшие различия наблюдаются лишь в коэффициенте полезного действия, который вследствие относительно больших размеров ступицы у ВРШ ниже на 1-2 %.
Винты регулируемого шага. Гребные винты регулируемого шага (ВРШ) имеют съемные лопасти, которые с помощью специального механизма можно поворачивать при вращающемся винте. Характеристики ВРШ при установке его лопастей на номинальный шаг, соответствующий расчетному режиму работы, практически совпадают с аналогичными характеристиками обычного гребного винта. Небольшие различия наблюдаются лишь в коэффициенте полезного действия, который вследствие относительно больших размеров ступицы у ВРШ ниже на 1-2 %.
Для перекладки (поворота) лопастей ВРШ используются гидравлические, электромеханические, механические и ручные приводы. Наиболее распространенными являются гидравлические приводы.
Поворот лопастей производят перемещением штанги, расположенной э полом гребном валу. Для ВРШ гидравлического типа наиболее характерно расположение силового органа в линии валопровода внутри судна. В некоторых ВРШ гидравлический силовой орган расположен в ступице, а внутри гребного вала проходит штанга золотника и подается масло под давлением.
По характеру работы ВРШ являются всережимными и обеспечивают получение всех ходов от полных вперед до полных назад.
Основными узлами ВРШ с гидравлическим приводом является винт с поворотными лопастями (ВПЛ), полый гребной вал, механизм изменения шага (МИШ), который используется, если силовой орган находится в линии валопровода внутри судна. Если цилиндр с поршнем расположены в ступице, то в линии валопровода монтируется масловвод. Систему ВРШ обслуживает гидравлическая установка с масляными насосами и специальная система управления, связанная с постом управления в рулевой рубке.
Применение ВРШ позволяет производить пуск гребного двигателя при минимальном моменте сопротивления, так как лопасти для пуска устанавливаются в положение "СТОП", соответствующее нулевому упору. Судно с ВРШ может двигаться с какой угодно малой скоростью, при неизменной частоте вращения главного двигателя. При наличии ВРШ реверс главного двигателя производится как аварийная мера при отказе гидравлической системы управления перекладкой лопастей. Применение ВРШ на буксире позволяет производить натяжение буксирного троса чрезвычайно плавно, что исключает обрыв троса.
К недостаткам ВРШ следует отвести сложность конструкции, высокую стоимость, которая выше стоимости такого же ВФШ в 3-4 раза, сложность обслуживания и ремонта и повышенный момент трогания с места.
Работа гребного винта с направляющей насадкой. Направляющая насадка представляет собой кольцевое крыло, соосное с гребным винтом и охватывающее с небольшим зазором концы лопастей гребного винта. Профиль крыла обращен выпуклой поверхностью внутрь насадки, закругленная кромка профиля направлена в сторону движения судна. Площадь входного отверстия насадки больше площади выходного отверстия. В наиболее узком сечении насадки - в ее средней части располагается гребной винт. Если насадка жестко закреплена на корпусе судна, она называется неподвижной. Когда насадка используется как орган управления, она может поворачиваться с помощью баллера, расположенного на 0,35-0,4 длины насадки от входящей кромки ее профиля. Такие насадки называют поворотными.
Между работающим гребным винтом и насадкой развивается взаимодействие, в результате которого на насадке создается дополнительная сила упора. Благодаря поджатию потока, подтекающему к гребному винту, обтекание профиля направляющей насадки, происходит под некоторым углом атаки α и профиль работает как элемент крыла (рис.2.16). Вследствие этого на элементе насадки возникает подъемной сила и сила профильного сопротивления. При соответствующем угле α проекция подъемной силы на направление движения оказывается больше проекции профильного сопротивления и дает составлявшую элементной силы упора ΔТН . Сумма элементных упоров определяет упор насадки ТН.
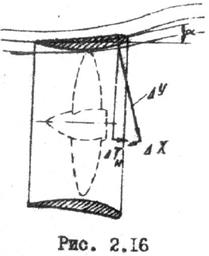 Таким образом упор ТК, комплекса винт-насадка можно представить как сумму ТК=Т+ТН, где Т - упор винта.
Таким образом упор ТК, комплекса винт-насадка можно представить как сумму ТК=Т+ТН, где Т - упор винта.
На ходовых режимах буксирных судов насадка позволяет повысить КПД комплекса на 20-30 %. Упор же при неподвижном судне (на швартовном режиме) увеличивается на 40-50 %.
