
Лабораторная работа №2 (М219)








Торможение двигателя постоянного тока в функции времени
Цель работы: изучить принцип и схему торможения ДПТ в функции времени.
Таблица
| Измерено | ||
| Рабочее место №1 | Рабочее место №2 | |
| RT, Ом | 81÷1104 | 80÷1083 |
| RЯ, Ом | 67,5 | 74,5 |
| nнач, об/мин | 3000 | 3200 |
Тип двигателя: СЛ-221
U ян = 110В
n ян = 3600-4600 об/мин
I ян = 0,35 А
J дв = 0,00055 кг*м²
η = 33%
Параметры нагрузки:
Мс = 0,1-0,12 Н*м
Jсистемы =0,0009397 кг ∙ м2(см. ЛР №1)
Основные понятия
Управление в функции времени получило широкое применение в современных электроприводах постоянного и переменного тока, благодаря своим достоинствам: простоте схемы, надёжности и независимости её работы от колебаний нагрузки или напряжения.
Для двигателей постоянного тока независимого и параллельного возбуждения возможны следующие режимы работы: а) двигательный; б) режим генераторного торможения с отдачей энергии в сеть; в) режим торможения противовключением; г) режим динамического торможения.
После отключения ДПТ от источника электропитания якорь двигателя некоторое время продолжает вращаться по инерции, за счёт запасённой кинетической энергии. Часто требуется быстро и точно остановить вращаемый двигателем механизм или изменить направление его вращения. Торможение электродвигателей может быть произведено как с помощью механических тормозов, так и электрических, что предпочтительнее.
Для быстрого торможения двигателя его переводят в режим, когда электромагнитный момент становится тормозящим для якоря, т. е. когда момент и скорость направлены встречно. При этом механическая энергия вращения преобразуется в электрическую, рассеиваемую в виде теплоты в резисторах цепи якоря, или передаётся в сеть.
Генераторное торможение наступает при частоте вращения якоря, превышающей частоту вращения идеального холостого хода. В этом случае ЭДС якоря Ея становится больше напряжения сети U и ток якоря изменяет направление по отношению к току в двигательном режиме:
 .
.
В связи с изменением направления тока якоря меняет свое направление электромагнитный момент электродвигателя и становится тормозящим. Характеристики электродвигателя в этом режиме, являясь продолжением характеристик в двигательном режиме, располагаются во втором квадранте осей координат (рис.2.1).
Торможение противовключением происходит в том случае, когда обмотки электродвигателя включены для одного направления вращения якоря, а под действием каких-либо внешних причин якорь вращается в противоположную сторону. В этом случае момент двигателя становится тормозящим.
Поскольку в режиме торможения противовключением вращение якоря происходит в сторону, противоположную по сравнению с вра-щением в двигательном режиме, то ЭДС якоря меняет свое направление и действует согласно с приложенным к цепи якоря напряжением:

Таким образом, ток якоря в режиме торможения противовключе-нием больше чем в двигательном режиме и его необходимо ограничивать. С этой целью в режиме противовключения в цепь якоря вводят добавочное сопротивление.
При использовании этого режима для останова двигателя в момент, когда его скорость станет равной нулю, цепь якоря необходимо отключить от сети, иначе произойдет реверс.
Характеристики электродвигателя в режиме противовключения располагаются в четвёртом квадранте и являются продолжением характеристик в двигательном режиме (см. рис. 2.1).
Динамическое торможение электродвигателя наступает при отключении обмотки якоря от сети и замыкании ее на некоторое сопротивление Rт. Обмотка возбуждения при этом остаётся подключенной к сети. Якорь продолжает вращаться за счёт сил инерции, двигатель переходит в генераторный режим, но энергия, вырабатываемая при этом, преобразуется в тепловую, выделяемую на Rт и R Я.
В режиме динамического торможения ЭДС якоря не изменяет своего направления по сравнению с двигательным режимом, но так как напряжение сети равно U = 0, то ток якоря, изменив свое направление, действует согласно с ЭДС. В этом режиме ток якоря:


