
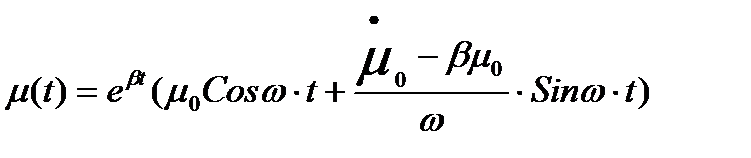
Решение дифференциального уравнения








Уравнение вынужденного движения (1) имеет вид:
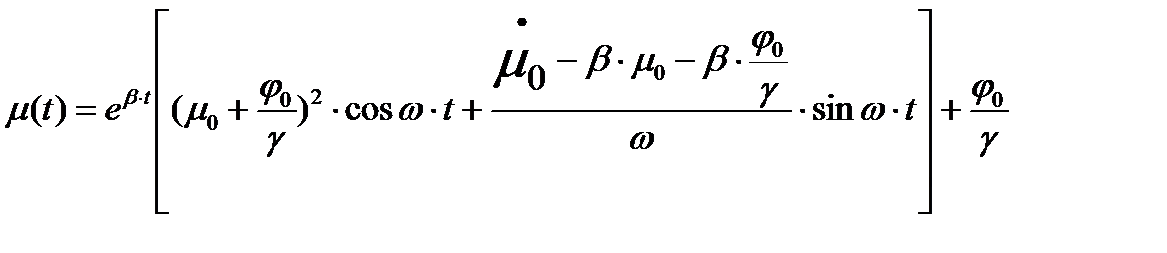
Где
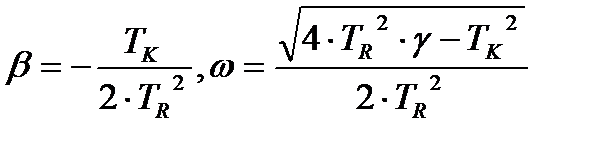
вещественная и мнимая части комплексных сопряженных корней λ1,2 =β±jω характеристического уравнения
Tr2 ∙λ2+Tk ∙λ2+γ=0.
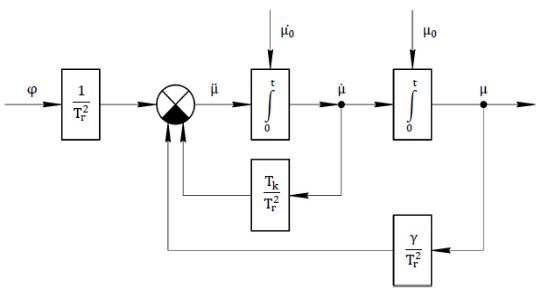
СТРУКТУРНАЯ СХЕМА
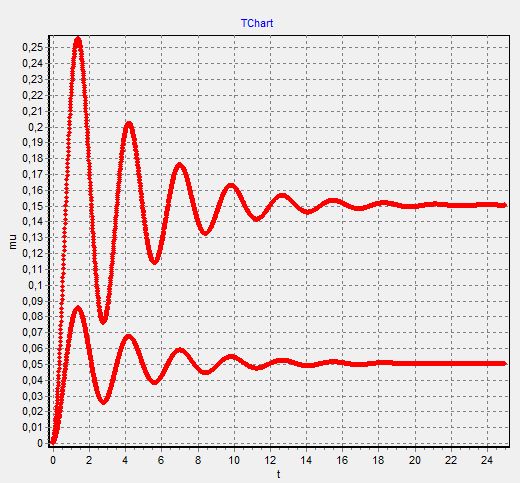
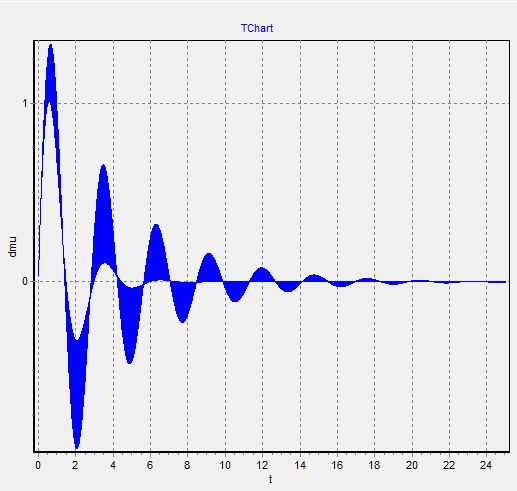
ГРАФИКИ
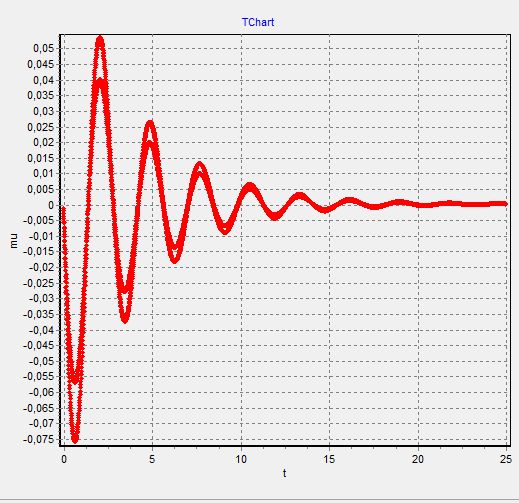
