
Исследование динамики регулятора Ф. Дженкина.








СПБГМТУ
Кафедра судовой автоматики и измерений
Лаборатория моделирования динамических систем
Лабораторная работа №2
Исследование динамики регулятора Ф. Дженкина.
по дисциплине
«Теория автоматического управления»
Выполнил:
Студент группы №5340
Беляков Михаил Юрьевич
Проверил:
Ассистент
Фёдорова Ольга Игоревна
Санкт – Петербург
2018 год
Оглавление
Цель работы ...........................................................3
Дифференциальное уравнение.............................3
Решение дифференциального уравнения............3
Структурная схема .................................................4
Графики...................................................................5
1. График μ(t)−изменяем φ0 при μ0̇=μ0=0............5
2. График μ(t)−изменяем μ0 при φ0=μ0̇=0 ...........7
3. График μ(t)−изменяем μ0̇ при φ0=μ0=0 .......... 9
4. График μ(t)−изменяем Tr2 при φ0=const,μ0̇=μ0=0 ................................................11
5. График μ(t)−изменяем Tk при φ0=const,μ0̇=μ0=0 ................................................13
ЦЕЛЬ РАБОТЫ
Изучение динамики регулятора Ф. Дженкина с помощью переходных процессов (временных характеристик) в зависимости от каждой из побудительных причин и параметров регулятора.
ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ
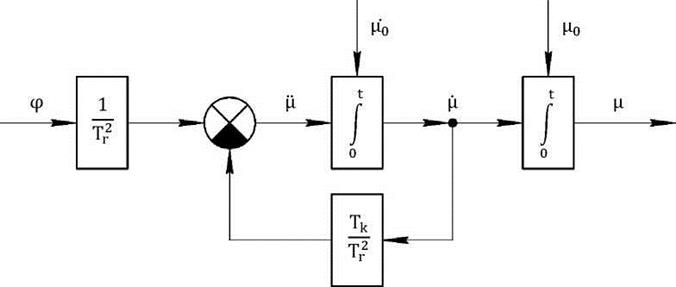
Математической моделью (дифференциальной математической моделью) регулятора является выражение
| Tr2∙μ̈+T k ∙μ̇= j (1), где |
-  - коэффициент, характеризующий инерционные свойства регулятора, [сек 2];
- коэффициент, характеризующий инерционные свойства регулятора, [сек 2];
−  - коэффициент, характеризующий демпфирующие свойства, [сек];
- коэффициент, характеризующий демпфирующие свойства, [сек];
-  - регулирующее воздействие на объект регулирования (выходной сигнал регулятора);
- регулирующее воздействие на объект регулирования (выходной сигнал регулятора);
- μ̇(t) – первая производная от (скорость регулирующего воздействия);
- μ̈(t) - вторая производная от (ускорение регулирующего воздействия);
- j(t) – регулируемая величина объекта (выходной сигнал регулятора);
- 
 ,
,  - начальные отклонения от некоторого состояния равновесия (невозмущённого движения);
- начальные отклонения от некоторого состояния равновесия (невозмущённого движения);
-  - промежуточная переменная, её скорость и начальное отклонение.
- промежуточная переменная, её скорость и начальное отклонение.
РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ
Уравнение вынужденного движения (1) имеет вид:
 (2)
(2)
СТРУКТУРНАЯ СХЕМА
ГРАФИКИ
Снимаем наши графики при данных:
Tr2=2
T k =1
График 1
|
| 2 |
|
| 1 |

| 0 |

| 0 |

| 0,5 |
| Время набл. | 20 сек |
| Шаг | 0,01 |

| 10 |
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 0,5 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения После изменения
1. График μ(t)−изменяем при  =
=  =0
=0

