
4. Привести расчетные соотношения и результаты вычислений значения KОПТ двумя способами.








5. Сопоставить результаты эксперимента с теоретическими сведениями. Подтвердить наличие корреляции процессов g(t) и v(t).
6. Построить семейство ЛХ и АЧХ САУ для нескольких значений параметра K (в том числе – для расчетного значения KОПТ).
7.3. Содержание отчета
1. Структурная схема исследуемой САУ.
2. Основные расчетные соотношения.
3. Экспериментальные зависимости по пп.1-4 задания.
4. Семейства ЛХ и АЧХ.
5. Выводы по результатам экспериментальных исследований.
7.4. Контрольные вопросы
1. С физической точки зрения объяснить влияние параметра K на уровень флюктуационной и динамической составляющих ошибки САУ.
2. Как вычисляется дисперсия суммы 2-х коррелированных случайных процессов?
3. Какой порядок астатизма имеет исследуемая система (рис.3) по выходу y(t)? по выходу ε(t)?
4. Оценить влияние параметра K на дисперсию случайного процесса y(t), если на вход САУ поступает только экспоненциально-коррелированный процесс g(t). Чему равна дисперсия y(t) при неограниченном росте K?
5. Как отражается улучшение фильтрующих свойств системы на корреляционных свойствах флюктуационной ошибки?
6. Какой должна быть структура САУ, согласованной с формирующим фильтром данного макета?
8. Исследование нелинейной САУ
(лабораторная работа 7)*
Цель работы – ознакомление с практическим использованием методов гармонической и статистической линеаризации при анализе САУ, содержащей релейный элемент и инерционную линейную часть.
8.1. Описание лабораторной установки
Лабораторная установка содержит макет САУ, внешний генератор широкополосных случайных процессов и осциллограф. Исследуемая САУ (рис. 4) включает в себя нелинейный элемент типа реле с петлей гистерезиса и линейную часть, состоящую из электронного интегратора и цепей коррекции с функциями передачи z1(jω) и z2(jω).
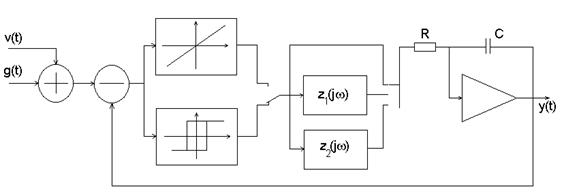
Рис.4
Схемы цепей коррекции и их параметры приведены на лабораторном макете. Нелинейный элемент может выключаться. На вход САУ можно подать скачкообразный сигнал g(t), а также широкополосный случайный процесс v(t) (с нулевым средним и спектральной плотностью мощности  ). Уровень случайного процесса v(t) можно менять. Выходной сигнал y(t) контролируется с помощью осциллографа.
). Уровень случайного процесса v(t) можно менять. Выходной сигнал y(t) контролируется с помощью осциллографа.
Метод гармонической линеаризации используется для анализа автоколебаний в нелинейной САУ. В ходе этого анализа необходимо ответить на следующие вопросы:
1) возможно ли возникновение автоколебаний в нелинейной САУ?
2) устойчив ли режим автоколебаний в случае их возникновения?
3) каковы параметры автоколебаний (амплитуда и частота)?
Условия возникновения автоколебаний в нелинейной САУ определяются решением уравнения замыкания

 ,
,
где  - эквивалентная функция передачи нелинейного элемента;
- эквивалентная функция передачи нелинейного элемента;
 - амплитуда 1-й гармоники на входе нелинейного элемента;
- амплитуда 1-й гармоники на входе нелинейного элемента;  - функция передачи линейной части системы.
- функция передачи линейной части системы.
Для исследуемого в макете САУ нелинейного элемента типа реле с петлей гистерезиса
 ,
,
где  ;
;  ;
;  и
и  - параметры нелинейного элемента, характеризующие размеры петли гистерезиса для входного и, соответственно, выходного процессов.
- параметры нелинейного элемента, характеризующие размеры петли гистерезиса для входного и, соответственно, выходного процессов.
Эта функция передачи может быть представлена в виде
 ,
,
где  . Такая запись показывает, что амплитуда 1-й гармоники на выходе реле с петлей гистерезиса такая же, как и на выходе идеального реле. Однако имеется фазовый сдвиг φ, обусловленный запаздыванием срабатывания такого реле в сравнении с идеальным.
. Такая запись показывает, что амплитуда 1-й гармоники на выходе реле с петлей гистерезиса такая же, как и на выходе идеального реле. Однако имеется фазовый сдвиг φ, обусловленный запаздыванием срабатывания такого реле в сравнении с идеальным.
Уравнение замыкания представляется в виде