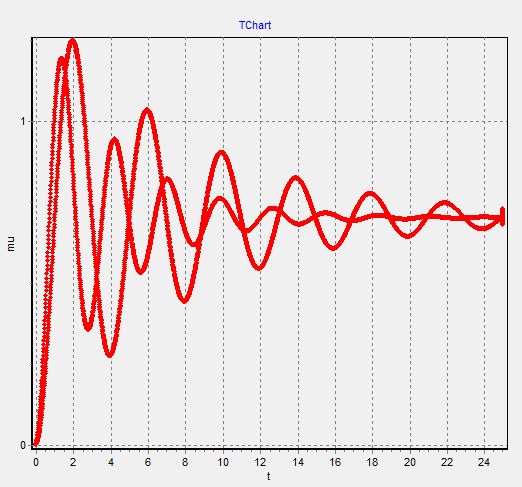
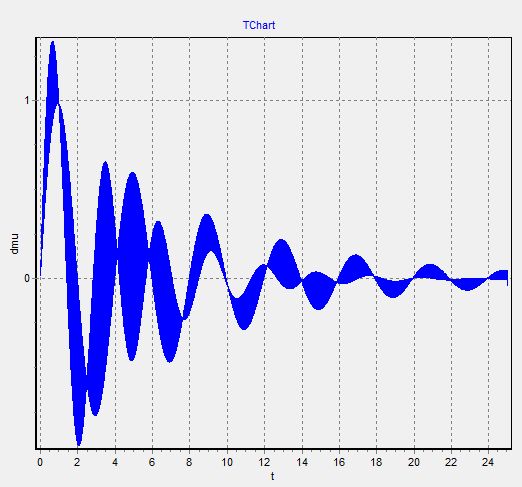
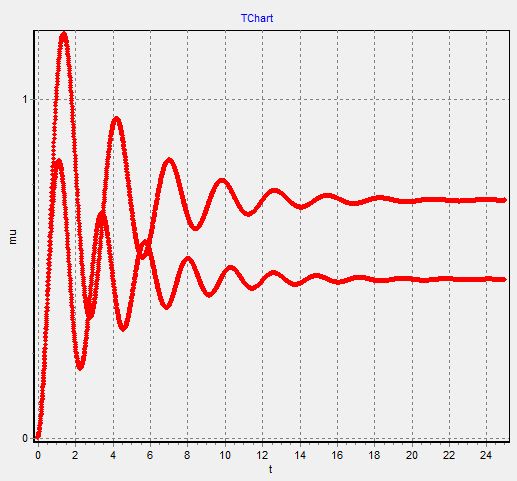
Снимаем наши графики при данных:
Tr2=2
T k =1
 =10
=10
График 1

| 2 |

| 1 |

| 0 |

| 0 |

| 0,5 |

| 10 |
| Время набл. | 25сек |
| Шаг | 0,01 |

| 10 |
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 1,5 |
|
| 10 |
| Время набл. | 25сек |
| Шаг | 0,01 |
|
| 10 |
До изменения После изменения
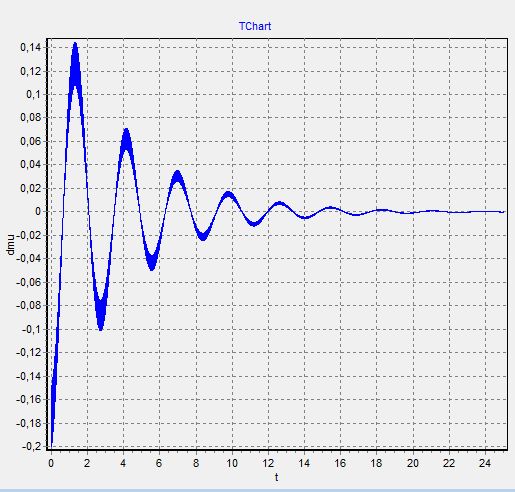
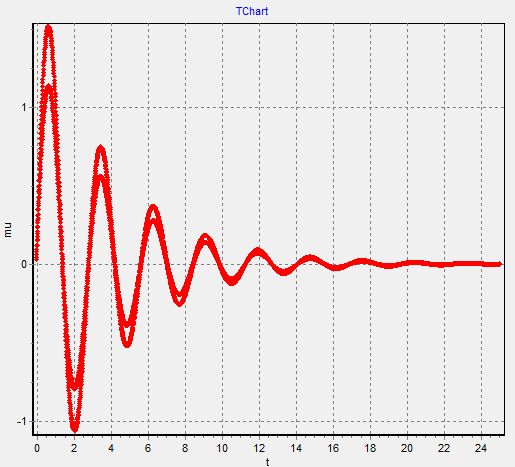
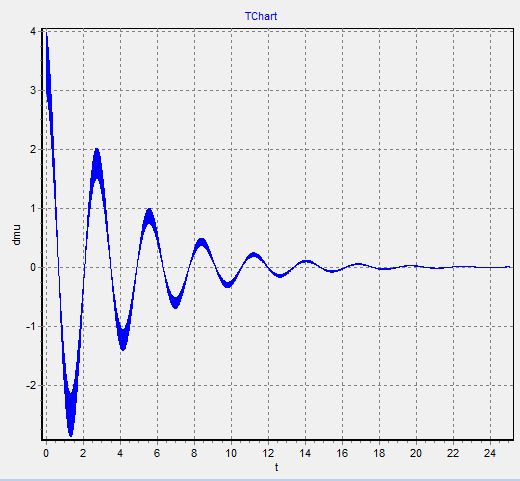