2.5. Механические характеристики гребного винта
Режим работы винта подбирается так, чтобы винт в основном работал при максимальном значении ηв (рис.2.15), или близком к нему. В условиях спокойного состояния морской поверхности судно будет двигаться под действием силы упора с такой установившейся скоростью, при которой сила упора будет уравновешена только силой сопротивления движению самого судна. Зависимость между моментом на винте МВ и частотой его вращения ηв при таких условиях носит название характеристики винта в "свободной воде" (рис,2.17). В соответствии с (2.17) она имеет вид квадратичной параболы. Каждой точке этой характеристики соответствует определенная установившаяся скорость движения судна. Чем дальше от начала координат находится точка, тем выше скорость судна.
Если судно неподвижно при работающем винте, значение k2 в (2.Г7) выше, чем в предыдущем случав (λ S = 0; рис.2.15). При тех же значениях частоты вращения винта значения МВ будут больше. Механическая характеристика, соответствующая неподвижному судну, называется «швартовной» Мшв = аш nв2. Любой точке соответствует скорость судна
V3 = 0.
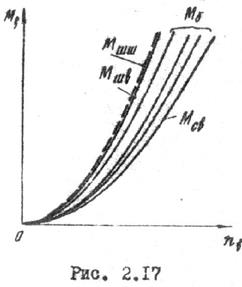 Между швартовной характеристикой и характеристикой в свободной воде располагаются так называемые буксировочные характеристики Мδ i =аδi nв2. Оки наблюдаются в том случае, если сопротивление судна по тем или иным причинам возрастает. Так же как и для характеристики в свободной воде, на буксировочных характеристиках каждой точке соответствует свое определенное значение скорости. В период ледостава в воде находится много частиц снега, отдельных кристаллов льда или мелких частиц его. Такое состояние воды имеет несколько, как правило, местных названий: "ледяная каша", "шуга", "сало" и др. Работа винта в таких условиях вше напряженнее. Швартовная характеристика в "шуге" Мшш = ашш nв2 проходит несколько выше Мшв, так как плотность среды в этом случае возрастает.
Между швартовной характеристикой и характеристикой в свободной воде располагаются так называемые буксировочные характеристики Мδ i =аδi nв2. Оки наблюдаются в том случае, если сопротивление судна по тем или иным причинам возрастает. Так же как и для характеристики в свободной воде, на буксировочных характеристиках каждой точке соответствует свое определенное значение скорости. В период ледостава в воде находится много частиц снега, отдельных кристаллов льда или мелких частиц его. Такое состояние воды имеет несколько, как правило, местных названий: "ледяная каша", "шуга", "сало" и др. Работа винта в таких условиях вше напряженнее. Швартовная характеристика в "шуге" Мшш = ашш nв2 проходит несколько выше Мшв, так как плотность среды в этом случае возрастает.
При заднем ходе судна характеристики аналогичны.
Рассмотренные характеристики относились к судну, движущемуся однонаправленно либо "вперед", либо "назад". При атом ходу "вперед" соответствует одно направление вращения винта, а ходу "назад" - противоположное. Швартовная характеристика может рассматриваться как частный случай движения со скоростью V3 = 0.
Рассмотрим характеристики при изменении направления вращения винта. Изменение направления вращения ВФШ производится с целью изменения направления движения судна на обратное. Такой маневр называют реверсом судна. Маневр изменения направления вращения винта называют реверсом винта. Поскольку гребной винт механически связан с главным двигателем, реверс винта производится путем реверсирования главного двигателя.
Время реверса зависит от инерционных масс, совершающих движение. Инерционность судна, движущегося поступательно, во много раз больше инерционности вращающегося винта и связанных с ним вала, присоединенных касс воды и движущихся частей главного двигателя. Они могут быть охарактеризованы их постоянными времени. Вследствие того, что постоянная времени судна на 1-2 порядка выше постоянной времени масс, связанных с вращательным движением винта, за время реверса винта скорость судна изменится незначительно, всего лишь на 2-5 %. Таким изменением скорости судна можно пренебречь, что позволит рассматривать реверс винта при неизменной поступательной скорости движения судна.
 Из рис.2.13 и 2.15 можно видеть, что при работе гребного винта на швартовах λ S = 0, а k1 и k2 будут наибольшими, поскольку углы α i достигают при этом максимальных значений. КПД винта ηв = 0, поскольку λ S = 0. С увеличением λ S углы на всех элементах лопасти возрастают, что приводит к уменьшению угла атаки α i, сил, действующих на эти элементы, и коэффициентов k1 и k2 винта в целом. При некотором значении λ S = λ1, коэффициент упора k1, обращается в нуль, а коэффициент момента k2>0, т.е. Т=0, а Мв≠0. Условие, которым определяется режим нулевого упора элемента лопасти винта dТ=0, может быть записано в виде d Yco s βi =dXsi n βi (рис.2.18а); КПД элемента лопасти в этом режиме будет равен нулю.