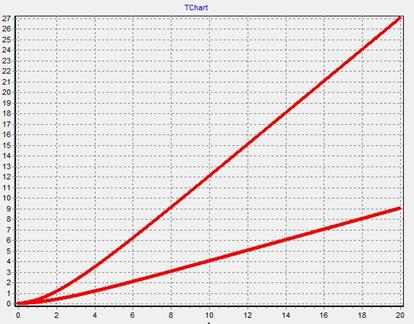

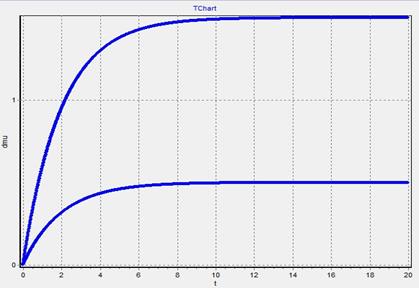
График 2
|
| 2 |
|
| 1 |
|
| 3 |
|
| 0 |
|
| 0 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 1 |
|
| 4 |
|
| 0 |
|
| 0 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения
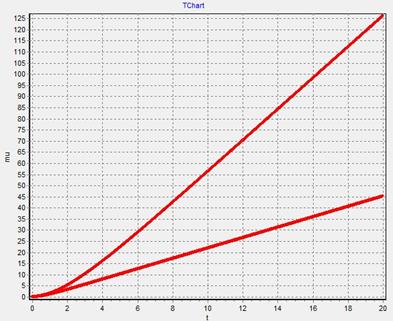
График  - изменяем
- изменяем  при
при 

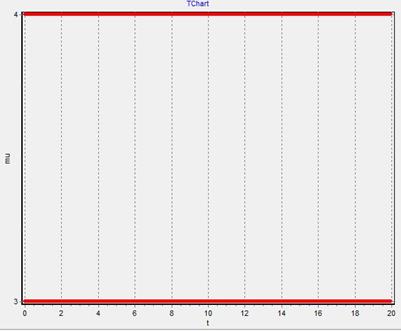



График 3
|
| 2 |
|
| 1 |
|
| 0 |
|
| 3 |
|
| 0 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 1 |
|
| 0 |
|
| 4 |
|
| 0 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения
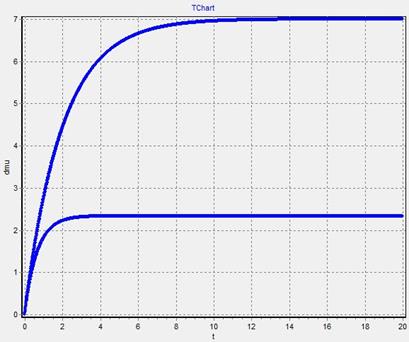
График - изменяем  при
при 


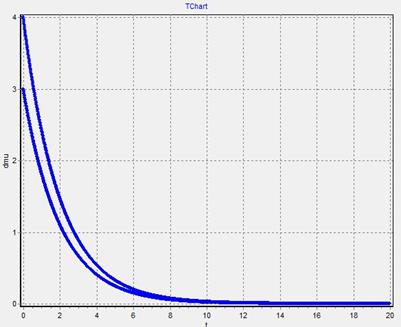


График 4
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 4 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения После изменения
4. График - изменяем при 

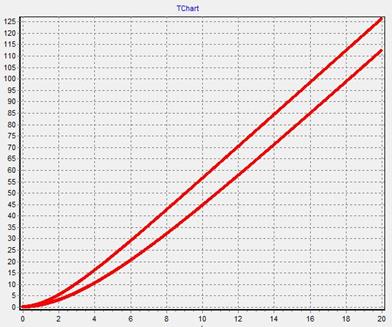



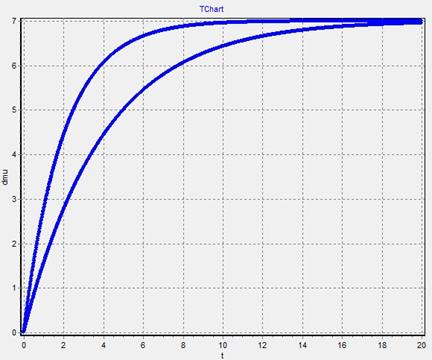


График 5
|
| 2 |
|
| 1 |
|
| 0 |
|
| 0 |
|
| 7 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
|
| 2 |
|
| 3 |
|
| 0 |
|
| 0 |
|
| 7 |
| Время набл. | 20 сек |
| Шаг | 0,01 |
|
| 10 |
До изменения  После изменения
После изменения
5. График - изменяем при



ВЫВОД:
Регулятор Ф. Дженкина это статический регулятор, при котором регулируемая величина принимает точное значение в установившемся режиме и не зависит от величины возмущающего фактора.