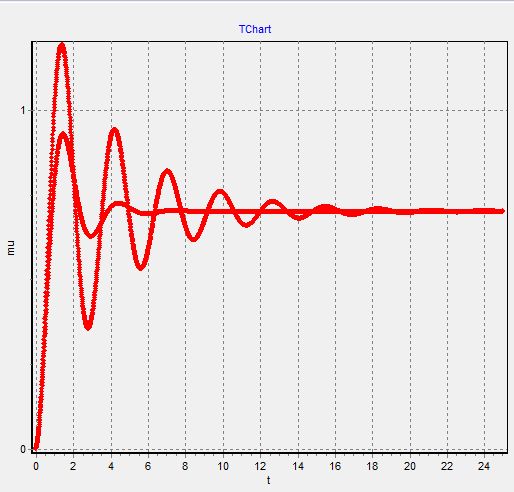
1. График μ(t)−изменяем при = =0

 Так как при составлении графиков, они сливаются друг с другом (видимо, ошибка программы), то мы строим графики раздельно
Так как при составлении графиков, они сливаются друг с другом (видимо, ошибка программы), то мы строим графики раздельно
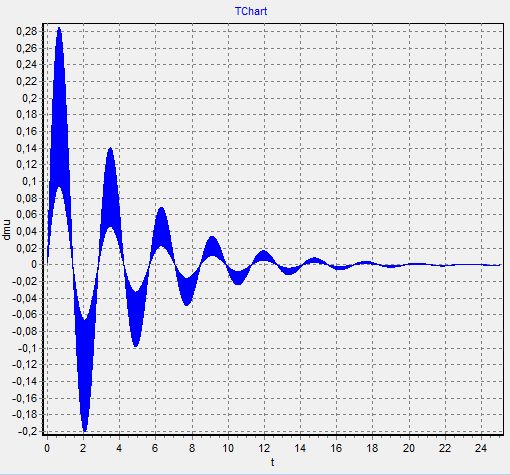
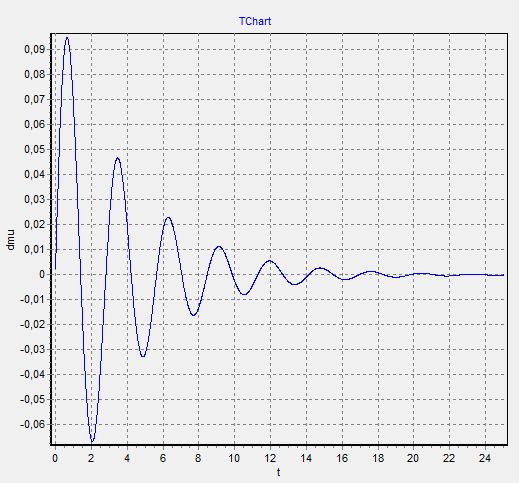
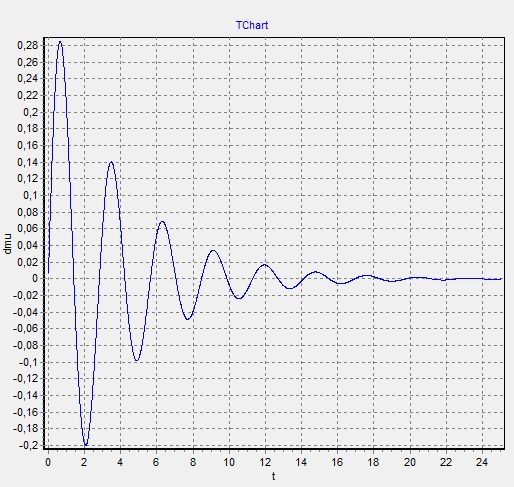
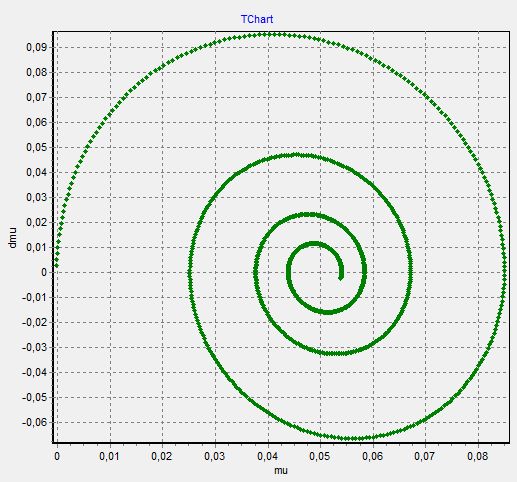
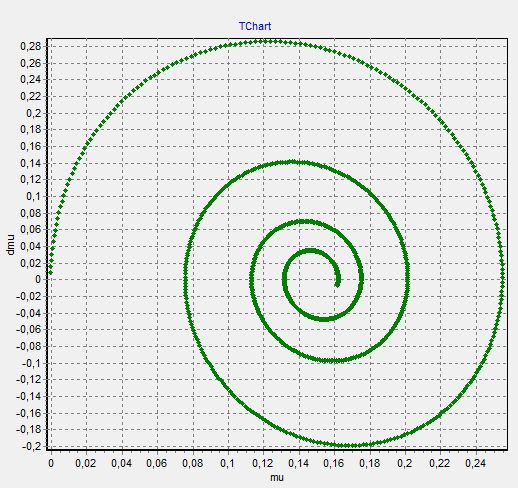