Из рис.2.13 и 2.15 можно видеть, что при работе гребного винта на швартовах λ S = 0, а k1 и k2 будут наибольшими, поскольку углы α i достигают при этом максимальных значений. КПД винта ηв = 0, поскольку λ S = 0. С увеличением λ S углы на всех элементах лопасти возрастают, что приводит к уменьшению угла атаки α i, сил, действующих на эти элементы, и коэффициентов k1 и k2 винта в целом. При некотором значении λ S = λ1, коэффициент упора k1, обращается в нуль, а коэффициент момента k2>0, т.е. Т=0, а Мв≠0. Условие, которым определяется режим нулевого упора элемента лопасти винта dТ=0, может быть записано в виде d Yco s βi =dXsi n βi (рис.2.18а); КПД элемента лопасти в этом режиме будет равен нулю.
При некотором значении λ S = λ0, причем λ1 < λ S < λ2 угол атаки элемента α i = 0 и подъемная сила на нем не создается d Y= 0 (рис.2.18б). Гребной винт в этом случае работает в режиме нулевой подъемной силы.
При дальнейшем росте λ S до значения λ S = λ коэффициент k2=0, а k1<0. Угол атаки α i <0 и подъемная сила на элементе лопасти также меняет свой знак (рис.2.18в). Гребной винт при этом работает в режиме нулевого момента. Он определяется условием dМв = 0, или d Yco s βi =dXsi n βi при d Y<0.
Анализируя кривые действия винта, можно заметить, что в диапазоне 0< λ S < λ1 гребной винт развивает положительный упор и работает как движитель. При λ S > λ1 винт работает в режиме гидротурбины, создавая вращающий момент. В диапазоне поступей λ1 < λ S < λ2, гребной винт не может быть использован ни как движитель (Т<0), ни как турбина (М>0).
Зависимость момента сопротивления винта от частоты его вращения при реверсе называют реверсивной характеристикой. На рис.2.19 показан типичный вид реверсивных характеристик ( ---- при направлении вращения винта, соответствующем ходу "вперед" и реверсу с хода "вперед" на ход "назад"; - - - - - обратного направления). Точками 1-5 показано значение частоты вращения, с которой начинается реверс. Каждой из точек соответствует свое значение скорости движения судна, причем VS1 > VS2 > VS3 > VS4 > VS5. Для каждой из реверсивных характеристик MР1 – MР5 считаем, что скорость судна VS1 – VS5 остается неизменной.
Чтобы среверсировать винт, уменьшают его частоту вращения. При этом довольно быстро падает момент сопротивления (см., например, характеристику MР1, при которой реверс начинаем с точки I и VS1). Если принять координаты точки за единицу, то уже при nв=0.6 – 0.75 Мв =0 (точка А). При дальнейшем уменьшении nв момент становится
отрицательным, т.е. сам винт переходит в режим гидротурбины. Если продолжать снижать частоту вращения максимальное значение момента в режиме гидротурбины наступит в точке В, при nв=0.35. Мв может достигать при этом 1,0 и даже выше. Если винт затормозить (nв=0; точка С) значение момента при этом будет по-прежнему отрицательным и равным 0,2-0,4. При вращении винта в обратную сторону отрицательный номинальный момент достигается уже пои частоте вращения nв = - (0,3 – 0,35). По мере накопления опытного материала относительно поведения гребных винтов в режиме их реверсирования выяснилось, что обобщенной реверсивной характеристики не существует. Особенно это относится к участку, характеризующему режим работы гидротурбиной.
2.6. Взаимодействие гребного винта со льдом
Удары лопастей о лед и заклинивание винта являются наиболее тяжелыми режимами работы гребной установки. Чаще всего именно они вызывают повреждения винтов и валов.
При работе ледоколов в полях ровного льда каждая лопасть в соприкосновение со льдом, разрушает его и далее поворачивается в свободной воде. Соответственно этому меняется и момент сопротивления. Он значительно увеличивается во время разрушения льда лопастью.
Если момент сопротивления больше некоторого предельного значения, то установке не будет в состоянии преодолевать дополнительную ледовую нагрузку. Гребной винт окажется заклиненным попавшей под его лопасти льдиной.
Наблюдения при плавании ледоколов в ледяных полях показали, что лопасти гребного винта фрезеруют попавшие под них льдины. Когда под лопасть попадает льдина, которую винт не в состоянии разрушить, она "буксируется" судном. Если она упрется в ледовое поле, силы, воспринимаемые лопастью, могут оказаться настолько большими, что повредят винт (чаще всего его лопасть) или даже вал.