и решается графически. Для этой цели следует построить годограф Найквиста линейной части и годограф  нелинейного элемента. Наличие точки пересечения годографов является признаком возможности возникновения автоколебаний в нелинейной САУ. Устойчивость автоколебаний проверяется с помощью правила: режим автоколебаний в системе устойчив, если точка на годографе , соответствующая увеличению амплитуды, не охватывается (в смысле критерия устойчивости Найквиста) годографом .
нелинейного элемента. Наличие точки пересечения годографов является признаком возможности возникновения автоколебаний в нелинейной САУ. Устойчивость автоколебаний проверяется с помощью правила: режим автоколебаний в системе устойчив, если точка на годографе , соответствующая увеличению амплитуды, не охватывается (в смысле критерия устойчивости Найквиста) годографом .
Параметры автоколебаний (амплитуда и частота) определяются значениями соответствующих аргументов годографов в точке пересечения, однако для их определения необходимо иметь явную зависимость от аргументов функций и . Параметры автоколебаний можно также определить экспериментально с помощью осциллографа.
Метод статистической линеаризации используется для анализа нелинейной САУ при воздействии на нее шума. При этом нелинейный элемент заменяется эквивалентным линейным элементом с двумя коэффициентами усиления: для регулярной составляющей сигнала (математического ожидания)  и центрированной случайной составляющей сигнала
и центрированной случайной составляющей сигнала  . Для реле с петлей гистерезиса коэффициенты и определяются с помощью выражений
. Для реле с петлей гистерезиса коэффициенты и определяются с помощью выражений
 ,
,
 ,
,
где  и
и  - математическое ожидание (среднее) и среднеквадратичное значение сигнала на входе нелинейного элемента;
- математическое ожидание (среднее) и среднеквадратичное значение сигнала на входе нелинейного элемента;  - интеграл вероятности.
- интеграл вероятности.
Так как коэффициент зависит от , то и функция передачи линеаризованной САУ  зависит от уровня шума. Поэтому изменение влияет на свойства нелинейной САУ.
зависит от уровня шума. Поэтому изменение влияет на свойства нелинейной САУ.
8.2. Задание по работе
1. Расчетная часть.
1) Построить ЛХ линейных САУ с различными цепями коррекции (значения параметров линейной части САУ указаны на лабораторном макете).
2) Построить годографы и нелинейных САУ с различными цепями коррекции и выполнить анализ автоколебаний. При построении годографа следует учесть, что
 ,
,
 .
.
3) Для различных значений построить семейство ЛХ линеаризованных САУ с различными цепями коррекции и функцией передачи . При вычислении коэффициента использовать допущение  (ошибка слежения в среднем близка к нулю), при котором громоздкое выражение для можно упростить:
(ошибка слежения в среднем близка к нулю), при котором громоздкое выражение для можно упростить:
 .
.
Расчет выполнить для значений , равных  .
.
2. Экспериментальная часть.
1) Подавая скачкообразное воздействие g(t), посмотреть на экране осциллографа и зарисовать переходные процессы линейных САУ 3-х типов (без коррекции и с цепями коррекции z1(jω) и z2(jω)). По степени колебательности переходных процессов оценить запас устойчивости по фазе.
2) Выполнить экспериментальный анализ автоколебаний в нелинейных САУ 3-х типов. Измерить частоту и амплитуду автоколебаний.
3) Для 3-х типов нелинейных САУ экспериментально исследовать срыв автоколебаний при изменении уровня шума на входе системы. Для этого следует постепенно увеличивать уровень шума до некоторого порогового уровня, при котором исчезает регулярная составляющая в выходном сигнале САУ (отсутствие регулярных автоколебаний свидетельствует о выполнении условий статистической линеаризации САУ). Пороговый уровень шума измерить.
4) Экспериментально исследовать влияние уровня шума на качество переходных процессов нелинейных САУ 3-х типов. Для этого установить уровень шума, соответствующий линеаризации САУ (срыв автоколебаний) и посмотреть несколько переходных процессов на экране осциллографа. Зарисовать усредненный (по ансамблю реализаций) переходный процесс. Затем увеличить уровень шума, снова посмотреть несколько реализаций переходного процесса, зарисовать усредненный процесс и сопоставить результаты. Уровни шума измерить с помощью осциллографа (при оценке процесс считать нормальным, не выходящим за пределы  ).
).
5) Экспериментально оценить фильтрующие свойства линейных и нелинейных САУ 3-х типов.
8.3. Содержание отчета
1. Структурная схема макета САУ.