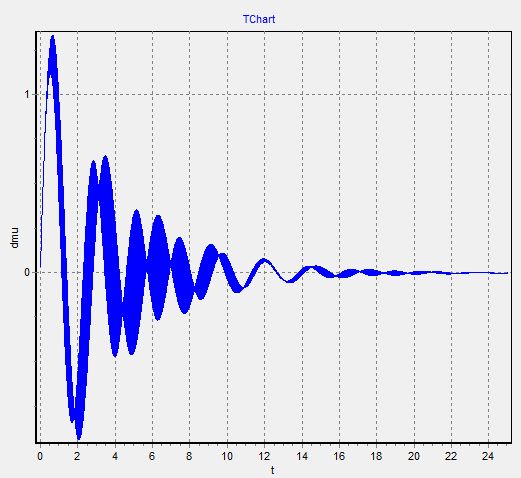
График 2
|
| 2 |
|
| 1 |
|
| 3 |
|
| 0 |
|
| 0 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 1 |
|
| 4 |
|
| 0 |
|
| 0 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения 
2. График  - изменяем
- изменяем  при
при 
Так как при создании графиков они накладываются друг на друга, как в пунке 1
То в таком случае, мы делаем графики отдельно 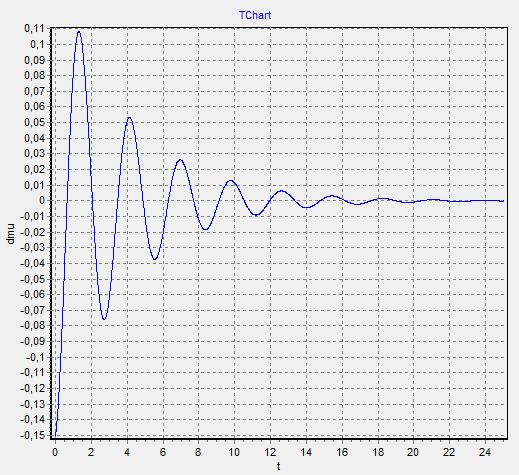
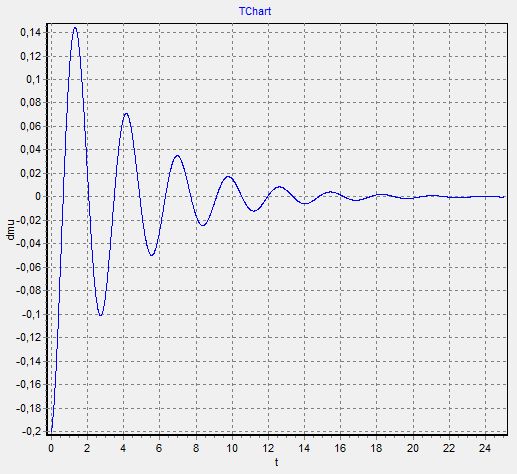
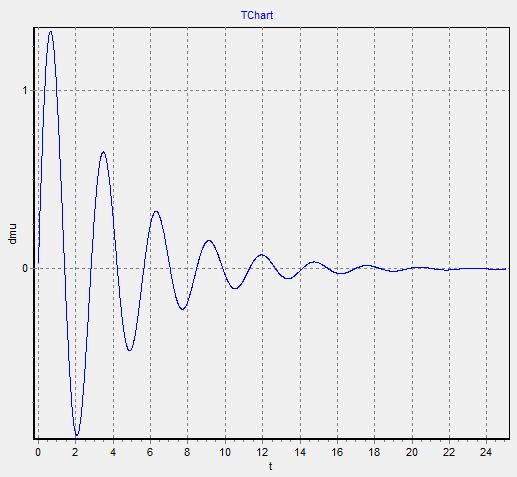
График 3
|
| 2 |
|
| 1 |
|