В соответствии со свойствами льда (текучесть и хрупкость) он разрушается или вследствие смятия, или за счет скалывания с одновременным смятием. Не рассматривая вопроса, как определить необходимые для разрушения льда моменты на винте, обратимся к рис.2.20.
 Помимо характеристик винта в свободной воде и швартовной, на нем представлен характер граничных значений моментов на винте, необходимых для разрушения льда |4].
Помимо характеристик винта в свободной воде и швартовной, на нем представлен характер граничных значений моментов на винте, необходимых для разрушения льда |4].
Теоретическая зависимость значений момента разрушения льда смятием показана кривой Мсм. Аналогичная зависимость за счет смятия и скалывания изображена как Мсм+ск Проверка этих зависимостей на опыте показала, что существует некоторое значение момента М min, ниже которого разрушение льда не происходит. Результирующее значение момента, которое должно быть обеспечено для разрушения льда, показfно кривой Mвл, В диапазоне частот вращения винта 0 ≤ n < n1 она получается как сумма Мшв и левой ветви Мсм. На участке n1 ≤ n < n2 - как сумма Мшв и М min. На участке n2 ≤ n < n3 - за счет сложения Мшв с правой ветвью Мсм, а при n ≤ n3, как сумма Мшв + Мсм+ск.
Вращающиеся части системы двигатель-валопровод-движителъ можно рассматривать, как некоторые материальные массы (двигателя и движителя), соединенные между собой механической связью (валопроводом). Валопровод же обладает упругими свойствами. Эта система, как и любая другая механическая система, имеет собственную резонансную частоту колебаний. Резонансные колебания возникают при определенной частоте вращения гребного вала. При резонансных явлениях возникают повышенные напряжения в материале механической системы. Если в диапазоне рабочих частот вращения действующие механические напряжения превышают допускаемые для длительной работы. Регистр СССР требует назначить запретную зону частот вращения. Она должна быть не меньше определенной по формуле

где np - расчетная частота вращения, nзап - запретные частоты вращения, nрез - резонансная частота вращения, τрез - механическое напряжение при nрез τдоп допустимое механическое напряжение [7].
Резонансные колебания, возникавшие при вращательном движении, носят название крутильных колебаний. Причиной их возникновения является неравномерность действующего в системе какого-либо механического момента. Источником такой неравномерности, например, является двигатель внутреннего сгорания.
На судах ледового плавания источником неравномерности момента является гребной винт, взаимодействующий со льдом. Возникающие при крутильных колебаниях напряжения создают опасность внезапного разрушения элементов системы.
Бороться с такими явлениями можно либо пассивным, либо активным способом. К пассивному способу борьбы относится изменение параметров колеблющегося элемента, что позволяет сместить резонансную частоту и вывести ее за пределы рабочего диапазона. В рассматриваемом случае такой способ неприемлем, поскольку для смещения резонансной частоты за верхний предел рабочего диапазона, необходимо увеличивать диаметр вала, который уже у современных ледоколов достигает примерно метра.
Активный способ борьбы предполагает установку колебательной системы, создающей колебания той же частоты, но в противофазе. Таким способом можно уменьшить (сдемпфировать) переменную составляющую механических напряжений.
Очевидно, что энергетическая характеристика такой системы должна соответствовать энергетической характеристике источника крутильных колебаний. Поэтому такое решение либо малоприемлемо, либо совсем неприемлемо. Учитывая, что почти на всех ледоколах и судах активного ледового плавания подвод мощности от первичных двигателей к гребным винтам осуществляется с помощью электропередачи, целесообразно использовать ее демпфирующие свойства. Это возможно, поскольку при колебательном процессе между механической и электрической частями электропривода возникает обмен энергией, часть которой при этом теряется.
3. ГРЕБНАЯ УСТАНОВКА СУДНА
3.1. Передача
Для работы любого современного движителя необходимо подводить к нему механическую энергию, вырабатываемую двигателем. Устройство, с помощью которого передается эта энергия, и называется передачей. В состав передачи входят валопроводы, подшипники, редукторы, промежуточные преобразователи энергии из одной формы в другую.
Валопровод судна состоит из гребного, упорного и промежуточных валов, расположенных на одной оси. Все валы выполняются из стали, имеют осевое отверстие и соединяются между собой с помощью фланцевых соединений на болтах..
Валопровод располагается в подшипниках скольжения. Вес валопровода воспринимается опорными подшипниками; сила упора, создаваемая гребным винтом, передается на упорный подшипник. Дейдвудный опорный подшипник должен иметь специальное уплотнение для предотвращения попадания забортной воды внутрь судна, а при его масляной смазке и для предотвращения попадания масла в водную среду.
