
Этап 7. Составление системы булевых уравнений.








Для нашего устройства по кодированной таблице переходов и выходов составим следующие функции:
- функции возбуждения элементарного автомата (триггеров D-типа) qi(t)
- функцию выхода у1ф(t)
q2 (t) = 1 = 4(0100)+5(0101)+6(0110)+11(1011)
q1 (t) = 1 = 1(0001)+2(0010)+4(0100)+ 6(0110)
q0 (t) = 1 = 2(0010)+4(0100)+6(0110)+ 8(1000)
y1ф = 1 = (1111)
Логические уравнения представим в виде СДНФ (совершенной дизъюнктивной нормальной формы).
q2(t) = x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0
q1(t) = x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0
q0(t) = x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0 + x1фQ2Q1Q0
yф = x1фQ2Q1Q0
Этап 8. Минимизация системы булевых уравнений.
В ходе минимизации нам нужно перевести уравнения в МДНФ (минимальную дизъюнктивную нормальную форму). Проведем эту минимизацию с помощью карт Карно.
| X1фQ2Q1Q0 0010 2 | X1фQ2Q1Q0 0011 3 | X1фQ2Q1Q0 0001 1 | X1фQ2Q1Q0 0000 0 |
| X1фQ2Q1Q0 0110 6 | X1фQ2Q1Q0 0111 7 | X1фQ2Q1Q0 0101 5 | X1фQ2Q1Q0 0100 4 |
| X1фQ2Q1Q0 1110 14 | X1фQ2Q1Q0 1111 15 | X1фQ2Q1Q0 1101 13 | X1фQ2Q1Q0 1100 12 |
| X1фQ2Q1Q0 1010 10 | X1фQ2Q1Q0 1011 11 | X1фQ2Q1Q0 1001 9 | X1фQ2Q1Q0 1000 8 |
По общей карте получим минимизированные формы уравнений системы:
q2
| 0 | 0 | 0 | 0 |
| 1 | 0 | 1 | 1 |
| 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 |
q1
| 1 | 0 | 1 | 0 |
| 1 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 |
q0
| 1 | 0 | 0 | 0 |
| 1 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 |
| 0 | 0 | 0 | 1 |
q2 = x1Q2Q1Q0 + x1Q2Q1Q0 + x1Q2Q1
q1 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0
q0 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0
y1 = x1Q2Q1Q0
 Этап 9. Составление функциональной схемы.
Этап 9. Составление функциональной схемы.
Этап 10. Разработка принципиальной схемы. Выбор технологии.
Технологии производства твердотельных схем характеризуются своим базовым элементом.
Для нашей разработки выберем серию базовых элементов КР1533. Это И-НЕ элементы (элементы Шеффера), ТТЛ, питание +5В, минимальная задержка на вентиле 11нс.
Перейдем от МДНФ логических уравнений к И-НЕ форме при помощи закона Де-Моргана.
 | |
| |
q2 = x1Q2Q1Q0 + x1Q2Q1Q0 + x1Q2Q1

 q1 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0
q1 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0
 q0 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0
q0 = x1Q1Q0 + x1Q2Q0 + x1Q2Q1Q0

 y1 = x1Q2Q1Q0
y1 = x1Q2Q1Q0
 | |||||||
 | |||||||
 |  | ||||||
q2 = x1Q2Q1Q0 · x1Q2Q1Q0 · x1Q2Q1