| 0 |
|
| 3 |
|
| 0 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения
|
| 2 |
|
| 1 |
|
| 0 |
|
| 4 |
|
| 0 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
3. График  - изменяем
- изменяем  при
при 
Так как при создании графиков они накладываются друг на друга, к ак в предыдущих пунктах
То в таком случае, мы чертим графики отдельно
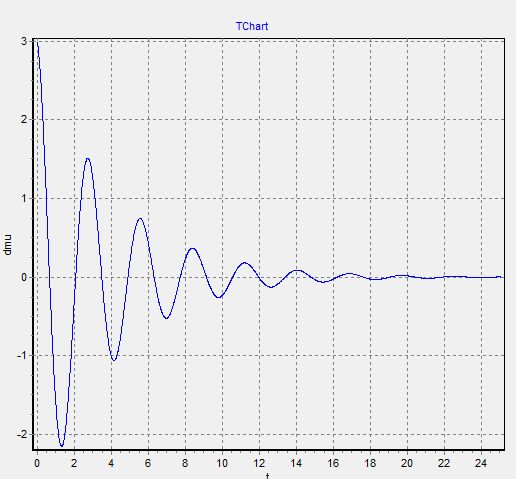
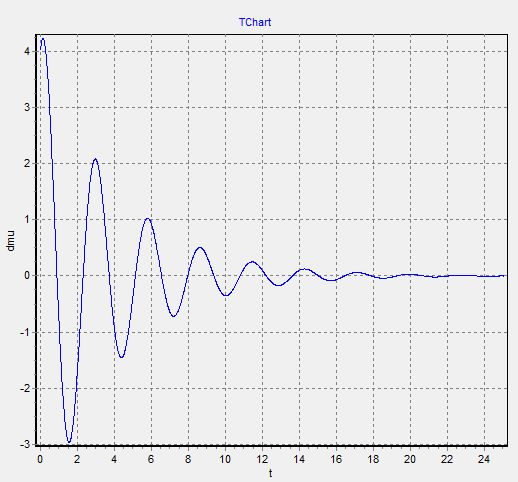
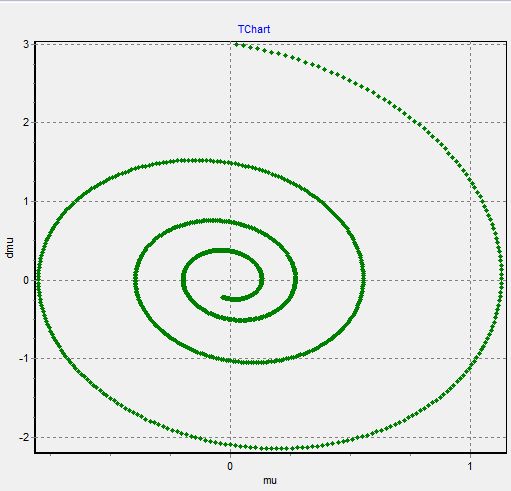
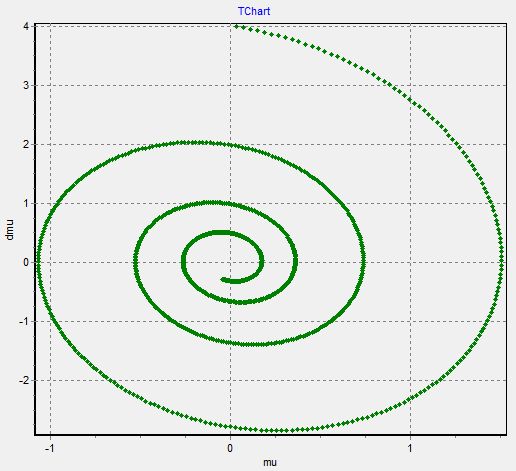
График 4