Гребной винт работает при малой частоте вращения. Зачастую же двигатели имеют частоту вращения значительно более высокую. Для согласования частот вращения гребного винта и двигателя, а также для обеспечения необходимого крутящего (движущего) момента применяют редукторы, или осуществляют преобразование механической энергии двигателя в промежуточную (электрическую или гидравлическую), а промежуточной повторно в механическую, но уже с параметрами, необходимыми для работы движителя.
Передачи, в которых отсутствует преобразование механической энергии в промежуточную, называют прямыми передачами. Передачи, в которых имеется такое преобразование называют непрямыми передачами. В соответствии с этим все гребные установки разделяют на 2 основных группы. В настоящее время все типы гребных установок с точки зрения преобразования энергии вписываются в схему рис.3.1, на котором представлены некоторые из них, где Д - дизель; ПГ - парогенератор; ГТ - газовая турбина; ЯРПГ - ядерный реактор с парогенератором; ПТ - паровая турбина; ГН - гидронасос; ГМ - гидромотор; ЭГ - электрогенератор; ГЭД - гребной электродвигатель; QT - энергия топлива; QTЕРМ - термическая энергия; Qмех - механическая энергия; QПР - промежуточный вид энергии (гидравлическая, электрическая); QГИДР - гидравлическая энергия.
3.2. Мощность гребной установки
В соответствии с (2.1) мощность, подводимая к гребному валу, равна мощности на фланце теплового двигателя (двигателей) а гребной установке о прямой передачей. 3 гребной установке с непрямой передачей эти мощности отличаются на величину потерь в дополнительных промежуточных преобразователях и связях между ними.
Таким образом, для непрямой передачи следует отличать мощность, подводимую к гребному валу, и мощность на фланце теплового двигателя (фланцах тепловых двигателей). Бывает также необходимым учитывать мощность промежуточного преобразователя (преобразователей) и мощность, потребляемую гребным двигателем (двигателями). Полезная мощность гребного двигателя (двигателей, если их несколько на одном гребном валу) равна мощности, подводимой к гребному валу. КПД передачи ηПЕР в (2.1) можно определить как ηПЕР = ηПР3 ηПР4 ηс, где ηПР3 и ηПР4 - КПД преобразователей 3 и 4 (рис.3.1) соответственно; ηс - коэффициент, учитывающий потери в канале передачи энергии от преобразователя 3 к преобразователю 4.
При нескольких гребных валах под понятиями мощности ГЭУ подразумевается сумма мощностей на всех гребных валах. Распределение мощности в номинальном режиме на разные гребные валы может быть неодинаковым. Тогда говорят о соотношении мощностей на гребных валах. Например, ледокол "Ленин" имеет соотношение мощностей на гребных валах 1:2:1, т.е. мощность на среднем валу вдвое выше мощности на бортовом валу [з].
3.3. Преобразователи энергии топлива в механическую
Строго говоря, еще не найдено способа преобразования энергии топлива непосредственно в механическую. Вначале ее приходится преобразовывать в термическую или тепловую, а затем уже термическую в механическую. Эти преобразования производятся либо в отдельных преобразователях, либо сразу оба производятся в одном и том же. К первому случаю следует отнести парогенератор, в котором энергия сжигаемого топлива преобразуется в тепловую энергию нагретого пара, и паровую машину (турбину), преобразующую энергию пара в механическую. Между собой преобразователи связываются паропроводом. Ко второму случаю относятся двигатели внутреннего сгорания и газовые турбины. В них энергия горячих газов, полученных при сжигании топлива, сразу же преобразуется в механическую.
Из тепловых двигателей на судах нашли применение дизели, паровые и газовые турбины. Широко распространенные ранее паровые машины к настоящему времени уже утратили свое значение [6].
Дизели. Наиболее широкое применение для движения судов нашли дизели - двигатели внутреннего сгорания с воспламенением рабочей смеси от сжатия, работающие на тяжелом жидком топливе, Рабочая смесь, т.е. смещение топлива с воздухом, производится внутри рабочих цилиндров, к которым воздух и топливо подаются раздельно.
Принцип действия такого двигателя кратко можно изложить следующим образом. Введенная в цилиндр рабочая смесь сжимается поршнем. В конце сжатия смесь воспламеняется. Образовавшиеся газообразные продукты сгорания, имеющие высокую температуру, повышают давление в цилиндре. В результате этого поршень перемещается и через кривошипно-шатунный механизм поступательное движение поршня преобразуется во вращательное движение вала. После расширения продукты сгорания удаляются из цилиндра, последний заполняется новой порцией рабочей смеси и начинается новый рабочий цикл. Часть рабочего цикла, происходящего за один ход поршня, называется тактом.