 q1 = x1Q1Q0 · x1Q2Q0 · x1Q2Q1Q0
q1 = x1Q1Q0 · x1Q2Q0 · x1Q2Q1Q0


 q0 = x1Q1Q0 · x1Q2Q0 · x1Q2Q1Q0
q0 = x1Q1Q0 · x1Q2Q0 · x1Q2Q1Q0
y1 = x1Q2Q1Q0
 | |||
 | |||
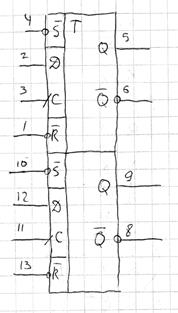 |
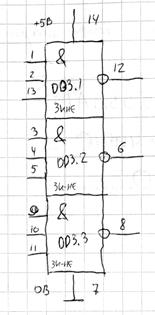
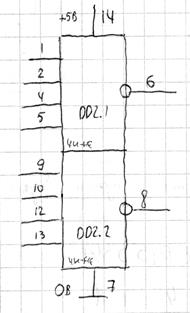
Уравнения показывают, что для разработки принципиальной схемы нам необходимо иметь вентили 4И-НЕ и 3И-НЕ (КР1533ЛА1 и КР1533ЛА4), а также D-триггер (КР1533ТМ2).
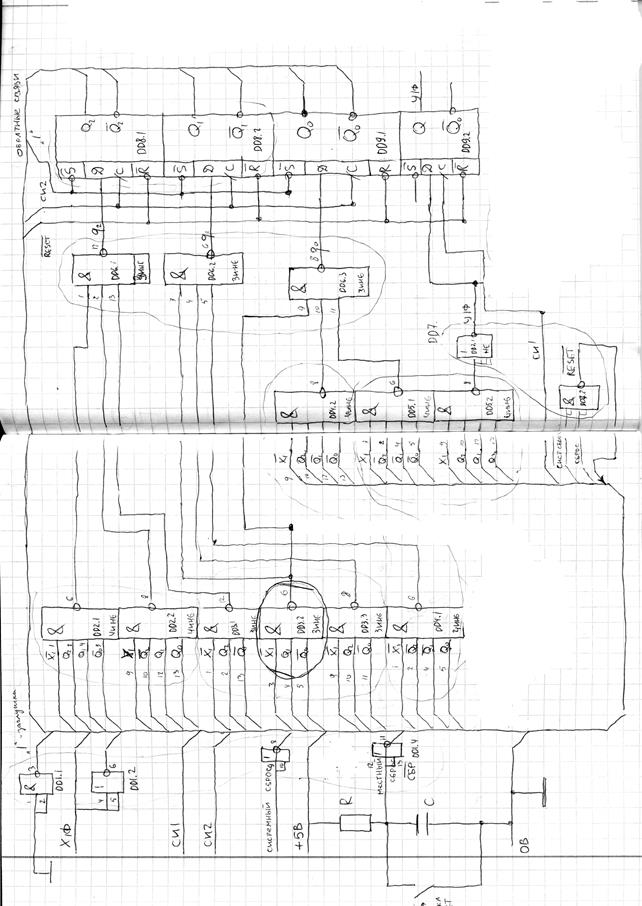 |
Так будет выглядеть принципиальная схема:
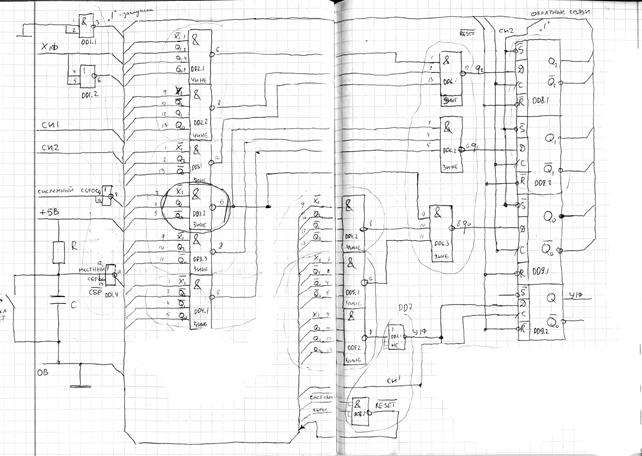
Также необходимо выяснить, на какой тактовой частоте будет работать наше устройство. А именно, через какое минимальное время можно изменить x1ф на входе, чтобы сигнал от предыдущего x1ф успел пройти через три слоя вентилей, слой триггеров и по цепям обратной связи вернуться на вход комбинационной схемы автомата? Для этого нужно сложить задержки на каждом из этих элементов.
τmin = 11 нс + 11 нс + 11 нс + 20 нс = 53 нс
Fmax = 1/τmin = 18 МГц.
Fmax — это максимальная частота разгона, за которое автомат успеет учесть предыдущее значение на входе.
Рабочая частота, как правило, составляет 70-80% от максимальной, для стабильности и надежности.
Fрабочая = 0,7Fmax = 15 МГц
Еще одна важная задача, которая встает перед нами — фильтрация помех.
Для фильтрации низкочастотных помех, которые приходят извне, установим на входе питания 0...+5В электролитический конденсатор. Для фильтрации высокочастотных помех, которые появляются при переключении транзисторов, применяются керамические конденсаторы на каждом из корпусов (по входу питания 0...+5В).
Теперь необходимо согласовать все устройства: устройство ввода (три кнопки — «1», «0», «сброс»), логику автомата и электромагнитный привод замка.
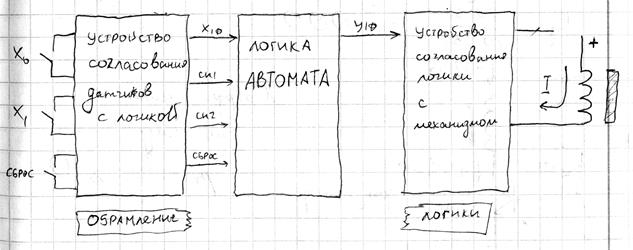 |
Устройство согласования логики с механизмом представляет из себя усилитель тока.
Чтобы удерживать замок закрытым, необходима мощность в 20 Вт. Максимальные характеристики тока в нашем устройстве — 10 мА и 2В, что даёт P = IU = 20 мВт.
Коэффициент усиления устройства согласования будет равен 20 Вт / 20 мВт = 1000.
Усилитель выполняют в виде каскада из транзисторов с коэффициентом усиления по току β≈10.
Этот каскад собирают в едином корпусе.
Устройство согласования логики с датчиками должно предотвратить основную проблему контактов с механическим управлением — дребезг контактов.
Дребезг контактов — это помехи, которые возникают из-за упругости контактов. При нажатии они пружинят, и вместо единого сигнала подают на линию несколько паразитных импульсов.
Дребезг контактов нужно отфильтровать с помощью фильтра НЧ, а затем подать на вход триггера Шмидта. ТШ — это двухпороговое устройство с петлей гистерезиса, которое работает по следующей схеме:
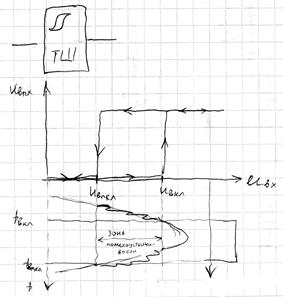
Таким образом, формируется зона помехоустойчивости. Помехи в зоне перехода не приведут к изменению сигнала.
Теперь необходимо сформировать сигнал «Сброс». Фильтрацию на сброс можно и не ставить. «Сброс» устанавливает наш автомат в начальное состояние a0.
Рис10
Окончательно, принципиальная схема устройства согласования логики с датчиками будет выглядеть так:
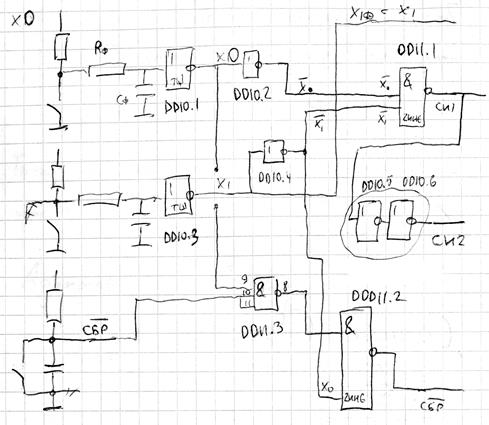 |
После это выполним расчет параметров R и C:
Если кнопку устройства мы удерживаем 145 мс (для примеры мы взяли величину, равную PIN), то
2,3 RC < 145 мс
Rф = 1 кОм
Сф = (145*10-3)/(2,3*1000) = 60 мкФ
II. Вторая часть курсового проекта.
Этап 1. Идея.
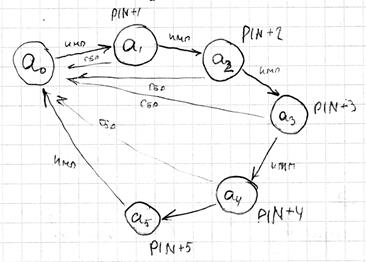
Задача: разработать двоичный счетчик, который из исходного состояния, соответствующему своему PIN-коду при поступлении пяти импульсов на вход выдает следующие пять пин-кодов и возвращается в исходное состояние (свой пин-код).
Реализовать в виде автомата Мура (выход подавать с триггеров).
Всего на входе должно быть две кнопки: импульс и сброс.
Этап 2. Техническое задание.
Как и в первой части, определяем множества значений на входе, выходе; составляем граф множества состояний автомата.
 |
Этап 3. Составление таблицы переходов и выходов автомата.
В автомате Мура одна такая таблица — отмеченная, в которой каждое состояние отмечено своим выходным сигналом.
Таблица 1.
| выход | PIN | PIN+1 | PIN+2 | PIN+3 | PIN+4 | PIN+5 |
| Вход \ сост | a0 | a1 | a2 | a3 | a4 | a5 |
| X = СИ | a1 | a2 | a3 | a4 | a5 | a0 |
| СБРОС | a0 | a0 | a0 | a0 | a0 | a0 |
Этап 4. Кодирование элементов.
Таблица 2.
| X1ф = СИ | |
| пауза | 0 |
| импульс | 1 |
Примем кодировку всех восьми выходов прямой.
Таблица 3.
| Q7 | Q6 | Q5 | Q4 | Q3 | Q2 | Q1 | Q0 | |
| Q0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| Q1 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 0 |
| Q2 | 1 | 0 | 0 | 1 | 0 | 0 | 1 | 1 |
| Q3 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 0 |
| Q4 | 1 | 0 | 0 | 1 | 0 | 1 | 0 | 1 |
| Q5 | 1 | 0 | 0 | 1 | 0 | 1 | 1 | 0 |

Видно, что триггеры для хранения констант не нужны. Их значения можно брать с ВУ или НУ напряжения прямо в схеме.
Нам потребуется только три триггера для хранения переменных.
Этап 5. Выбор типа элементарных автоматов.
Как и в первой части, необходимо определиться с элементной базой. Выберем уже знакомый нам D-триггер с динамическим приемом информации.
Динамический способ необходим для того, чтобы исключить автогенерацию.
Кроме того, как уже упоминалось, триггер обладает простейшей матрицей переходов и выходов.
Таблица 4.
| Q(t) | Q(t+1) | q(t) |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 0 |
| 1 | 1 | 1 |