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 4 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения После изменения
4. График - изменяем при 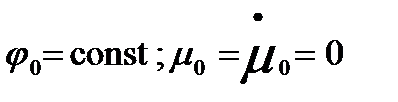


Так как при создании графиков они накладываются друг на друга, к ак в предыдущих пунктах
То в таком случае, мы чертим графики отдельно
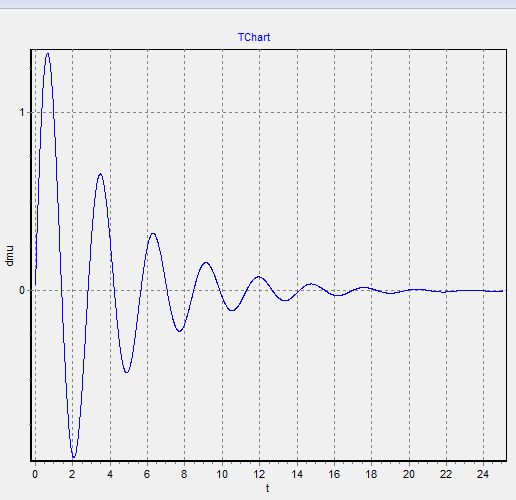
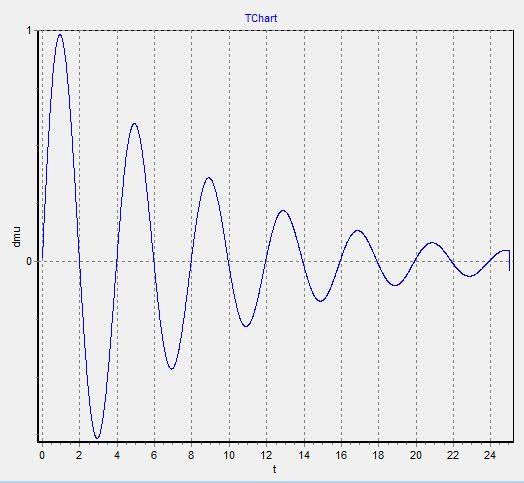
График 5
|
| 2 |

| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 3 |
|
| 0 |
|
| 0 |
|
| 7 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения
5. График - изменяем при
Так как при создании графиков они накладываются друг на друга, как в предыдущих пунктах
То в таком случае, мы чертим графики отдельно
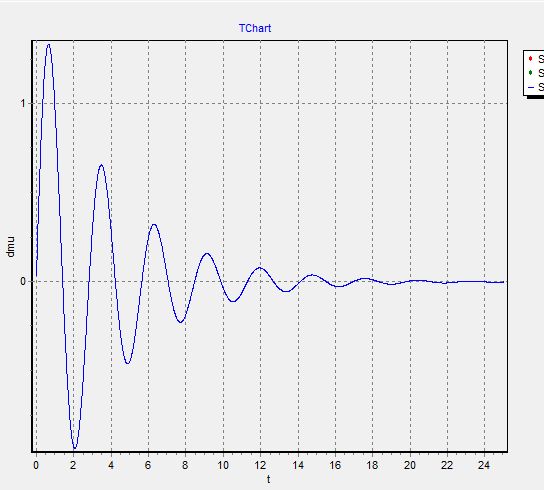
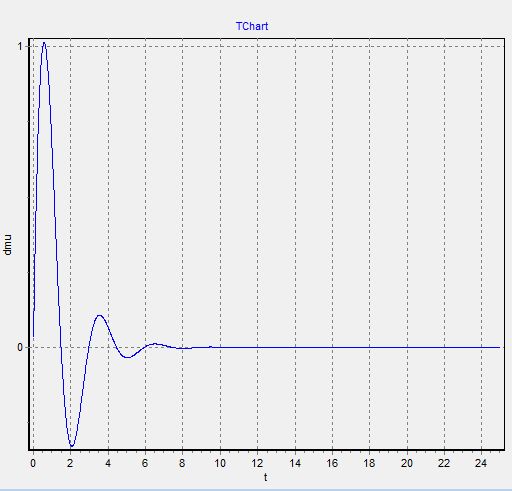
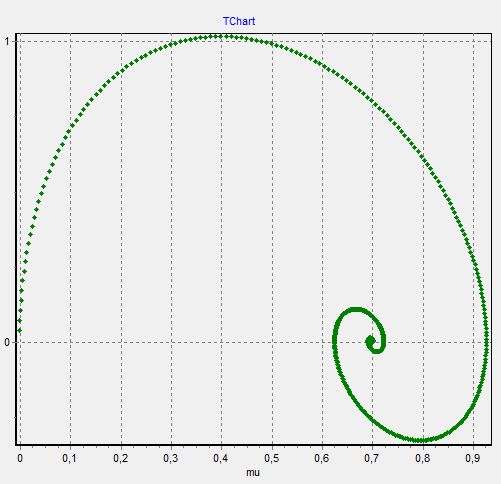
График 6
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
|
| 10 |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
| 15 | |
| Время набл. | 25 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения После изменения