Дизели могут быть двухтактные и четырехтактные. Рабочий цикл у них происходит за один оборот вала (2 хода поршня) или за два (4 хода поршня) соответственно. На судах нашли применение многоцилиндровые дизели с вертикальным и V -образным расположением цилиндров. Для гребных установок с прямой передачей применяют реверсивные дизели, а с непрямой передачей - нереверсивные.
Дизели состоят из отдельных систем и агрегатов, тлеющих определенное назначение. К основным из них относятся корпус, кривошипно-шатунный механизм, газораспределительный механизм, топливная система, система впуска воздуха и выпуска отработанных газов, система смазки и система охлаждения.
Условия, необходимые для нормального смесообразования, сжатия и воспламенения возникают при достижении определенной частоты вращения коленчатого вала дизеля. У большей часта дизелей она составляет 0,3-0,4 от номинальной и называется минимально устойчивой частотой вращения дизеля. Процесс принудительного проворачивания коленчатого вала от неподвижного состояния до минимально устойчивой частоты вращения с последующей подачей топлива называется пуском дизеля. Пуск дизеля осуществляют с помощью пневматического устройства или электростартера. Пневматическое устройство обеспечивает пуск сжатым воздухом, подаваемым в цилиндры дизеля от баллонов. Баллоны предварительно накачиваются воздушным компрессором, приводимым в действие самим дизелем или посторонним источником энергии. Электростартерное устройство представляет собой электродвигатель постоянного тока, питающийся от аккумуляторной батареи, который с помощью специального устройства вводится в зацепление с зубчатым колесом маховика дизеля. В ГЗУ постоянного тока в качестве электростартера может использоваться генератор, переводимый в режим двигателя.
Дизели имеют относительно высокий КПД (34-40 %), малое время подготовки к пуску и работе (1-2 мин). Регулирование частоты вращения и мощности дизеля осуществляется изменением количества подаваемого топлива с помощью регулирующей рейки топливных насосов. Судовые дизели допускают кратковременное увеличение частоты вращения на 10-15 %, а также перегрузку по мощности на 10% в течение I часа. На рис.3.2. показан вид основных внешних и регуляторных характеристик дизеля: а) внешние: I и I΄ - максимальные; 2, 2΄, 2" - основные; 3 - эксплуатационная; 3 и 4 - частичные; 5 - нижняя ограничительная; 6 - установка предельного выключателя; б) регуляторные: 1, 2, 3 - астатические; 1΄, 2΄, 3΄ - статические; 4 - основная; 5 - установка предельного выключателя.
Зависимость основных параметров MВР , РПД, q (момент, мощность и удельный расход топлива) от частоты вращения дизеля называют внешними характеристиками. Они снимаются при ручном управлении подачей топлива. Внешние характеристики при кратковременной нагрузке (1-2 часа) и предельной подаче топлива называют максимальными. Основные внешние характеристики соответствуют длительной мощности. Точки, лежащие на этих характеристиках при номинальной частоте вращения, соответствуют номинальным моменту и мощности, а также удельному расходу топлива в номинальном режиме работы. Характеристики, соответствующие меньшим значениям подачи топлива, называют частичными. Частичную внешнюю характеристику, при которой обеспечивается долговременная и экономичная работа дизеля, называют эксплуатационной (при номинальной частоте вращения мощность равна примерно 80 % от номинальной). Частичная характеристика, соответствующая минимальной мощности при длительной работе, называется нижней ограничительной.
Регуляторные характеристики (рис.3.2(б)) - зависимости параметров от частоты вращения при разных установках всережимного регулятора, который при переменной нагрузке поддерживает любую заданную частоту вращения изменением подачи топлива. Основная внешняя характеристика (кривая 4) и характеристика установки предельного выключателя (кривая 5) остаются теми же, что и в случае, представленном на рис.3.2а (кривые 2 и 6 соответственно), дизель со всережимным регулятором при заданной частоте вращения работает по регуляторным характеристикам при астатическом (кривые 1.2,3) или статическом (кривые l', 2', 3') регулировании.
У судовых дизелей предусматривается аварийная защита в следующих случаях: а) при превышении допустимой частоты вращения - с помощью центробежного предельного регулятора (выключателя); б) при снижении давления масла ниже допустимого - с помощью реле давления которое снимает нагрузку и перекрывает подачу топлива; в) при переходе одного из последовательно включенных генераторов постоянного тока в двигательный режим в случае остановки его дизеля (защита г обратного вращения - с помощью реле давления пресной воды (если вода подается навешенным насосом), которое при понижении давления до 40-25 % номинального снимает возбуждение с генератора останавливающегося агрегата. Эту защиту можно выполнить с помощью реле напряжения, подключенного к тахогенератору дизеля - реле снимает возбуждение с генератора при понижении частоты вращения до 20-40 % минимально устойчивой. 