где R∑ = R Я + R Т.
Тормозной момент:  .
.
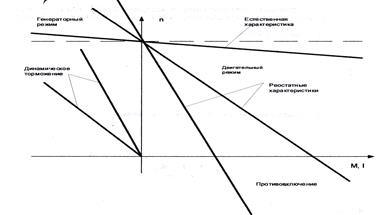
Рис. 2.1. Электромеханические характеристики ДПТ независимого возбуждения
Из последнего следует, что торможение якоря в этом режиме происходит до полной остановки.
Характеристики электродвигателя в режиме динамического торможения выходят из начала координат и располагаются во втором квадранте (см. рис.2.1).
После отключения ДПТ от источника электропитания якорь двигателя некоторое время продолжает вращаться по инерции, за счёт запасённой кинетической энергии. Часто требуется быстро и точно остановить вращаемый двигателем механизм или изменить направление его вращения. Торможение электродвигателей может быть произведено как с помощью механических тормозов, так и электрических, что предпочтительнее.
Для быстрого торможения двигателя его переводят в режим, когда электромагнитный момент становится тормозящим для якоря, т. е. когда момент и скорость направлены встречно. При этом механическая энергия вращения преобразуется в электрическую, рассеиваемую в виде теплоты в резисторах цепи якоря, или передаётся в сеть.
Динамическое торможение электродвигателя наступает при отключении обмотки якоря от сети и замыкании её на некоторое сопротивление RТ. Обмотка возбуждения при этом остаётся подключённой к сети. Якорь продолжает вращаться за счёт силы инерции, двигатель переходит в генераторный режим, но энергия, вырабатываемая при этом, преобразуется тепловую, выделяемую на RТ и RЯ.
В режиме динамического торможения ЭДС якоря не изменяет своего направления по сравнению с двигательным режимом, но так как напряжение сети равно U=0, то ток якоря, изменив своё направление, действует согласно с ЭДС. В этом режиме ток якоря IЯ= - EЯ/RΣ,
где RΣ=RЯ + RТ.
Тормозной момент: - МТ=См ∙ СЕ ∙ Ф2 ∙ n/RΣ.
Из последнего следует, что торможение в этом режиме происходит до полной остановки.
Торможение ДПТ в функции времени является одним из способов динамического торможения. Для осуществления данного принципа в схеме динамического торможения применяется электромагнитное реле времени. Торможение двигателя будет происходить до полной остановки.
Необходимая выдержка реле времени до полной остановки определяется по формуле.
tрв = Tм * ln  ,
,
где ωнач – скорость вращения, с которой начинается торможение;
Δωс – перепад угловой скорости при нагрузке МС.
Электромеханическая постоянная времени Tм определяется по формуле:

 ,
,
где R- полное сопротивление якорной цепи, R=RЯ+RТ;
J - момент инерции системы.
СM – конструктивный коэффициент момента.
Перепад угловой скорости при нагрузке моментом МС определяется по формуле:
 .
.
Из выражения  в номинальном режиме находим конструктивный коэффициент ЭДС
в номинальном режиме находим конструктивный коэффициент ЭДС  .
.
Известно, что СМ = 9.55*  ; выражаем частоту вращения n через угловую скорость
; выражаем частоту вращения n через угловую скорость  .
.
Порядок расчета выдержки реле времени К9:
1. Рассчитываем СЕФ.  .
.
2. Рассчитываем СМ. СМ = 9.55*  .
.
3. Рассчитываем сопротивление RТ в цепи торможения.
Внешнее сопротивление динамического торможения можно рассчитать по формуле: RТ =  - RЯ .
- RЯ .
Здесь при расчётах вместо Е нужно подставить максимально возможную величину Емакс, получаемую в начальный момент торможения, вместо I – допустимый в начале торможения ток Iдоп. Практически, если до начала торможения двигатель работал с полным магнитным потоком, то принимают Емакс= Uн, а допустимый ток Iдоп – примерно равным двухкратнгому значению номинального тока, т.е. Iдоп=2Iн. Поэтому формула для расчёта имеет вид:
 .
.
4. Рассчитываем  .
.  .
.
4. Рассчитываем ТМ.  .
.
5. Рассчитываем tРВ.  .
.