6. График - изменяем при


Так как при создании графиков они накладываются друг на друга, как в предыдущих пунктах
То в таком случае, мы чертим графики отдельно
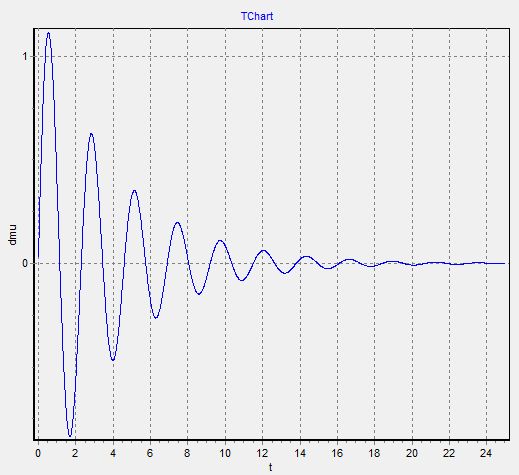
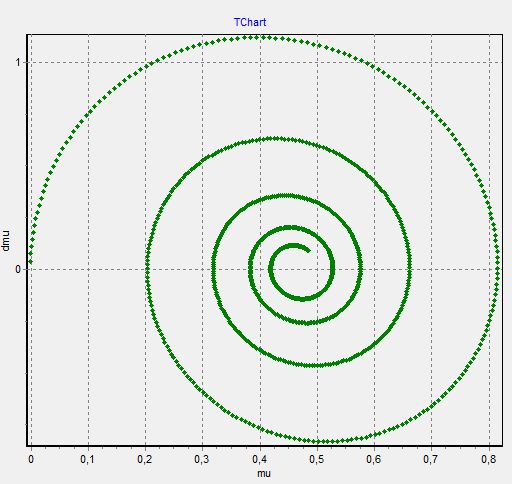
ВЫВОД:
Динамика регулятора Дж.Уатта является устойчивой, так как переходные процессы, в зависимости от различных побудительных причин и параметров на основе предлагаемой математической модели, заканчиваются установившимся режимом.
За исключением графиков №2 и №3, так как отсутствует внешнее воздействие.