На рис.3.3 приведена зависимость относительной массы дизеля от частоты вращения. Очевидно, что дизель, применяемый для прямой передачи, будет иметь значительную массу, поскольку частота его вращения определяется частотой вращения винта (1,5 – 4,0 с-1).
 Паровые турбины. Гребные установки с паровыми турбинами применяют на судах для движения которых требуются большие мощности (не менее 20000 кВт). Принципиальная схема паротурбинной гребной установки прямого действия приведена на рис.3.4. Энергия Q1 топлива, сжигаемого в топке парового котла I, нагревает воду и превращает ее в пар требуемых параметров (температуры и давления). Пар подается в турбину 2, в которой его энергия преобразуется в механическую и через редуктор 3 передается на гребной винт 4. Отработанный пар поступает в конденсатор 5, где охлаждается и конденсируется. Вода из конденсатора подается насосом 6 в емкость 7, откуда с помощью питательного насоса 8 подается в паровой котел.
Паровые турбины. Гребные установки с паровыми турбинами применяют на судах для движения которых требуются большие мощности (не менее 20000 кВт). Принципиальная схема паротурбинной гребной установки прямого действия приведена на рис.3.4. Энергия Q1 топлива, сжигаемого в топке парового котла I, нагревает воду и превращает ее в пар требуемых параметров (температуры и давления). Пар подается в турбину 2, в которой его энергия преобразуется в механическую и через редуктор 3 передается на гребной винт 4. Отработанный пар поступает в конденсатор 5, где охлаждается и конденсируется. Вода из конденсатора подается насосом 6 в емкость 7, откуда с помощью питательного насоса 8 подается в паровой котел.
Для атомной паротурбинной гребной установки схема остается той же. Место парового котла с топкой в этом случае занимает ядерный реактор с парогенератором.
Частота вращения судовых паровых турбин достигает 100 с-1 и выше при мощности до 45-50 тысяч киловатт. Момент на зубчатых колесах редуктора достигает сотен тысяч ньютонометров. Для работы с такой частотой вращения и высоким моментом зубцы редуктора требуют высокой прочности и точности изготовления.
Полный ход судна обеспечивает турбина полного хода, экономический и малый ход - турбина экономического хода, задний - турбина заднего хода. Чаще всего турбины полного и экономического хода имеют две или три ступени - высокого, среднего и низкого давления. Все рабочие колеса турбин располагаются на одном валу. При работе одной турбины рабочие колеса других турбин вращаются вхолостую. Таким образом, главная судовая турбина является комплексом турбин, выполненных в одном корпусе.
Внешняя и регуляторная характеристики (рис.3.5) имеют прямолинейные зависимости. Точка номинального режима работы турбины находится на регуляторной характеристике (nH; Р H). Предельной подаче пара соответствует перегрузка, достигающая 25% от Р H. Если нагрузка превысит допустимый предел 125%, то турбина должна остановиться. При снятии нагрузки регулятор уменьшает подачу пара и частота вращения достигает n0. Диапазон регулирования частоты вращения турбины довольно широк и равен 25-115%. В связи с этим резонансная частота должна соответствовать более высокой частоте вращения. Для этого лопатки ротора турбин делаются более толстыми по сравнению с лопатками турбин, работающих при постоянной частоте вращения.
 В ГЭУ главные турбины значительно проще, так как отсутствует необходимость в создании на одном валу комплекса турбин. В тех ГЭУ, в которых предусматривается работа главных генераторов с неизменной частотой вращения, толщина лопаток ротора турбин меньше, чем у турбин, работающих при регулируемой частоте вращения.
В ГЭУ главные турбины значительно проще, так как отсутствует необходимость в создании на одном валу комплекса турбин. В тех ГЭУ, в которых предусматривается работа главных генераторов с неизменной частотой вращения, толщина лопаток ротора турбин меньше, чем у турбин, работающих при регулируемой частоте вращения.
Относительный эффективный КПД турбогенератора достигает 75-81%. Абсолютный же эффективный КПД паротурбинной установки (ПТУ) с учетом котельной установки составляет около 25 %. Удельный расход топлива равен 365-380 г/кВт ч. Механические потери в самой турбине составляют 1-3 % ее мощности.
Регулирование частоты вращения и мощности обычно производится специальным маневровым клапаном, изменяющим количество подаваемого пара. Для поддержания заданной частоты вращения при изменениях нагрузки турбины оборудуют быстродействующим регулятором постоянства частоты вращения, который изменяет подачу пара в турбину. Регулятор приводит мощность турбины в соответствие с мощностью нагрузки и поддерживает заданную частоту вращения, а также обеспечивает устойчивую работу турбины при внезапном сбросе или набросе нагрузки. При расчетах ГЗУ учитывают времена наброса и сброса 100 % нагрузки, максимальные и минимальные значения частоты вращения при этом сбросе и набросе, а также статизм и точность регулятора.
Для экстренной остановки турбины перед дай на главном вало-проводе устанавливается быстрозапорный клапан (БЗК).
Турбина снабжается выключателем предельной частоты вращения, который действует на БЗК, независимо от других регуляторов и прекращает подачу пара при достижении турбинной частоты вращения, равной 112-115 % от номинальной.
Аварийная остановка турбины воздействием на БЗК предусматривается в следующих случаях: а) при повышении допустимой частоты вращения; б) при понижении давления масла в напорном маслопроводе ниже допустимого; в) при резком ухудшении вакуума в конденсаторе. В ГЗУ должна предусматриваться защита от недопустимого разгона (если он возможен) ротора турбины энергией рекуперации в переходных режимах. Эта защита может быть осуществлена, например, с помощью реле напряжения, подключенного к тахогенератору турбины. При недопустимом увеличении частоты вращения (разгона) реле срабатывает и дает сигнал на снижение двигательного момента генератора до значения, меньшего, чем момент механических потерь турбины. Установка срабатывания должна быть ниже установки предельного выключателя - 105 % номинальной частоты вращения.
Газовая турбина. Это агрегат, объединяющий компрессор, камеру сгорания и собственно газовую турбину. Газовая турбина вращает компрессор, а ее избыточную мощность используют для выполнения работы. Компрессор может быть выполнен на базе дизель-компрессора в так называемом свободно-поршневом генераторе газа. В этом случае для выполнения работы используется воя мощность газовой турбины.
Газовая турбина конструктивно и по принципу действия аналогична паровой. При общности термодинамических процессов турбины отличаются друг от друга. Наиболее существенное отличие состоит в том, что в газотурбинной установке (ГТУ) рабочее тело не превращается в жидкость в процессе отвода тепла и в пар - в процессе его подвода, а поэтому котел и конденсатор пара отсутствуют. Это приводит к большей экономичности и снижению массо-габаритных показателей. Характеристики газовой турбины показаны на рис.3.6.
Наибольший абсолютный эффективный КПД газовой турбины соответствует одной точке кривой мощности, находится в области ее максимального значения и достигает 85-89 %. Б связи с этим она имеет небольшой диапазон регулирования частоты вращения. Ее использование целесообразно в установках с неизменной частотой вращения, т.е. при прямой передаче с ВРШ или в непрямой передаче.
Запуск газовой турбины осуществляется с принудительным разворачиванием ее вала специальным пусковым двигателем.
 Система управления газовой турбиной сложна, так как она должна воздействовать на расход, давление и температуру газа и воздуха, а также изменять количество подаваемого топлива в камеру сгорания.
Система управления газовой турбиной сложна, так как она должна воздействовать на расход, давление и температуру газа и воздуха, а также изменять количество подаваемого топлива в камеру сгорания.
В ГТУ предусматривается защита, прекращающая подачу топлива в следующих случаях: а) при достижении предельно допустимой частоты вращения (110-112% номинальной); б) при превышении допустимого значения температуры газа; в) при снижении давления масла и охлаждающей воды ниже предельного значения.
Список литературы
1. В.Веллер. Автоматизация судов. - Л.: Судостроение, 1975.
2. Войткунский Я.И., Першиц Р.Я,, Титов И.А. Справочник по теории корабля. Судовые движители и управляемость. - Л.: Судостроение. 1973.
3. Горбунов Б.А., Савин А.С., Сержантов В.В. Современные и перспективные гребные электрические установка судов. - Л.: Судостроение, 1979.
4. Гребные электрические установки: Справочник/К.Б.Айзенштадт, Ю.М.Гилерович, Б.А.Горбунов, В.В.Сержантов. - Л.: Судостроение, 1985. . ' '
5. Костюков А.А. Сопротивление воды движению судов. - Л.: Судостроение, 1966.
6. Михаилов В.А. Автоматизированные электроэнергетические системы судов. - Л.: Судостроение, 1977.
7. Регистр СССР. Правила классификации и постройки морских судов. -Л.: Транспорт, 1981.
8. Рукавишников СБ. Автоматизированные гребные электрические установки. - Л.: Судостроение, 1983.
9. Русецкий А.А. Движители судов с динамическими принципами поддержания. - Л.: Судостроение, 1979.